 电子发烧友App
电子发烧友App


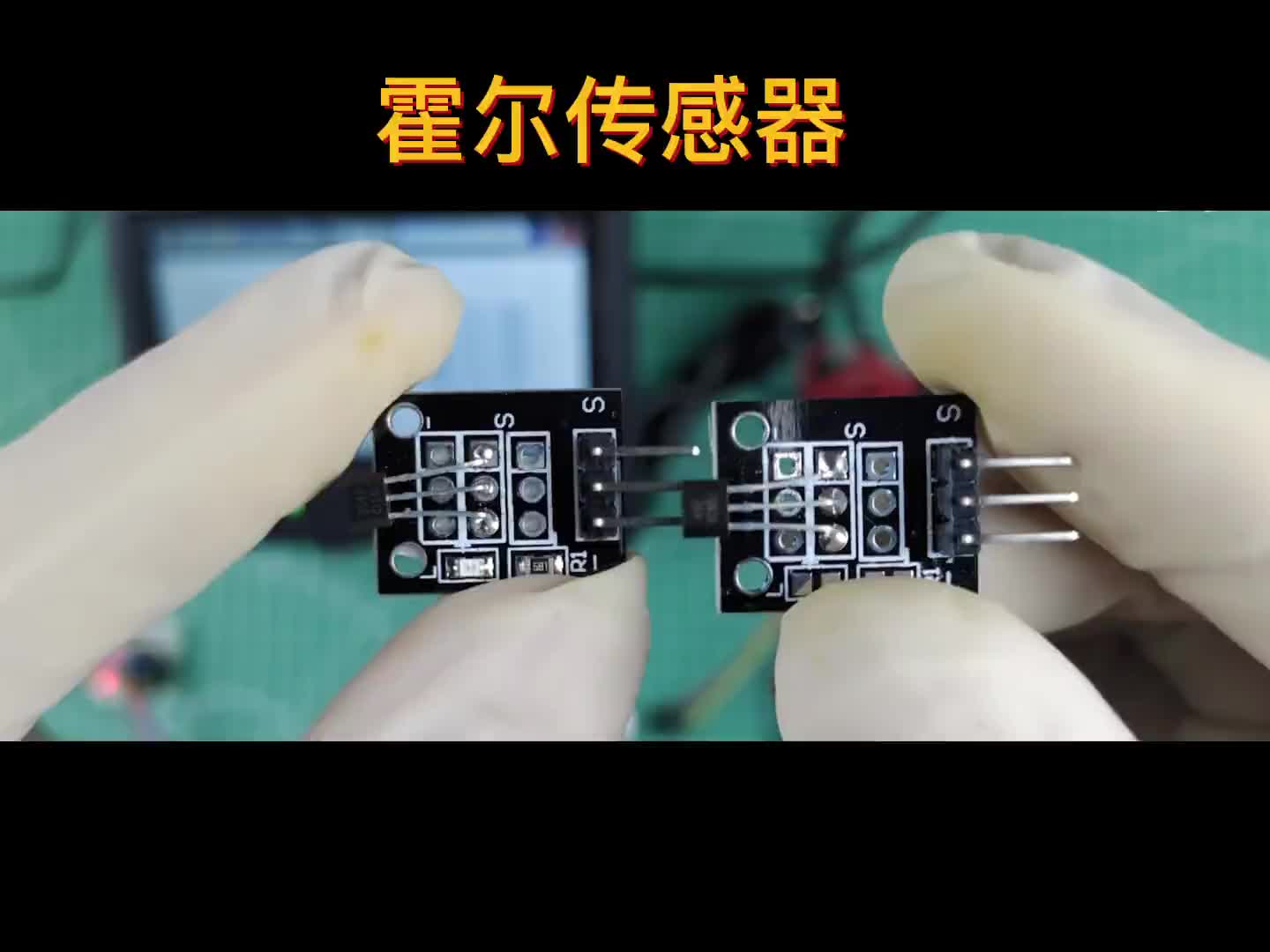
霍尔传感器简介
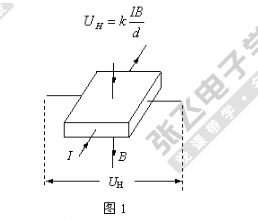
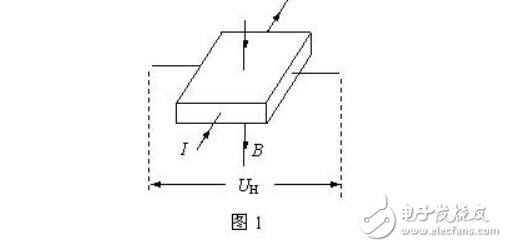
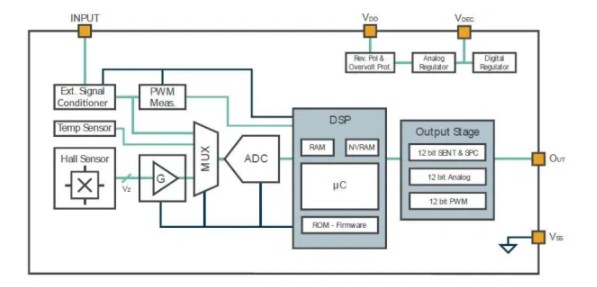
由于霍尔元件产生的电势差很小,故通常将霍尔元件与放大器电路、温度补偿电路及稳压电源电路等集成在一个芯片上,称之为霍尔传感器。

霍尔传感器的种类:
线性霍尔传感器,开关霍尔传感器
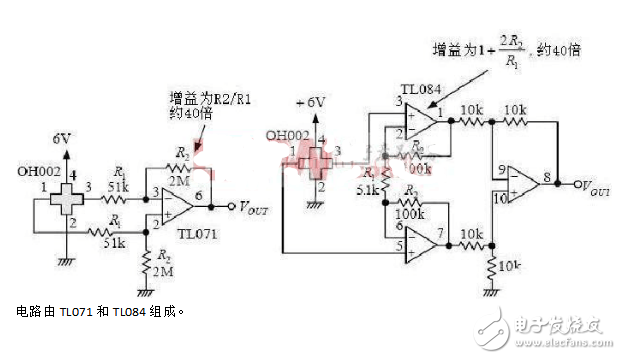
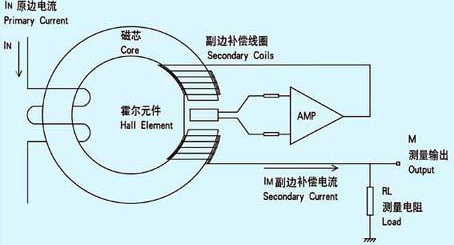
1、线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,它输出模拟量。可以做成电流传感器(钳形电流表),位移测量传感器。
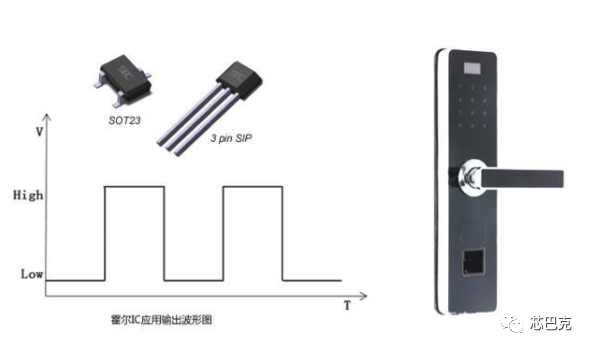
2、开关型霍尔传感器由稳压器、霍尔元件、差分放大器,和输出级组成,它输出数字量。开关型霍尔传感器主要用于测转数、转速、风速、流速、接近开关、关门告知器、报警器、自动控制电路等。
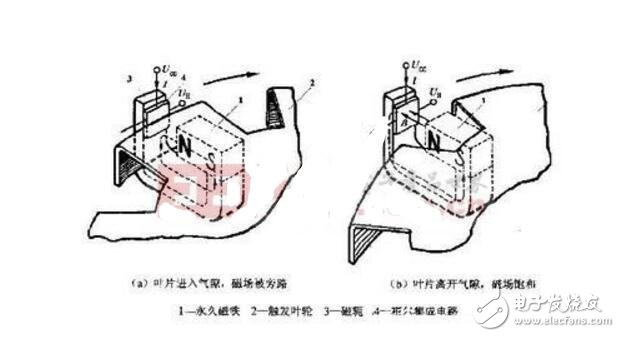
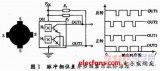
霍尔开关传感器测速原理:
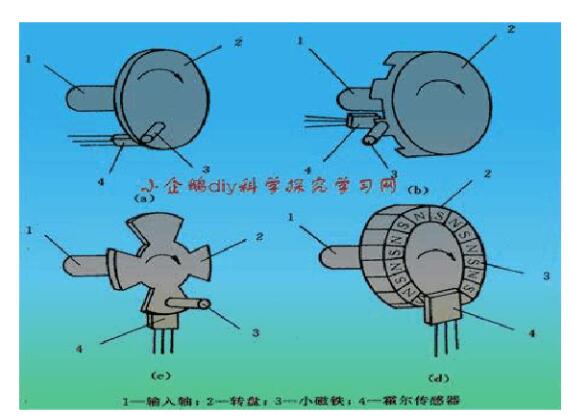
