 电子发烧友App
电子发烧友App


DSP的PWM信号
DSP28335共12路16位的ePWM,能进行频率和占空比控制。 ePWM的时钟TBCLK=SYSCLKOUT/(HSPCLKDIV×CLKDIV):

PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。初始化程序采用的计数模式为递增计数模式。在递增计数模式下,时基计数器从零开始增加,直到达到周期寄存器值(TBPDR)。然后时基计数器复位到零,再次开始增加。
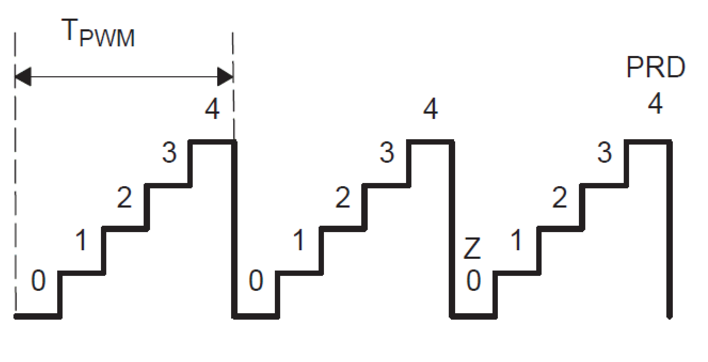
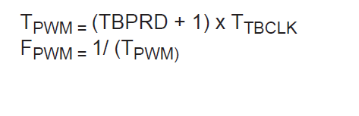
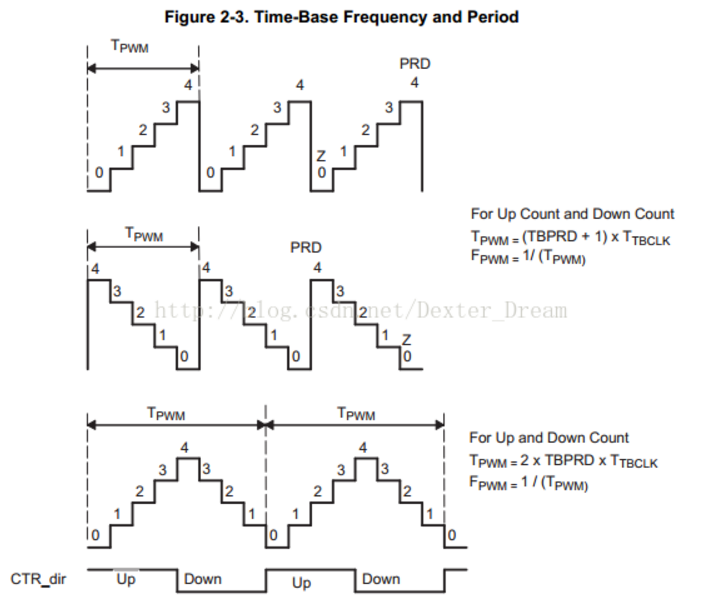
PWM信号周期与频率的计算如下:
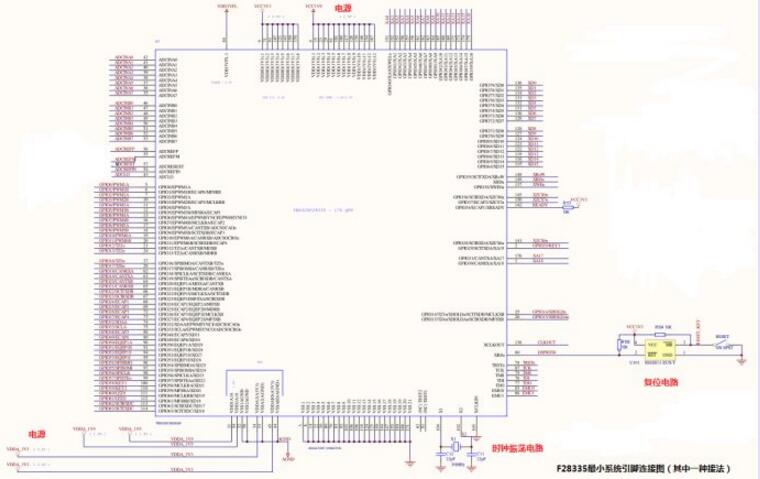
端口对应关系
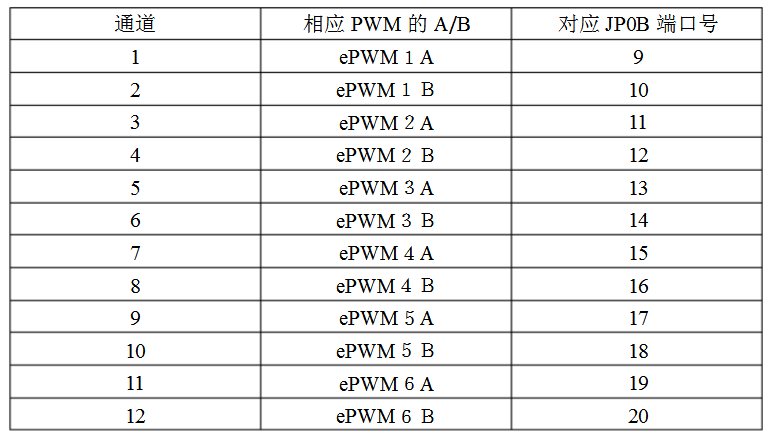
说明:JP0B的端口号按“Z”字形顺序数。
初始化程序注释 void InitPwm1AB(float32 f)
{
Uint16 T= 2343750/f-1.0;//系统时钟SYSCLKOUT=150MHz,
TBCLK=6.6666667ns,在连续增计数模式下,f=150000000/(TBPDR+1)
EALLOW;
//先初始化通用输入输出口//
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 0;
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 0; GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;
EPwm1Regs.TBPHS.half.TBPHS = 0; // 在相位寄存器中设置计数器的起始计数位置
//下面两条语句组合对PWM的时钟进行分频
EPwm1Regs.TBCTL.bit.CLKDIV = 6;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0;
EPwm1Regs.TBPRD = T; //在周期寄存器中设置计数器的计数周期
//TBCTL为定时器控制寄存器
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; //设置计数模式位为连续增计数模式,产生对称方波
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // 将定时器相位使能位关闭
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;//映射寄存器SHADOW使能并配置映射寄存器为自动读写
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // 定时器时钟源选择,一共有四种时钟源
EPwm1Regs.CMPA.half.CMPA= 0.0001*T;// 设置EPWM1A比较值寄存器的比较值,即体现EPWM1A的占空比
EPwm1Regs.CMPB= 0.0001*T;
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;//A模块比较模式 EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;//B模块比较模式 EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // A模块比较使能,
通过写0来清除SHDWAMODE位来使能load on CTR=Zero
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // B模块比较使能,
通过写0来清除SHDWBMODE位来使能load on CTR=Zero
