 电子发烧友App
电子发烧友App


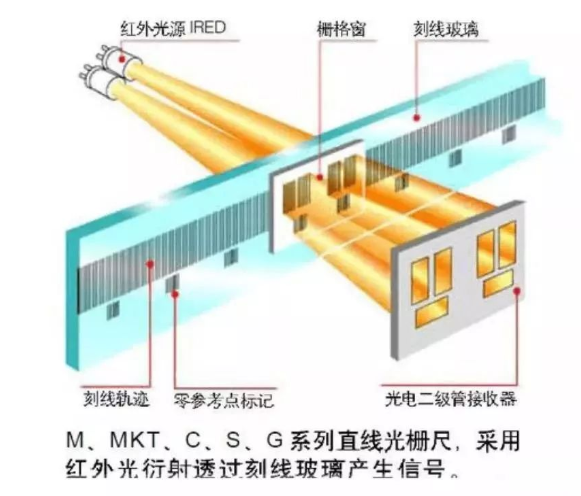
光栅尺,也称为光栅尺位移传感器(光栅尺传感器),是利用光栅的光学原理工作的测量反馈装置。光栅尺经常应用于数控机床的闭环伺服系统中,可用作直线位移或者角位移的检测。其测量输出的信号为数字脉冲,具有检测范围大,检测精度高,响应速度快的特点。例如,在数控机床中常用于对刀具和工件的坐标进行检测,来观察和跟踪走刀误差,以起到一个补偿刀具的运动误差的作用。
光栅尺结构
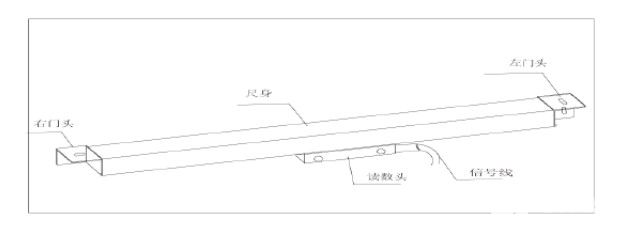
光栅尺是由标尺光栅和光栅读数头两部分组成。标尺光栅一般固定在机床固定部件上,光栅读数头装在机床活动部件上,指示光栅装在光栅读数头中。下图所示的就是光栅尺的结构。
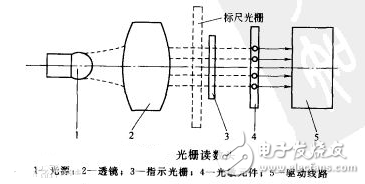
光栅检测装置的关键部分是光栅读数头,它由光源、会聚透镜、指示光栅、光电元件及调整机构等组成。光栅读数头结构形式很多,根据读数头结构特点和使用场合分为直接接收式读数头(或称硅光电池读数头、镜像式读数头、分光镜式读数头、金属光栅反射式读数头)。
光栅尺工作原理
光栅位移传感器的工作原理,是由一对光栅副中的主光栅(即标尺光栅)和副光栅(即指示光栅)进行相对位移时,在光的干涉与衍射共同作用下产生黑白相间(或明暗相间)的规则条纹图形,称之为莫尔条纹。经过光电器件转换使黑白(或明暗)相同的条纹转换成正弦波变化的电信号,再经过放大器放大,整形电路整形后,得到两路相差为90o的正弦波或方波,送入光栅数显表计数显示。
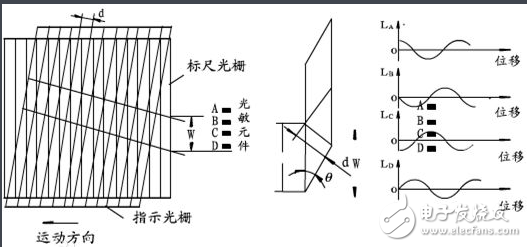
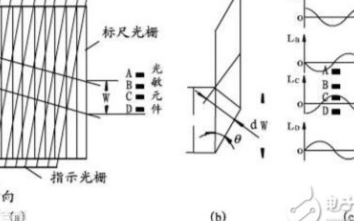
常见光栅的工作原理都是根据物理上莫尔条纹的形成原理进行工作的。下图是其工作原理图。当使指示光栅上的线纹与标尺光栅上的线纹成一角度来放置两光栅尺时,必然会造成两光栅尺上的线纹互相交叉。在光源的照射下,交叉点近旁的小区域内由于黑色线纹重叠,因而遮光面积最小,挡光效应最弱,光的累积作用使得这个区域出现亮带。相反,距交叉点较远的区域,因两光栅尺不透明的黑色线纹的重叠部分变得越来越少,不透明区域面积逐渐变大,即遮光面积逐渐变大,使得挡光效应变强,只有较少的光线能通过这个区域透过光栅,使这个区域出现暗带。这些与光栅线纹几乎垂直,相间出现的亮、暗带就是莫尔条纹。
