 电子发烧友App
电子发烧友App


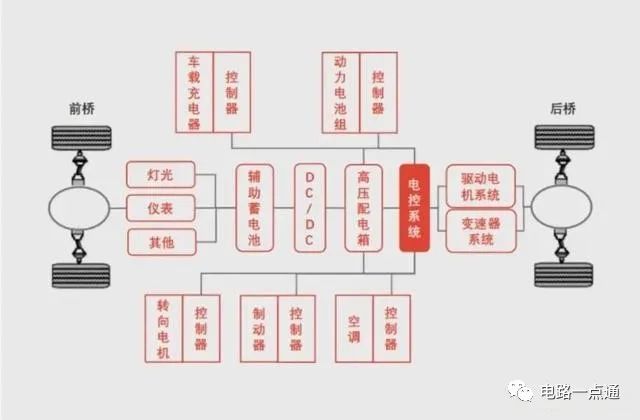
车辆的数据网络包括有关转向角及轮速的实时传感器数据。根据该信息,配备前大灯的自适应转向大灯系统能够使光线的分布与车辆的转向角相适应,以便于迎面而来的转弯和岔路口—尤其是司机的凝视点—能够得到最佳的照明。
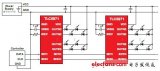
每台车辆前大灯的转动都是通过使用步进电机而实现的,其中,一台步进电机控制垂直方向上的转动,另一台用于控制水平方向上的转动(见下图)。电机根据车辆四周的许多传感器反馈的数据作出反应。信息的传达是通过车辆的数据网络系统实现的。LIN总线是前大灯控制的一个实用的选择,而CAN总线则能够将传感器数据收集起来并且分配到整个车辆。步进电机是前大灯调节应用的一个最佳选择,因为这些电机成本低,坚固耐用,体型虽小却能够提供一个很大的扭矩。

图1
以下提出一种新的高功率因数非隔离LED驱动电路,组合了逐流式功率因Buck-boost开关电源电路电路结构简单,同时满足LED驱动电源的高功率因数,高效率,符合电磁兼容EMC标准,高电流控制精度,高可靠性、体积小、成本低等一系列要求。
AP3766是BCD公司最新推出的LED专用驱动控制芯片,采用原边调整控制(PSR)技术实现高精度的恒压/恒流(CV/CC)输出,省去了副边光耦及恒压恒流控制电路,也不需要环路补偿电路实现了电路的稳定控制,并且采用SOT-23-6 小体积封装,显着缩小系统体积,降低了系统成本。AP3766具有“亚微安启动电流”专利技术,降低了系统功耗,提升了效率。能够使得效率大于80%,空载功耗小于30mW. AP3766内置外部元件温度变化补偿及恒流CC收紧技术实现垂直的CC特性,保证了量产情况下±5%的输出恒流精度。同时,AP3766内置软启动,过压保护,短路保护功能,提高了系统可靠性。