小磁铁固定在转盘上,转盘与电机轴相连,同步转动,小磁铁通过霍尔传感器时,霍尔传感器产生一个相应的脉冲,计算出两个连续脉冲的间隔时间,就可以计算出被测转速。
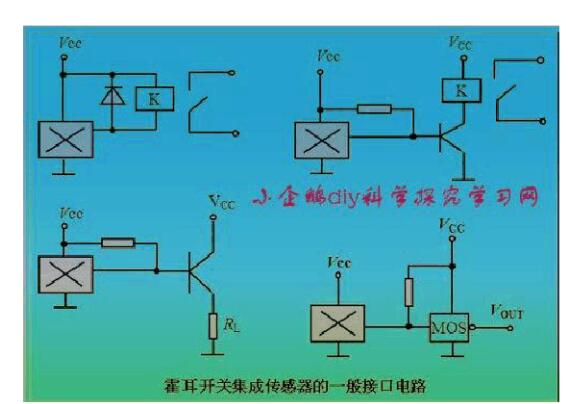
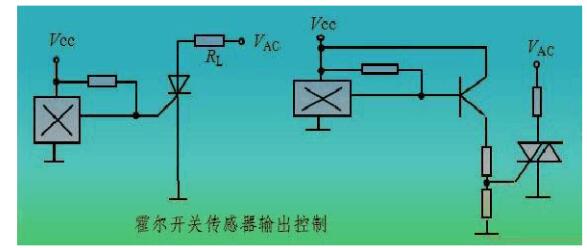
霍尔传感器的输出控制
霍尔传感器测速电路设计方案(一)
1、系统总设计要求
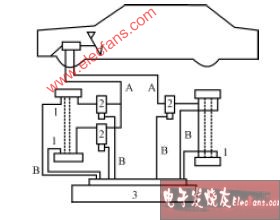
如果把霍尔传感器放在电机预定的位置上,当电机转动时,永磁体经过霍尔传感器时,可以测量电路中的脉冲信号。根据脉冲信号的分布可以测得电机速度。
2、系统实现方案
(1)霍尔测速模块的选择
方案一:采用霍尔元件传感器;选型号OH137产品性能好、灵敏度、电路可和各种逻辑电路直接相连,价格也便宜(10~20元之间不等)。
方案二:采用霍尔传感器;选型号为CHV-25P/10的霍尔传感器,其额定电压为10V,输出信号5V/25mA,电源为12~15V。体积大,价格较贵(40~120元之间不等)。
从性价比方面综合考虑,选择方案一。
(2)计数模块的选择
可以采用片外计数器和片内计数器两个方案。片外计数器的方案是采用8253等片外专用计数芯片进行脉冲计数,单片机控制8253的过程,并在技术完毕后读取计数值。片内计数方案是指采用单片机的内部计数器完成对脉冲的计数过程。
使用片内计数器的优点在于降低单片机系统的成本。每到一个脉冲将会产生一个T1的计数,在T0产生的100ms中断完成后,T1的中断溢出次数就是所需要计的脉冲数。特点在于:使用了内部的T1作为外部脉冲的计数器,并且,为了避免计数器的溢出,将T1的初值设为0。所以选用片内计数。
