 电子发烧友App
电子发烧友App


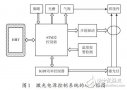
在一些电源控制应用中,基于可靠性或安全性的原因,需要对阻性电源负载的工作状态进行连续的评估。医疗设备中使用的发热电阻就是这种应用的很好例子。为了有效果,评估时应采用连续监视电源负载电阻的方式,并且不能干扰系统的正常工作。监视系统应提供至少一个数字告警信号,该信号需要在阻值超过预设范围时被激活。
带简单的电阻性负载电流监视功能的典型电源控制应用可以如图1所示那样建模,其中忽略了任何感抗现象。在这种集总模型中,U是供电电压;I是电路中的电流;R是电源负载(纯阻性);Rp1、Rp2和Rp3代表所有寄生电阻,建模的是互连走线、连接器和任何可能的机械或电子开关(闭合时)的电阻;Rs是电流检测电阻。设Rp是总的寄生电阻,定义为Rp = Rp1 + Rp2 + Rp3。如果U和Rp是常数,那么I在R改变时才会改变,因为Rs是常数。因此评估R的偏差只需要监视电流即可。然而在大多数情况下,实际的U和Rp不是固定不变的。事实上,即使在常见的恒压PWM电源控制应用中,U也可能因为电源过高的内部阻抗(不良调整)和/或电压容差而偏离期望值。寄生电阻Rp包含导线、连接器和开关的电阻,它们通常会因温度、用途和老化的原因而发生变化。举例来说,如果开关是功率MOSFET实现的,那么由于它具有正温度系数,它的Rds(ON)会随温度的上升而增加。

图1 带简单的阻性负载电流监视功能的典型电源控制应用。
很明显,U和Rp的变化将影响基于电流的简单电阻监视方法的精度。为了克服这个问题,可以在计算实际负载电阻(R)的基础上进行电阻监视,方法是测量负载电流和负载电压,然后根据欧姆定律计算它们相除的结果。现在典型的方法是在数字域中做这种除法,它要求至少一个带两个复用输入通道的模数转换器(ADC)和一些处理单元(即微控制器)。这种方法很有吸引力,特别是当系统中已经有微控制器的时候。然而,由于可靠性或安全方面的原因,用软件完成计算任务的这种方法可能行不通,或者根本不可取。
例如在医疗级设备中,标准IEC 60601-1(条款14)规定,如果由可编程系统来确保至关重要的安全性,那么开发周期必须遵循规定的程序,这将使最终系统的开发和随后的认证进一步复杂化。另外一种方法是在模拟域中执行除法操作,方法是使用精密的模拟分压集成电路(IC)。然而,这种IC一般很昂贵,而且不很常见。不过在模拟域中,我们可以利用经典的惠斯通电桥——在低功耗电阻测量中一种很著名的电路。它将是我们讨论的起点。
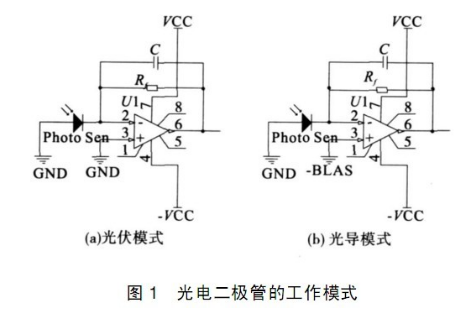
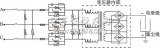
在展开讨论之前,最好是将R定义为R = Rn(1+δ),其中Rn是R的归一化值,δ是R的相对误差,定义为δ = R/Rn – 1。另外,让我们将阈值点δi 和δs定义为监视系统启动故障条件信号点之外的δ值(分别对应更差和更好)。在图2a)中,惠斯通电桥和比较器用来产生逻辑信号,指示R是大于还是小于某个阈值。很容易表明,这个电阻阈值独立于U,它是这种电桥拓扑的一个特性。在图2 b)中,通过在参考支路和两个比较器中使用一个额外的电阻(R3),可以扩展拓扑,实现阻值窗口比较器。阈值点δi 和δs由R1、R2和R3之间的比值设定,因为它们确定了比较器(Ut1和Ut2)的阈值电压。