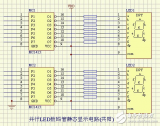
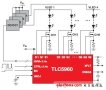
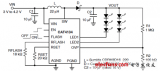
图2为AP3766的管脚图。

图2. AP3766的管脚图
电路原理图
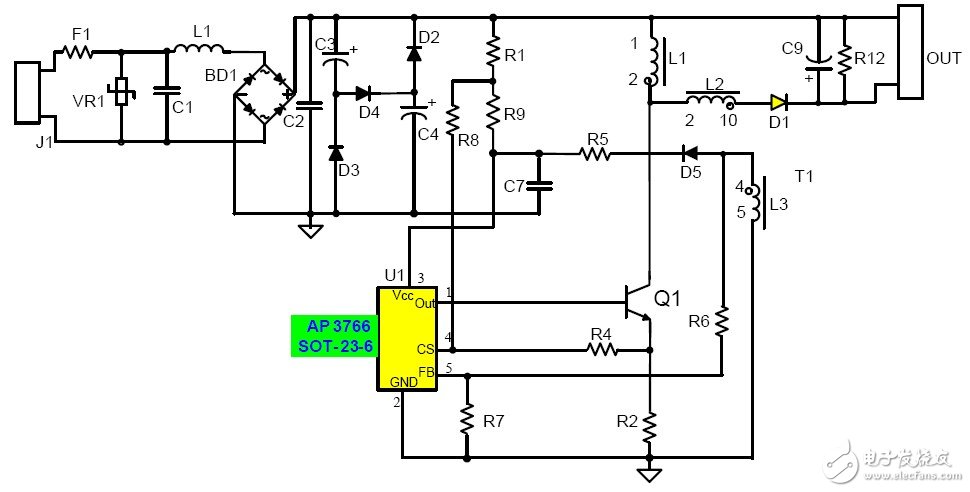
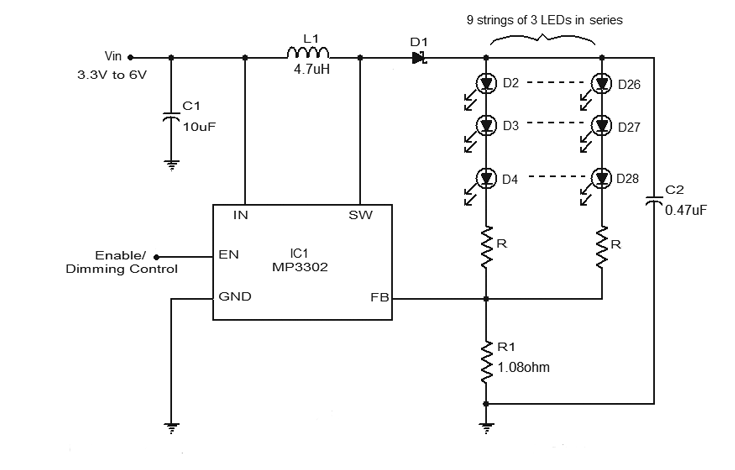
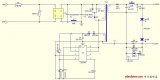
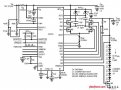
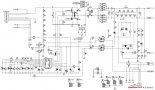
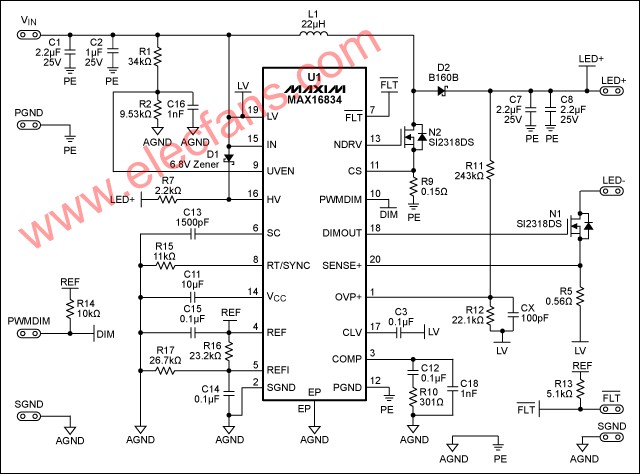
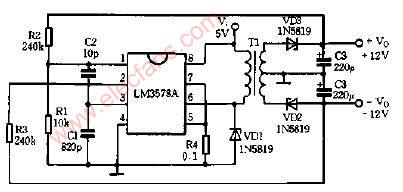
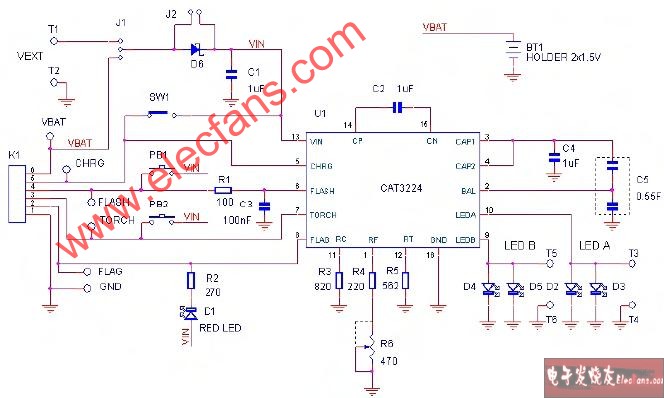
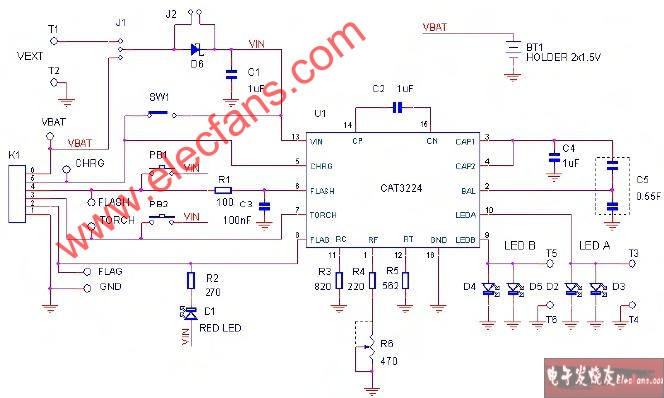
图3. 基于AP3766的高功率因数非隔离LED驱动电路原理图
图3中F1为保险丝,C3,C4,D2,D3,D4构成一个逐流式电路实现功率因数校正功能。逐流式电路提高整流电路功率因数的原理在于增大了整流电路的导通角,在输入交流电压大于峰值电压一半时,整流桥BD1就能导通,避免了传统不控整流电路只在交流电压峰值附近才能瞬间导通导致大的电流尖峰和波形畸变问题,从而降低了总谐波失真度,即THD.