(3)显示方式的选择
方案一:采用8段LED数码管作为显示模块核心。数码管显示器件相对便宜,但是耗能大、编写程序相对麻烦,工作量大。
方案二:采用LCD液晶显示器作为显示模块核心。LCD显示器工作原理简单,编程方便,节能环保。因此选择方案二。
(4)单片机模块的论证与选择
方案一:选用 AT89C2051单片机速度快、功耗低、体积小、资源丰富。
方案二:选用PhilipsP89C51RD2有4个PDA,属于兼容版。
方案比较:因为设计是汽车测速,所以我还是选用了方案一中AT89C2051单片机,选用AT89C2051是因为价格便宜、低功耗。
(5)转速测量方法与论证
方案一:测周法是测量两个脉冲之间的时间,换算成周期,从而得到频率。测出产生N个脉冲内所需要的时间t,则信号的周期为tNf/,测量频率误差2/ttNf,误差主要来自采样的时间误差,低频脉冲情况下误差较小,测量精度高。
方案二:测频法是测量单位时间内的脉数,换算成频率。在设定t 时间内,测量产生N个脉冲,则信号的周期为/fNt,测量频率误差/fNt,误差主要来自脉冲个数正负一个计数误差,高频脉冲情况下误差较小,测量精度高。
方案比较:由于两个方案都产生的误差,但是方案一中的时间误差,而本设计是汽车测速要测得是时刻速度,故选择方案二。
3、总体硬件设计
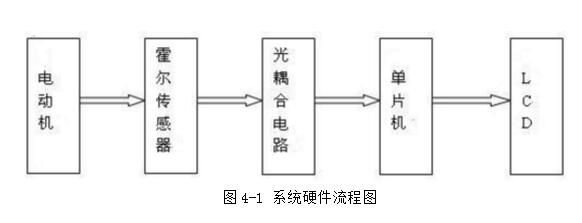
3.1、硬件流程图
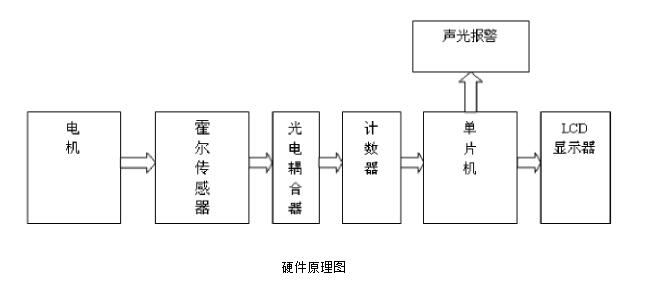