莫尔条纹具有以下性质:
(1) 当用平行光束照射光栅时,透过莫尔条纹的光强度分布近似于余弦函数。
(2) 若用W表示莫尔条纹的宽度,d表示光栅的栅距,θ表示两光栅尺线纹的夹角,则它们之间的几何关系为W=d/sin当 角很小时,上式可近似写W=d/θ
若取d=0.01mm,θ=0.01rad,则由上式可得W=1mm。这说明,无需复杂的光学系统和电子系统,利用光的干涉现象,就能把光栅的栅距转换成放大100倍的莫尔条纹的宽度。这种放大作用是光栅的一个重要特点。
(3) 由于莫尔条纹是由若干条光栅线纹共同干涉形成的,所以莫尔条纹对光栅个别线纹之间的栅距误差具有平均效应,能消除光栅栅距不均匀所造成的影响。
(4) 莫尔条纹的移动与两光栅尺之间的相对移动相对应。两光栅尺相对移动一个栅距d,莫尔条纹便相应移动一个莫尔条纹宽度W,其方向与两光栅尺相对移动的方向垂直,且当两光栅尺相对移动的方向改变时,莫尔条纹移动的方向也随之改变。
根据上述莫尔条纹的特性,假如我们在莫尔条纹移动的方向上开4个观察窗口A,B,C,D,且使这4个窗口两两相距1/4莫尔条纹宽度,即W/4。由上述讨论可知,当两光栅尺相对移动时,莫尔条纹随之移动,从4个观察窗口A,B,C,D可以得到4个在相位上依次超前或滞后(取决于两光栅尺相对移动的方向)1/4周期(即π/2)的近似于余弦函数的光强度变化过程,用 表示,见图4-9(c)。若采用光敏元件来检测,光敏元件把透过观察窗口的光强度变化 转换成相应的电压信号,设为 。根据这4个电压信号,可以检测出光栅尺的相对移动。
光栅尺的维护
1)尽可能外加保护罩,并及时清理溅落在尺上的切屑和油液,严格防止任何异物进入光栅尺传感器壳体内部。
2)定期检查各安装联接螺钉是否松动、定期使用干燥的洁净布擦拭表。
3)光栅尺位移传感器严禁剧烈震动及摔打、踩踏,以免破坏光栅尺,如光栅尺断裂,光 栅尺传感器即失效了。
4) 不要自行拆开光栅尺位移传感器,更不能任意改动主栅尺与副栅尺的相对间距,否则一方面可能破坏光栅尺传感器的精度;另一方面还可能造成主栅尺与副栅尺的相对摩擦,损坏铬层也就损坏了栅线,以而造成光栅尺报废。
5) 应注意防止油污及水污染、硬物划伤光栅尺面,以免破坏光栅尺线条纹分布,引起测量误差。
6) 光栅尺位移传感器应尽量避免在有严重腐蚀作用的环境中工作,以免腐蚀光栅铬层及光栅尺表面,破坏光栅尺质量。











 工商网监
工商网监
评论