图2 惠斯通电桥拓扑。
虽然图2 b)所示电路的阈值点独立于U,但它们仍然受电源分支(图1中所示)寄生电阻的影响。另外,比较器的共模和差分输入电压通常很小(R 》》 Rs)。事实上,期望的差分输入电压范围与比较器的输入偏移电压(IOV)通常是相当的,因此会严重影响监视系统的精度。
解决方案的通用模型
为了克服Rp依赖性,我们可以将电流与负载电压进行比较,而不是将电流与供电电压U 进行比较。此外,我们可以在比较器之间进行适当的电压调整,以克服比较器上很小的差分输入电压引起的参考精度损失问题。这种解决方案的通用模型见图3,它包括寄生电阻Rp1、Rp2和Rp3。在这个模型中,负载电压和负载电流(表示为Rs上的电压)在施加到比较器COMP1和COMP2输入端之前先被同相增益级电路所调整。这些增益级电路总是用运放(OPAMP)和增益确定电阻实现。
需要注意的是,只有当这种运放的IOV范围比比较器的IOV更窄时,才有可能减少由于很小的差分输入电压引起的误差。不过这个条件不难满足,因为精密运放的IOV范围通常都要比精密比较器小,这也是为什么在一些低速高精度应用中将运放用作比较器的原因。

图3:通用模型。
对电流的差分测量可以转换为更简单的单端测量,方法是将Rs下面的端子连接模拟地(电阻监视部分的地)。图3中的新变量被定义为:
假设增益级电路是理想的情况下,图4和图5分别画出了作为δ函数的比较器输入电压(Uu1, Ui1, Uu2, Ui2, Ud1 和Ud2)。在图4中,实线是U=15V时的结果,虚线是U=10V时的结果。Rp值保持不变。从图中可以看出,阈值点(δi和δs)不受U变化的影响。

图4 a)

作图4 b)
在图5中,实线是Rp=10mΩ时的结果,虚线是Rp=200mΩ时的结果。在这两种情况下,U保持不变(U=15V)。从中可以看出,δi 和δs不受Rp变化的影响。

图5 a)

图5 b)
虽然U和Rp的变化不影响δi 和δs,但它们影响比较器的单端和差分输入电压,见图4和图5。因此模型增益的确定应慎重,要确保满足比较器的共模输入电压范围(CMIVR)要求。在这个例子中,假设比较器能够实现接近地电位的检测,也就是说它们的共模输入电压范围可以从0(或以下)扩展到某个正值。在图4 a)和图5 a)中可以看到,在低于和高于δi 与δs时,相关的输入电压(对δi来说是Uu1和Ui1,对δs来说是Uu2和Ui2)呈现相反的趋势。因此,相关输入电压在δi和δs处同时具有最高值,分别是Ut1和Ut2。要想比较器在δi 和δs点提供正确的输出状态,Ut1和Ut2必须在它们的共模输入电压范围之内(CMIVR)。如果是这样,相关输入电压可能在低于和高于δi 和δs时超出CMIVR,因为每个比较器至少有一个输入电压在CMIVR内是有保证的,而且大多数比较器在这种情况下仍能提供正确的输出状态。符合工业标准的LM393就是具有这种能力的一个典型例子。从图4 a)和图5 a)中可以看出,Ut1和Ut2不是固定的,它们会随着U增加和/或Rp减小而增大。
当U位于其最大可能值、Rp位于其最小可能值(在大多数情况下可以认为是0)时,将形成在比较器CMIVR方面最差的工作条件。在计算模型增益时应该将这些U和Rp值代入公式(2)、(3)、(4)和(5)。比较器的输入偏移电压(IOV)有可能导致δi 和δs阈值点偏离期望值,并降低电阻监视的精度。为了尽可能减小这种漂移幅度,我们应该尽可能增加分别对应δi 和δs的Ud1和Ud2斜率模(绝对值),如图4 b)和图5 b)所示。另外观察图4 a)和图5 a)可以看出,通过增加Ut1和Ut2也可以减小这种漂移。考虑到前面讨论的共模输入电压范围(CMIVR)限制,我们可以得出结论:应选择接近 CMIVR上限的Ut1和Ut2电压值,并留一些安全余量应对实际元件的容差和漂移。选好Ut1和Ut2后,就可以将它们与T、Rn、Rs、U (最大值) 和Rp (最小值)一起代入增益公式((2), (3), (4), (5))计算模型增益,完成模型的调整。
相反,当Ud1和Ud2斜率模减小时,由于输入偏移电压(IOV)引起的阈值点漂移将变得更糟,见图4 b)和图5 b)。从这些图还可以看出,这些模值随U的减小和/或Rp的增加而减小。因此最差精度损失发生在最低期望的U值和最高期望的Rp值时。总之,由IOV引起的精度损失行为可以被总结为:针对某个特定的比较器IOV范围,为了满足特定的精度要求,必须重视相应的最小U值和最大Rp值。也可能在一些特殊情况下,U=0和/或Rp → (+∞)。符合这些情况的例子包括U供电电源的关断或故障、保险丝熔断、PWM应用中功率开关的开路等。在发生这些事件时,所有比较器的输入电压将接近于 0,输出信号(Fault)将没有统一的状态。此时Fault应被忽略,或被某些额外的检验电路关闭。













 工商网监
工商网监
评论