 电子发烧友App
电子发烧友App


运动控制器的工作原理及应用
我们以运动控制器在数控系统中的应用及工作原理来详解。
传统的数控机床的控制方式主要有继电器控制、单片机控制与PLC控制几类。现阶段数控系统逐渐向开放性的趋势发展,继电器,PLC和单片机的扩展性和可移植性都比较差,不能够满足数控系统的发展要求。近年来,运动控制器得到了广泛的应用,它具有开放性好、可移植性好、可靠性高、控制功能强、体积小且性价比高等诸多优点,经过发展,运动控制器几乎应用于所有的工业企业中。运动控制器既可以应用于传统机床的数控化改造,也可以应用于新型数控机床的设计,降低成本、节约能源并且提高效率。本文以机械手的控制系统为例,介绍了基于运动控制器的数控系统设计。
1、数控系统总体方案
如图1所示,整个数控系统由硬件和软件两部分组成,硬件部分又分为控制系统硬件和电气控制柜。控制系统硬件包括运动控制器、I/O(输入/输出)接口、驱动模块和执行模块,这部分是数控系统硬件的核心部分;电气控制柜由动力电路、控制电路和信号指示电路等组成。由于现有的运动控制器体积较小,集成度较高,也可以直接将其放置于电气控制柜中。数控系统的软件编写与硬件有一定的关系,一般运动控制器和触摸屏等都会提供编程工具与编程语言,用户根据不同需求使用所提供的编程工具与编程语言进行软件设计。
2、机械手工作原理

