 电子发烧友App
电子发烧友App


ESP(电子稳定程序)是汽车电控的一个标志性发明。不同的研发机构对这一系统的命名不尽相同,如博世(BOSCH)公司早期称为汽车动力学控制(VDC),现在博世、梅赛德—奔驰公司称为ESP;丰田公司称为汽车稳定性控制系统(VSC)、汽车稳定性辅助系统(VSA)或者汽车电子稳定控制系统(ESC);宝马公司称为动力学稳定控制系统(DSC)。尽管名称不尽相同,但都是在传统的汽车动力学控制系统,如ABS和TCS的基础上增加一个横向稳定控制器,通过控制横向和纵向力的分布和幅度,以便控制任何路况下汽车的动力学运动模式,从而能够在各种工况下提高汽车的动力性能。
方向盘转角传感器接口
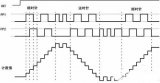
方向盘转角传感器的输出为正交编码脉冲。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移,如图1所示。通过检测2路信号的相位关系可以判断为顺时针方向和逆时针方向,并据此对信号进行加/减计数,从而得到当前的计数累计值,也即方向盘的绝对转角,而转角的变化率即角速度,则可通过信号频率测出。另外,方向盘转角传感器有一个零位输出信号,当方向盘在中间位置时,该信号输出0V,否则输出5V,通过该信号,可对绝对转角进行在线校准。

图1 方向盘转角传感器脉冲序列波形
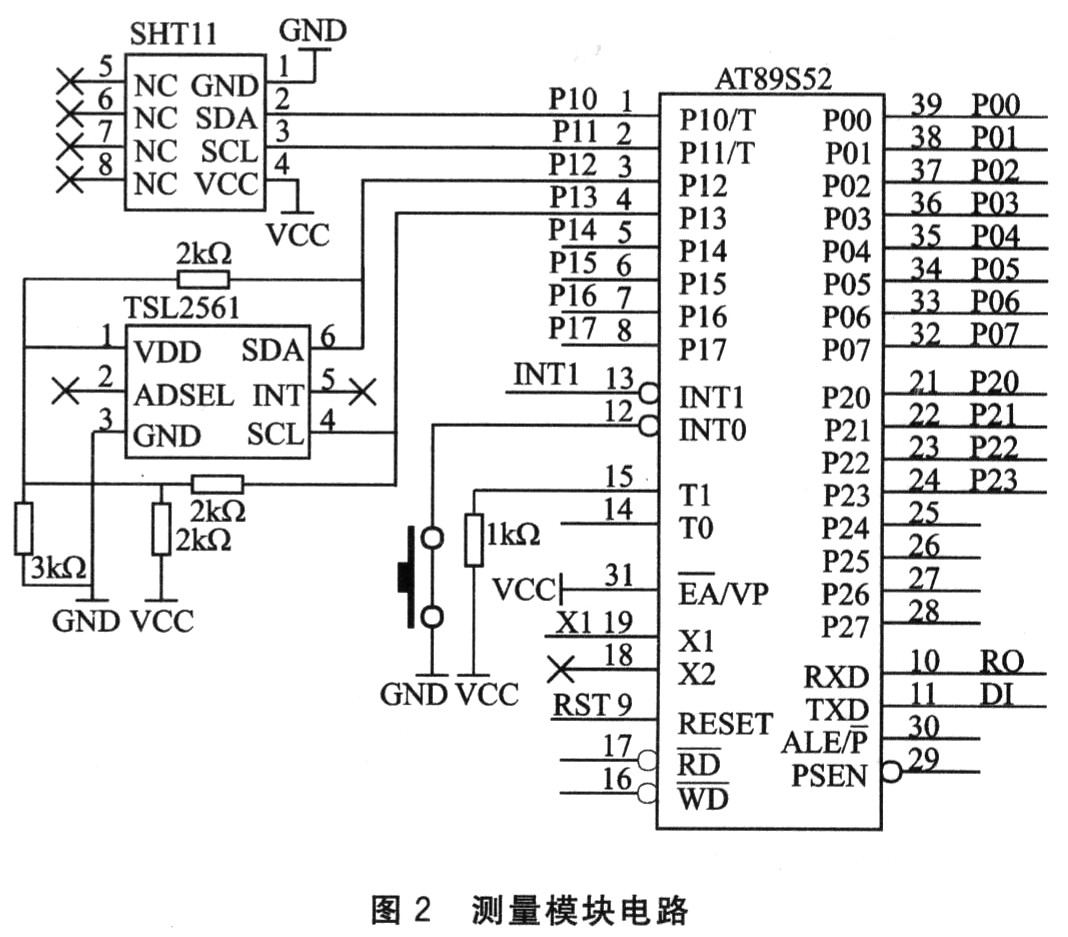
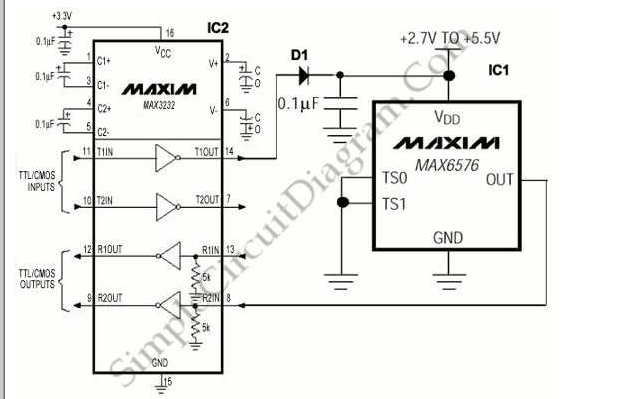
C164CI 与方向盘转角传感器的接口电路如图2所示。片内内置增量编码的正交解码器,该解码器使用定时器3的两个引脚(T3IN、T3EUD)作为正交脉冲的输入,在正确设置相关寄存器后,定时器3的数据寄存器的值与方向盘转角成正比,故可方便的计算转角,本文所使用的方向盘转角传感器每一圈对应44个脉冲,设定时器3的数据寄存器为T3,则绝对转角为。