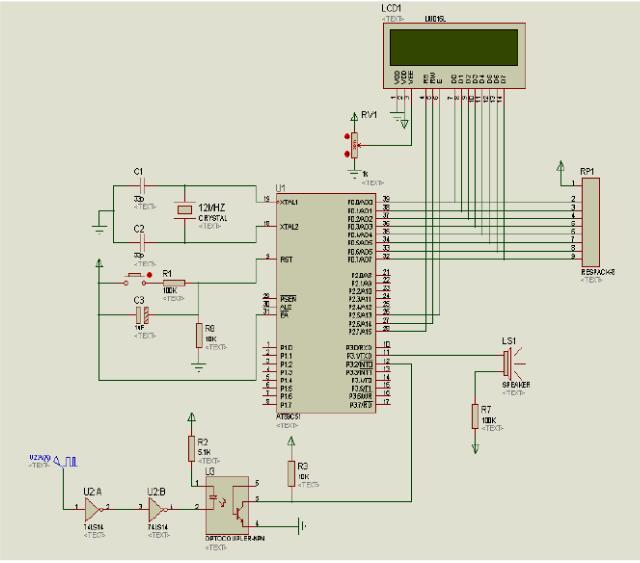
基于霍尔传感器的速度测量系统工作过程是:测量转速的霍尔传感器和机轴同轴连接,机轴每转一周,产生一定量的脉冲个数,由霍尔器件电路部分输出。经光电耦合后,成为转速计数器的计数脉冲。保持同89C2051逻辑电平相一致。控制计数时间,即可实现计数器的计数值对应机轴的转速值。CPU将该值数据处理后,在LCD上显示出来。以单片机AT89C205l为控制核心,用霍尔集成传感器作为测量转速的检测元件,最后用液晶显示器1602显示的机车转速的方法,系统硬件原理图如图4-1所示。
3.2、硬件电路设计
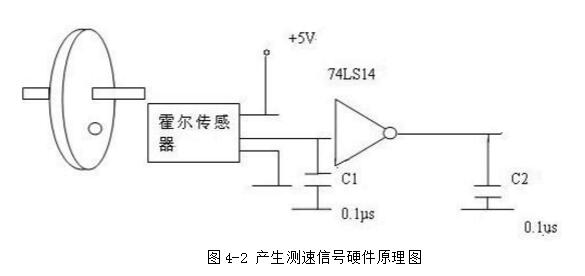
(1)通过霍尔传感器产生脉冲信号,并经过74LS14进行放大,硬件电路图如图4-2所示:
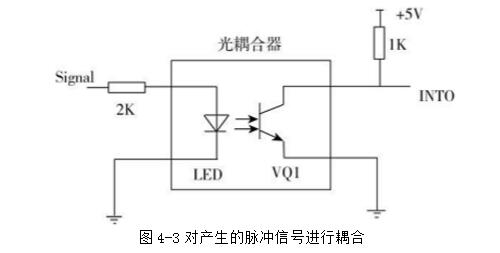
(2)将产生的脉冲信号进行耦合处理。其中Signal代表脉冲信号,脉冲信号通过光电耦合器将其转换为单片机可采集的5V脉冲信号,如图4-3所示。
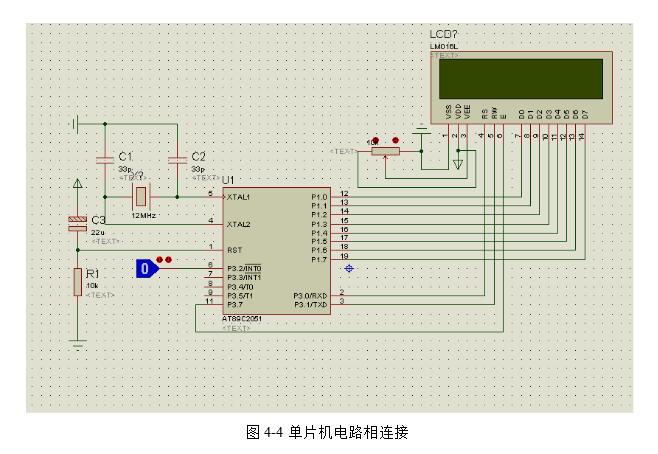
(3)将耦合处理后的信号介入单片机中0点位置如图4-4所示。
霍尔传感器测速电路设计方案(二)
首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。
其次设计一个单片机小系统,利用单片机的定时器和中断系统对脉冲信号进行测量或计数。