//AQCTLA为输出A比较方式控制寄存器
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET; // TBCTR(计数器)计到零时使输出为反向
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;//TBCTR(计数器)与CMPA在up计数时相等使输出为high,这关系的输出的占空比
EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EDIS;
}
Dsp28335 - ePWM - 50Hz小舵机的控制 - 代码例程
使用dsp28335控制舵机,使用pwm信号。
28xx设置的sysclk为150MHz,大家用的时候主频一定要搞清楚,看看底层代码,ti的数据手册虽然是英文的但是看起来很容易,配置起来也很简单无脑。
初始化不多说,这里我用的pwm只是用的最基本功能,dsp中的ePwm模块的功能非常强大,很多功能我都使用不到,有需要的可以针对性的看下。
void InitEPwm3Gpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO4 = 0; // Enable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 0; // Enable pull-up on GPIO5 (EPWM3B)
/* Configure ePWM-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be ePWM3 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1; // Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1; // Configure GPIO5 as EPWM3B
EDIS;
}
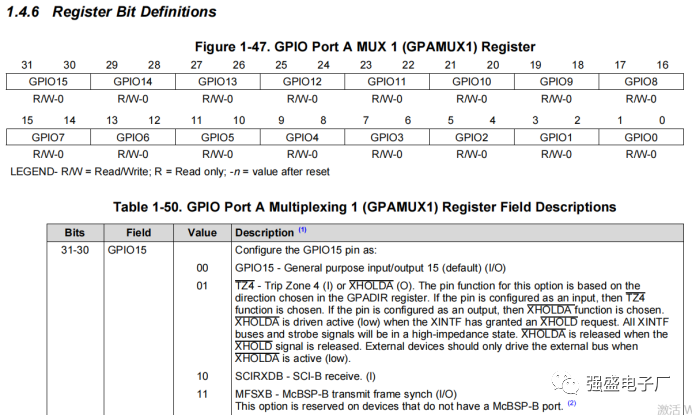
这里使用的是GPIO4和GPIO5,其他引脚同理。为了提高驱动能力使用Pullup模式。
设置Mux寄存器为1选择ePWM功能。
void EPwmSetup(void)
{
InitEPwm3Gpio();
EPwm3Regs.TBSTS.all=0;
EPwm3Regs.TBPHS.half.TBPHS=0;
EPwm3Regs.TBCTR=0;
//EPwm2Regs.CMPCTL.all=0x50; // Immediate mode for CMPA and CMPB
EPwm3Regs.CMPCTL.bit.SHDWBMODE = 0x0;
EPwm3Regs.CMPCTL.bit.SHDWAMODE = 0x0;
EPwm3Regs.CMPCTL.bit.LOADBMODE = 0x0;
EPwm3Regs.CMPCTL.bit.LOADAMODE = 0x0;
EPwm3Regs.CMPA.half.CMPA = 6250;
EPwm3Regs.CMPB=3125;
//EPwm3Regs.AQCTLA.all=0x60; // EPWMxA = 1 when CTR=CMPA and counter inc
// EPWMxA = 0 when CTR=CMPA and counter dec
EPwm3Regs.AQCTLA.bit.CBD = 0x0;
EPwm3Regs.AQCTLA.bit.CBU = 0x0;
EPwm3Regs.AQCTLA.bit.CAD = 0x0;
EPwm3Regs.AQCTLA.bit.CAU = 0x1;
EPwm3Regs.AQCTLA.bit.PRD = 0x0;
EPwm3Regs.AQCTLA.bit.ZRO = 0x2;
//EPwm3Regs.AQCTLA.all = 0x0012;
EPwm3Regs.AQCTLB.bit.CBD = 0x0;