图1 数控系统总体方案图
本文中的机械手指搬运机械手,所要完成的工艺流程一般是将工件从一个指定位置运送到另一个指定位置,机械手工艺流程如图2所示。数控系统在工作之前,机械手位于设定的原点,整个系统有上下左右4个限位开关,分别接入运动控制器中的4个不同输入点。数控系统工作时,机械手由原点向下运动,碰到下限位开关后停止运动,机械手抓取工件,为保证机械手能够可靠的夹紧工件,需使用数控系统延时功能,在夹紧2s后再继续向上运动,其余三方向同理,最后机械手松开工件,放在指定位置。为保证机械手能够可靠的放置工件,使用数控系统延时功能,在松开2s后再继续向上运动,碰到上限位开关后继续向左运动,回到原点后进行下一次抓取与放置。
机械手搬运分为自动和手动两种模式,在自动模式下,无需人为干预,系统全自动运行;在手动模式下,操作者可以根据自己的需求控制机械手的动作。
3、数控系统硬件设计
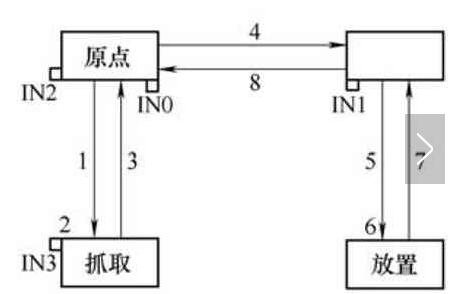
图2 机械手工艺流程图
数控系统硬件主要包括运动控制器、伺服驱动系统、气动夹紧机构、触摸屏以及其他扩展模块和辅助硬件。数控系统硬件设计如图3所示。
(1)数控系统硬件设计。运动控制器选用英国Trio控制器,采用32-bit的120~150MHz的DSP的最新的微处理器技术,融合了最新的控制理论及其网络技术控制。Trio运动控制器提供了丰富的标准接口,例如RS232C、RS485、USB、Ethernet及CAN等,其中RS232C、RS485带有HostLink、Modbus协议,可以和触摸屏直接通讯;Trio运动控制编程语言是一种由Trio自行开发的结构类似于BASIC的语言,其命令就是该运动名称的英文单词。例如:轴就是AXIS,相对移动就是MOVE,绝对运动就是MOVEABS等等。另外,TRIO还提供二次开发使用的ActiveX控件,用户可以根据自身需要利用VB/VC/C++等高级语言进行二次开发。
(2)选用屏通触摸屏,屏通触摸屏采用高彩、高亮度的数字式液晶屏幕,显示效果好、反应快。触摸屏与运动控制器之间通过RS485接口连接,触摸屏可以进行参数的设置与显示。机械手的状态信息通过触摸屏可以直观的显示出来,还可以通过触摸屏上的按钮、数字输入等功能向系统发出指令,对机械手进行控制。
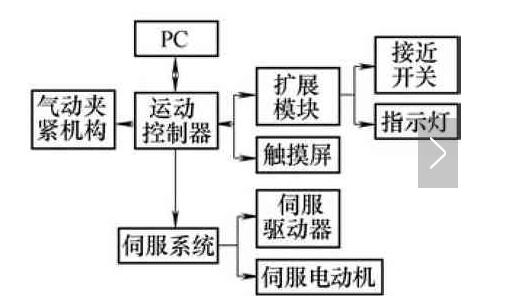
图3 系统硬件设计图
(3)伺服系统选用松下MINAS A5系列伺服系统,包括伺服驱动器和伺服电动机,该伺服系统可以满足高速、高精度和高性能的要求。伺服驱动器和伺服电动机之间通过配套的动力线和编码器线进行连接。在机械手中需要水平和竖直两套伺服系统。水平和竖直方向分别有两个限位开关,用来控制伺服电动机的行程。除此之外,在水平和竖直方向分别有一个回零开关作为基准,用来设置水平和竖直方向的零点。
4、数控系统软件设计
系统软件设计主要包括三大部分,分别为上位机程序设计、控制程序设计与触摸屏程序设计。通过控制程序和触摸屏程序的配合运行,可以实现机械手相应的功能。
(1)软件整体设计。为了保证软件的可靠性与可扩展性,控制程序与触摸屏程序采用模块化设计思想。如图4所示,软件分为管理模块、控制模块和参数模块三大部分。由于运动控制器自身没有操作系统,不具备开发环境,必须通过上位机对其进行开发与管理,所以管理模块在上位机中运行;控制模块在运动控制器中运行,在上位机上编写好的控制程序可以直接传输到运动控制器中,运动控制器根据程序实现相应的功能;参数模块主要用来进行参数的设置与显示,可在触摸屏上运行。通过这样的模块化设计,可以提高系统的响应速度,使系统更加稳定可靠。
(2)部分程序设计。由于运动控制器是基于PC运行的,所以需要开发上位机程序对数控程序进行管理。一般运动控制器都会提供上位机开发的接口。Trio中的Active X控件就是用来与高级语言结合使用的接口,本文中使用VB进行上位机程序编写,直接向工程中添加Active X控件,编程时调用相关函数即可。
控制程序分为两部分,分别为手动控制程序和自动控制程序。在手动控制模式下,机械手主要根据触摸屏上的按钮指令进行运动,各个动作可以单步执行,主要用来进行安装调试与维修等工作;自动控制程序用来控制机械手自动完成工件的搬运工作,程序通过外部状态信息的反馈,按照指定路线进行工件搬运,当出现问题时系统会运行保护程序,防止意外发生,机械手的运行状态和外部反馈信息都会在触摸屏上实时显示。机械手控制流程如图5所示。
触摸屏是人机交互的窗口,触摸屏程序由多个画面组成,通过这种方式来使人机交互更加清晰,避免误操作的发生。触摸屏界面主要有主界面、状态显示界面和操作界面等,其中状态显示界面如图6所示。
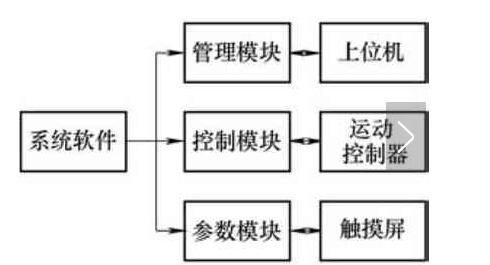
图4 软件整体设计图
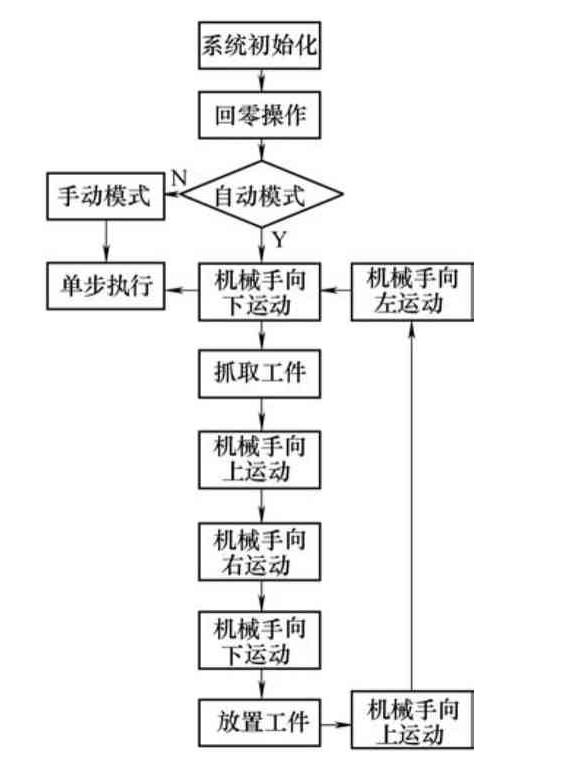
图5 机械手控制流程图
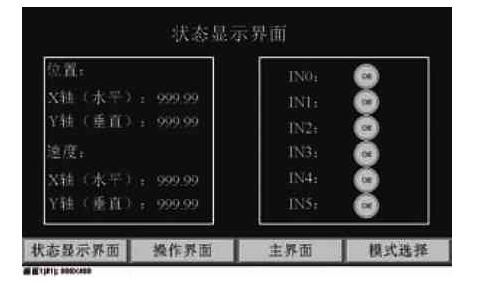
图6 状态显示界面
5、结语
随着工业控制的不断发展,新的控制方式不断出现,相应的数控系统也需要与时俱进。采用运动控制器作为数控系统的核心具有系统简单灵活、硬件少且开放性好的优点。实验结果达到了预期设想,完成了相应功能,证明了系统的可行性。基于运动控制器的数控系统,既可以应用于新数控系统的开发,又可以应用于传统机床的数控化改造,是数控系统发展的新方向。






















 工商网监
工商网监
评论