再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。要求霍尔传感器转速为0~5000r/min。
1、霍尔测速模块论证与选择
采用霍尔传感器;选型号为CHV-25P/10的霍尔传感器,其额定电压为10v,输出信号5v/25mA,电源为12~15v。体积大,价格一般为40~120元之间不等。性价比较高
2、计数器模块论证与选择
采用片内的计数器。其优点在于降低单片机系统的成本。每到一个脉冲将会产生一个T1的计数,在T0产生的100ms中断完成后,T1的中断溢出次数就是所需要计的脉冲数。特点在于:使用了内部的T1作为外部脉冲的计数器,并且,为了避免计数器的溢出,将T1的初值设为0。
3、显示模块论证与选择
采用LCD液晶显示器作为显示模块核心。LCD显示器工作原理简单,编程方便,节能环保。
4、报警模块论证与选择
采用蜂鸣器与发光二极管作为声光报警主要器件。该方案不论在硬件和焊接方面还是在编写软件方面都简单方便,而且成本低廉。
5、电源模块论证与选择
采用交流220V/50Hz电源转换为直流5V电源作为电源模块。 该方案实施简单,电路搭建方便,可作为单片机开发常备电源使用。
6、单片机模块论证与选择
选用 P89C51的单片机速度极快、功耗低、体积小、资源丰富,有各种不同的规格,最快的达100MPS ,引脚还可编程确定功能
选用51系列的单片机,是因为51的架构十分典型。而且: 1.价格便宜; 2.开发手段便宜; 3.自己动手焊接相对容易。
7、转速测量方案论证
转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法)、T法(测周期法)和MPT法(频率周期法),该系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。