图2 方向盘转角传感器接口电路
进行差分运算,即可得到转角变化速率。微控制器把计算得到的参数通过CAN发送给ECU。
轮速传感器接口
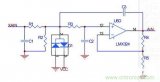
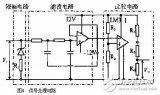
根据前面部分介绍的轮速传感器信号特点,设计接口电路如图3所示。

图3 轮速传感器接口电路
电路采用两级滤波和整形,以保证轮速信号在极低转速下不会丢失,同时避免因悬架振动引起的信号干扰。图中由电阻R2引入第一级迟滞比较,而使用74HC14引入第二级迟滞比较。
横摆角速度、纵向/横向加速度传感器
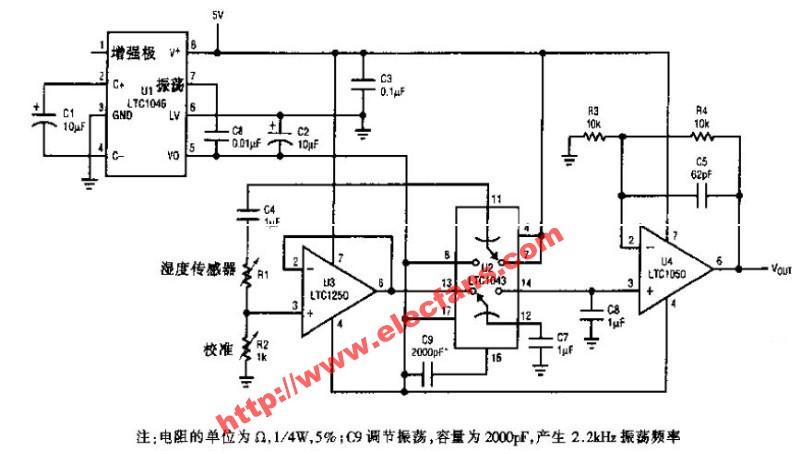
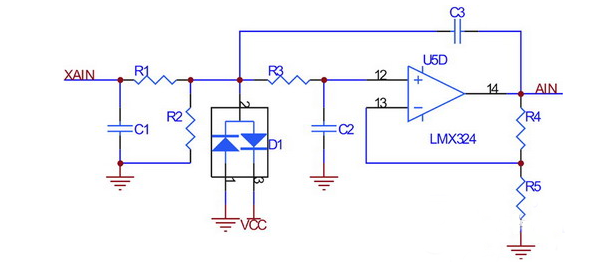
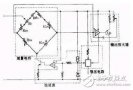
横摆角速度、纵向/横向加速度传感器的安装位置基本相同,输出都是0V-5V的模拟量,由于汽车颠簸造成的信号波动特性一致,故封装在同一模块中。其硬件接口如图4示,实现硬件模拟前置滤波,以抑制来自传感器的模拟信号中的高频噪声成分,防止在采样过程中出现混叠现象。
调整图4中各个阻容元件的参数,即可设置滤波截止频率和延时大小。汽车运行过程中,在较好路面上行驶时,由于信号较好,延时尽量要小,而在颠簸路面上行驶,则希望滤波效果要好。但是由于硬件滤波的频率特性一经设计完毕,无法实时修改,故需要在软件中设计数字滤波环节。数字滤波常用的有维纳滤波器、卡尔曼滤波器、线性预测器、自适用滤波器等。在这里选用计算量小、实时性能好的一阶低通滤波。

图4 横摆角速度、纵向/横向加速度传感器接口电路
编者结语
本文讨论了ESP系统中常用传感器的结构特点及信号特性,并设计了各个传感器的信号处理接口,其中包括硬件接口电路以及软件处理方案。设计了包含横摆角速度、纵向/横向加速度传感器的集成模块,通过CAN总线与ECU进行数据传输,具有较好的抗干扰性和可靠性。











 工商网监
工商网监
评论