 电子发烧友App
电子发烧友App


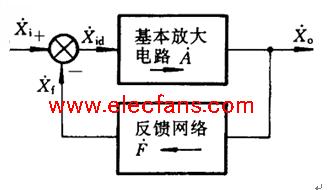
闭环控制是控制论的一个基本概念。指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。在控制论中,闭环通常指输出端通过“旁链”方式回馈到输入,所谓闭环控制。输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。
闭环反馈控制是基于反馈原理建立的自动控制。所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。在闭环反馈控制中,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。闭环反馈控制是自动控制的主要形式。在工程上常把在运行中使输出量和期望值保持一致的闭环反馈控制系统称为自动调节系统,而把用来精确地跟随或复现某种过程的反馈控制系统称为伺服系统或随动系统。
概念
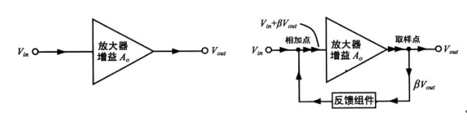
控制过程中,没有反馈环节,不能对控制结果加以修正、调节,是个单程的控制流向。这种控制,称为开环控制。闭环控制有反馈环节,通过反馈系统是系统的精确度提高。开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,试用于对系统稳定性精确度要求不高的简单的系统。闭环反馈控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩短,适合于对系统的响应时间、稳定性要求高的系统。
采用闭环反馈控制,可以有效地抑制被反馈通道(由输出到输入)所包围的前向通道(由输入到输出)中各种干扰对系统输入量的影响,改善了系统的静态准确度。同时,因负反馈的存在,对应于一定输出量的输入量必然加大,使控制器受到强激信号作用,可加快被控对象的输出量对输入量的跟踪速度, 获得快速响应的效果, 改善了系统的动态特性。缺点是如果控制器的强激信号作用与被控对象惯性之间匹配不当,负反馈控制系统内可能产生振荡,甚至不能稳定工作;使用的元件多,线路复杂,系统的分析和设计都比较麻烦;比较被动。

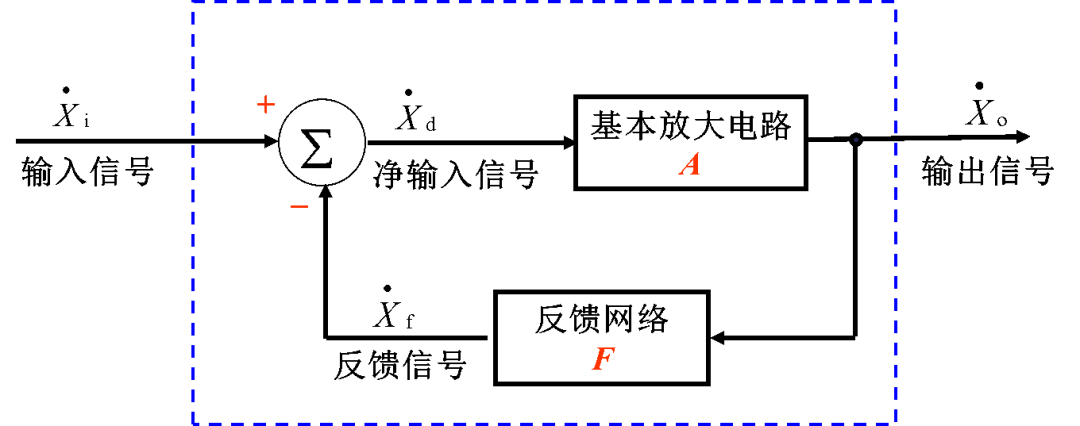
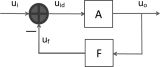
闭环反馈控制原理
当受控客体受干扰的影响,其实现状态与期望状态出现偏差时,控制主体将根据这种偏差发出新的指令,以纠正偏差,抵消干扰的作用。在闭环反馈控制中,由于控制主体能根据反馈信息发现和纠正受控客体运行的偏差,所以有较强的抗干扰能力,能进行有效的控制,从而保证预定目标的实现。管理中所实行的控制大多是闭环控制,所用的控制原理主要是反馈原理。这种控制如果我们把输入值用x表示,输出值用y表示,客体的功能用s表示,控制系统也即反馈系统的作用用R表示,偏差信息用△x表示,则有:y=S(X+△X)=S(X+Ry)=SX+SRy式中R称反馈因子或控制参数,它反映闭环控制系统的反馈功能或控制功能。
分类
负反馈(negative feedback):凡反馈信息的作用与控制信息的作用方向相反,对控制部分的活动起制约或纠正作用的,称为负反馈。意义是维持稳态,缺点是滞后、波动。
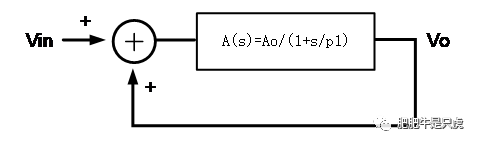
正反馈(positive feedback ):凡反馈信息的作用与控制信息的作用方向相同,对控制部分的活动起增强作用的,称为正反馈。意义:加速生理过程,使机体活动发挥最大效应。
闭环反馈控制把取出的输出量回送到输入端,并与指令信号比较产生偏差的过程。指令信号与被控量相减为负反馈,相加则为正反馈。不做特别说明,一般指负反馈。闭环反馈控制就是采用负反馈并利用偏差进行控制的过程,是自动控制系统中最基本的控制方式。
根据自动控制原理,反馈控制的闭环系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用。
调速系统的转速降落正是由负载引起的转速偏差,显然,引入转速闭环将使调速系统应该能够大大减少转速降落

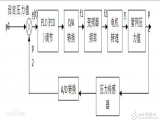
在反馈控制的闭环直流调速系统中,与电动机同轴安装一台测速发电机 TG ,从而引出与被调量转速成正比的负反馈电压Un ,与给定电压 Un 相比较后,得到转速偏差电压 Un ,经过放大器 A,产生电力电子变换器UPE的控制电压Uc ,用以控制电动机转速 n。

在闭环调速系统中,引入转速负反馈的后,当放大系统足够大时,就可以满足系统的稳态性能(静差率)的要求。然而放大系数太大可能引起闭环系统的不稳定,这时应增加动态校正措施,才能保证系统的正常工作。














 工商网监
工商网监
评论