 电子发烧友App
电子发烧友App


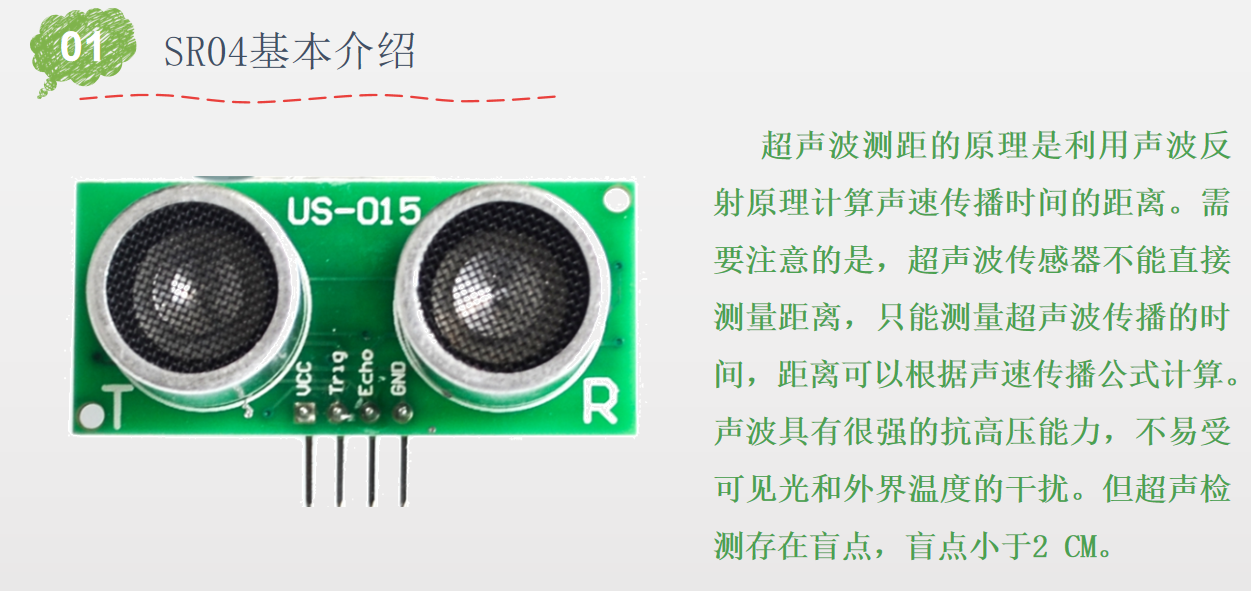
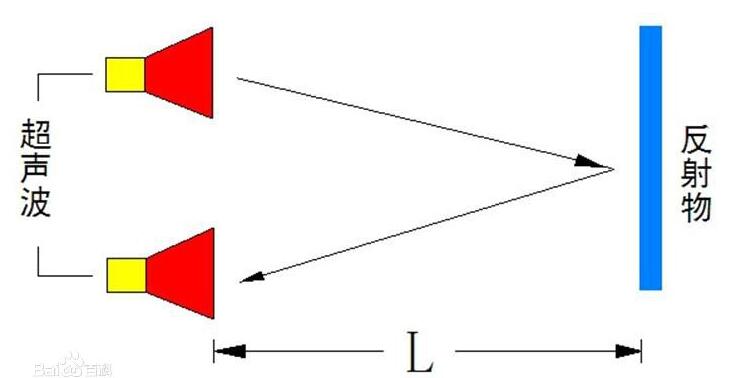
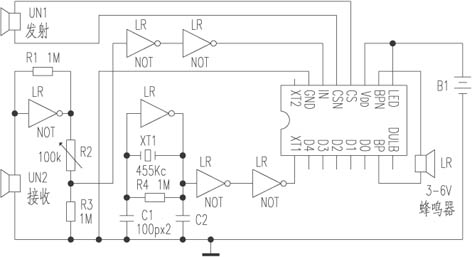
有源超声波测距:
通过发射具有特征频率的超声波对被摄目标的探测,通过发射出特征频率的超声波和反射回接受到特征频率的超声波所用的时间,换算出距离,如超声波液位物位传感器,超声波探头,适合需要非接触测量场合,超声波测厚,超声波汽车测距告警装置等。,如机器人等。
超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间。但是会有一个最小探测盲区,一般在几十毫米。因为声波的特性,所以超声波传感器受环境影响比较小,使用场合比较广泛
有源主动红外测距主动照射并利用目标反射红外源的红外光来实施测距。
如主动红外夜视技术是通过观察的夜视技术,对应装备为主动红外夜视仪。被动红外夜视技术是借助于目标自身发射的红外辐射来实现观察的红外技术,它根据目标与背景或目标各部分之间的温差或热辐射差来发现目标。其装备为热像仪。热成像仪具有不同于其它夜视仪的独特优点,如可在雾、雨、雪的天气下工作,作用距离远,能识别伪装和抗干扰等,已成国外夜视装备的发展重点,并将在一定成度上取代微光夜视仪。但其成本也非常高。
红外夜视技术先后经历了早期的主动红外夜视成像技术和现在的被动红外(热成像)技术。红外探测器最早是用单元探测器,后来为了提高灵敏度和分辩率而发展为多元线列探测器,现已向多元面阵红外探测器发展。也适合机器人应用。如红外测温仪、红外热电视、红外热像仪等等。像红外热电视、红外热像仪等设备应用等。
红外测距速度快,但是太阳光一来你就测不准了,我们曾经做过一个避障小车,室内效果很好,拿到室外直接就不跑了,反而是有障碍物的时候才跑。
原理居然是这样!因为红外测距的原理是,一个红外LED发光,然后另外一个红外接收管测红外光的强度!太阳光一来光线强度直接就最大了,然后有障碍物之后光强才会变低。在室内光线强度和距离成正比,在室外有点成反比,所以程序就跑不对了。
另外红外还有一个缺点,就是不同的面返回的光线强度不一样,黑色返回的数据要比白色底许多,所以光线强度和距离不一定完全成正比,材料一换,对应的关系也就换了。
超声波测距精度比较低,现在很少使用。
红外测距技术的原理是利用的是红外线传播时的不扩散原理
因为红外线在穿越其它物质时折射率很小
所以长距离的测距仪都会考虑红外线
而红外线的传播是需要时间的
当红外线从测距仪发出碰到反射物被反射回来被测距仪接受到
再根据红外线从发出到被接受到的时间及红外线的传播速度就可以算出距离
红外测距的优点是便宜,易制、安全、精度高、缺点是距离近。
超声波测距也有许多缺点。
最大的一个缺点就是慢,如果你要测3米的距离,先不考虑声波能不能传回来,首先3*2/340就超过10ms了,距离再远一点就没法测了,声音传不回来。
其次还有一个缺点就是必须是平面,请自行脑补45度面接收到声音之后打到一边的场景。
最后再来一个缺点,不能同时检测,因为声音是可以互相干扰的,只能轮询,一个接一个去检测。
两种比较:
1,两种方式在应用上目标精度高,成本高是可想而知的,
2,相对而言,红外方式价格低,但测量距离相对较短。
红外线抗干扰性太差了,不是不推荐,而是不具备实用性。在12米范围内,超声波测距即使存在种种问题,但总目前已知的所有检测技术中最可靠的,这个问题我已研究了七年。但12米以上测距则要另当别论,这时您就要考虑微波了,12-20米测距,超声波与微波两者各有千秋。20米以上建议不要考虑超声波了(仅空气中,水下检测除外还得以超声波为主)。若需要精确的方向定位,这时您还要考虑一下激光。










 工商网监
工商网监
评论