经过逐流式电路后,由L1,L2,Q1,D1,C9构成的Buck-boost开关电源电路完成升降压和恒流输出功能,控制芯片U1实现Buck-boost开关电源电路的开关控制功能。电感L1, L2,L3通过磁芯T1相互耦合。
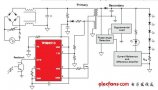
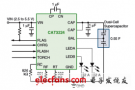
采用原边开关控制方式的Buck-boost开关电源电路工作原理是:设定在一个开关周期内,输出二极管D1的导通时间为Tons,关断时间为 Toffs,输出电流峰值为Ipk,耦合电感L1绕组匝数N1, 耦合电感L2绕组匝数N2.控制芯片U1控制开关占空比,保持输出二极管D1的导通时间Tons和关断时间Toffs比例恒定,则一个开关周期内,输出电流的平均值为:
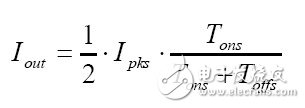
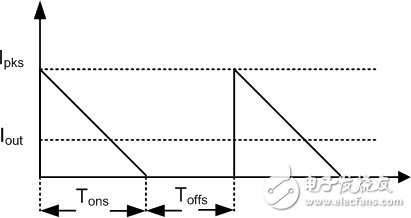
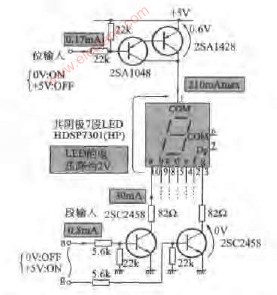
图4 二极管D1的电流波形
编辑点评:本文简单介绍了车载LED驱动器的电路设计,一种新的高功率因数非隔离LED驱动电路,组合了逐流式功率因Buck-boost开关电源电路电路结构简单,同时满足LED驱动电源的高功率因数,高效率,符合电磁兼容EMC标准,高电流控制精度,高可靠性、体积小、成本低等一系列要求。
电子发烧友《智能医疗特刊》,更多优质内容,马上下载阅览














 工商网监
工商网监
评论