8、电机轴一侧贴磁片
使用霍尔传感器获得脉冲信号,其机械结构也可以做得较为简单,只要在转轴的圆周上粘上一粒磁钢,让霍尔开关靠近磁钢,就有信号输出,转轴旋转时,就会不断地产生脉冲信号输出。如果在圆周上粘上多粒磁钢,可以实现旋转一周,获得多个脉冲输出。在粘磁钢时要注意,霍尔传感器对磁场方向敏感,粘之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试
9、硬件设计
基于霍尔传感器的速度测量系统工作过程是:测量转速的霍尔传感器和机轴同轴连接,机轴每转一周,产生一定量的脉冲个数,由霍尔器件电路部分输出。经光电耦合后,成为转速计数器的计数脉冲。同时传感器电路输出幅度为12v的脉冲经光电耦合后降为5v,保持同89C51逻辑电平相一致。控制计数时间,即可实现计数器的计数值对应机轴的转速值。CPU将该值数据处理后,在LCD上显示出来。一旦超速,CPU通过喇叭和指示灯发出声、光报警信号。
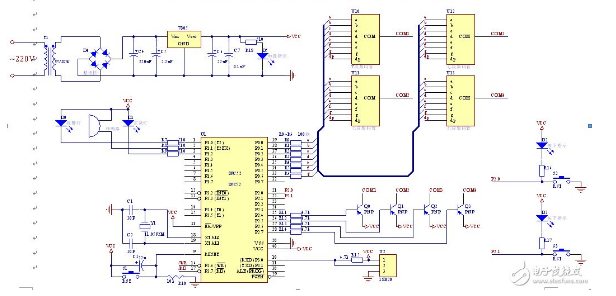
10、硬件原理图
以单片机AT89C5l为控制核心,用霍尔集成传感器作为测量转速的检测元件,最后用字符型液晶显示器1602(HD44780控制)显示的小型直流电动机转速的方法,是数字式测量方法,智能化微电脑代替了传统的机械式或模拟式结构。系统硬件原理图如图所示。
硬件电路设计总图
在原理图基础上对各部分进行了详细的设计,硬件电路图如图所示:











 工商网监
工商网监
评论