 电子发烧友App
电子发烧友App


逻辑1
逻辑2
D O
D O
A1 to A2_1
A1 to A2_2
A1
A2
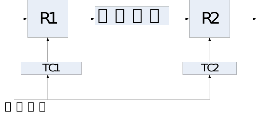
图5-12 TPTHRU约束示例场景
INST“ A1” TNM =“ S”;
INST“ A2” TNM =“ E”;
NET“ A1toA2_1” TPTHRU =“ M”;
TIMESPEC“ SME” = FROM“ S” THRU“ M” TO“ B” 10;
其中第三句指令利用TPTHRU 定义了中间点“M”,然后第4 句在此基础上定义了通过M 点的整条路径,从两条平行的路径中挑出了期望路径。
4.局部约束
局部约束包括FROM_TO 约束、最大延时约束、最大偏移约束、虚假路径、系统时钟抖动约束、多周期路径和多时钟域约束等。在实际开发中,正如本章前沿所述,时序是设计出来,而不是靠约束自动得到的,因此这里不再对局部约束作过多讨论。


















 工商网监
工商网监
评论