EPwm3Regs.AQCTLB.bit.CBU = 0x1;
EPwm3Regs.AQCTLB.bit.CAD = 0x0;
EPwm3Regs.AQCTLB.bit.CAU = 0x0;
EPwm3Regs.AQCTLB.bit.PRD = 0x0;
EPwm3Regs.AQCTLB.bit.ZRO = 0x2;
//EPwm3Regs.AQCTLB.all = 0x0102;
EPwm3Regs.AQSFRC.bit.RLDCSF = 0x0;
EPwm3Regs.AQCSFRC.all=0x0;
EPwm3Regs.DBCTL.all=0x0;
EPwm3Regs.DBRED=0;
EPwm3Regs.DBFED=0;
EPwm3Regs.TZSEL.all=0;
EPwm3Regs.TZCTL.all=0;
EPwm3Regs.TZEINT.all=0;
EPwm3Regs.TZFLG.all=0;
EPwm3Regs.TZCLR.all=0;
EPwm3Regs.TZFRC.all=0;
EPwm3Regs.ETSEL.all=0; // Interrupt when TBCTR = 0x0000
EPwm3Regs.ETFLG.all=0;
EPwm3Regs.ETCLR.all=0;
EPwm3Regs.ETFRC.all=0;
EPwm3Regs.PCCTL.all=0;
EPwm3Regs.TBPRD=62499;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 0x2;
EPwm3Regs.TBCTL.bit.CLKDIV = 0x2;
EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x6;
EPwm3Regs.TBCTL.bit.SYNCOSEL = 0x3;
EPwm3Regs.TBCTL.bit.PRDLD = 0x0;
EPwm3Regs.TBCTL.bit.PHSEN = 0x0;
EPwm3Regs.TBCTL.bit.CTRMODE = 0x0;
}
模块的初始化
1、注意TBxxx的寄存器控制的是ePWM模块的时钟源,还有外部事件发生的载入计数值以及周期寄存器值,这里我只指出常用的寄存器。这里要根据自己的主频来,我用的是推荐的最高主频150MHz,还有一点要注意的是在UpCount和DownCount的计数方式下PWM周期为(TBPRD+1)*Ttbclk
//3.125MHz.//period 62500.//1ms-》3125.//2ms-》6250
这里自己一定要算清楚,以上几个数据分别是在150MHz主频下此代码产生的1/Ttbclk、周期寄存器值、1ms对应的CMP寄存器值和2ms对应的CMP寄存器值。
2、CMPxxx控制的是与CTR计数器作比较的寄存器值,还有几个控制寄存器。其中需要注意的是dsp的pwm和其他mcu一样为了保护周期信号的完整性采用的缓冲格式,具体的是它成为“shadow”的一种模式,可以使能,也可以不使能。因为控制的是舵机,必须保证信号的周期是完整的20ms,所以选择shadow模式。主要是CMP比较寄存器值的shadow模式,因为周期Period寄存器20ms是固定不变的,设置不设置的无所谓了。
3、AQCTLA和AQCTLB寄存器主要控制的是事件发生时的电平变化情况,这两个寄存器根据自己的需要可以有很多不同的配制方法,是产生电平变化主要要配置的。PWMxA和PWMxB之间使用共同的PRD、CMPA、CMPB以及一些外部事件,这里我不需要那么复杂,只需要两路PWM既可以。
4、剩下几个模块有死区延迟、斩波处理pwm、强制转换电平、pwm中断几种,根据自己的需要再去看吧,控制舵机是完全用不上了。修改占空比只需要
EPwm3Regs.CMPA.half.CMPA = 6250;
EPwm3Regs.CMPB=3125;
改变这两个寄存器。至于为什么CMPA的寄存器和CMP不同,看看底层就明白了,因为CMPA是32位的,其中还有16位是用来组合在HRPWM模块中使用的。










 工商网监
工商网监
评论