 电子发烧友App
电子发烧友App


本文主要是关于步进电机的相关介绍,并着重对防止如何步进电机失步的方法进行了详尽的阐述。
步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
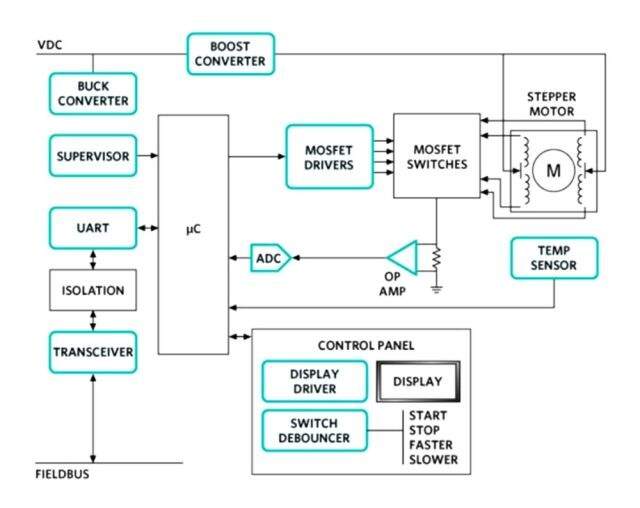
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
主要分类
步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机Permanent Magnet,PM)、混合式步进电机(Hybrid Stepping,HS)、单相步进电机、平面步进电机等多种类型,在我国所采用的步进电机中以反应式步进电机为主。步进电机的运行性能与控制方式有密切的关系,步进电机控制系统从其控制方式来看,可以分为以下三类:开环控制系统、闭环控制系统、半闭环控制系统。半闭环控制系统在实际应用中一般归类于开环或闭环系统中。
反应式:定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
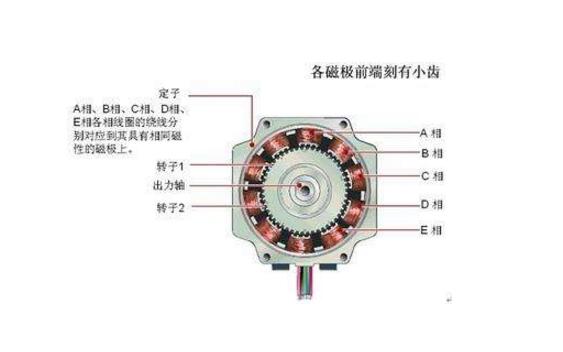
混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
选择方法
步进电机和驱动器的选择方法:
判断需多大力矩:静扭矩是选择步
进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。
选择电机的安装规格:如57、86、110等,主要与力矩要求有关。
确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
根据电机的电流、细分和供电电压选择驱动器。
基本原理
工作原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理
通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
主要构造
步进电机也叫步进器,它利用电磁学原理,将电能转换为机械能,
人们早在20世纪20年代就开始使用这种电机。随着嵌入式系统(例如打印机、磁盘驱动器、玩具、雨刷、震动寻呼机、机械手臂和录像机等)的日益流行,步进电机的使用也开始暴增。不论在工业、军事、医疗、汽车还是娱乐业中,只要需要把某件物体从一个位置移动到另一个位置,步进电机就一定能派上用场。步进电机有许多种形状和尺寸,但不论形状和尺寸如何,它们都可以归为两类:可变磁阻步进电机和永磁步进电机。
步进电机是由一组缠绕在电机固定部件--定子齿槽上的线圈驱动的。通常情况下,一根绕成圈状的金属丝叫做螺线管,而在电机中,绕在齿上的金属丝则叫做绕组、线圈、或相。
步进电机加减速过程控制技术
正因为步进电机的广泛应用,对步进电机的控制的研究也越来越多,在启动或加速时如果步进脉冲变化太快,转子由于惯性而跟随不上电信号的变化,产生堵转或失步在停止或减速时由于同样原因则可能产生超步。为防止堵转、失步和超步,提高工作频率,要对步进电机进行升降速控制。
步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步力矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差十倍之多。
步进电机的起动频率特性使步进电机启动时不能直接达到运行频率,而要有一个启动过程,即从一个低的转速逐渐升速到运行转速。停止时运行频率不能立即降为零,而要有一个高速逐渐降速到零的过程。
步进电机的输出力矩随着脉冲频率的上升而下降,启动频率越高,启动力矩就越小,带动负载的能力越差,启动时会造成失步,而在停止时又会发生过冲。要使步进电机快速的达到所要求的速度又不失步或过冲,其关键在于使加速过程中,加速度所要求的力矩既能充分利用各个运行频率下步进电机所提供的力矩,又不能超过这个力矩。因此,步进电机的运行一般要经过加速、匀速、减速三个阶段,要求加减速过程时间尽量的短,恒速时间尽量长。特别是在要求快速响应的工作中,从起点到终点运行的时间要求最短,这就必须要求加速、减速的过程最短,而恒速时的速度最高。
国内外的科技工作者对步进电机的速度控制技术进行了大量的研究,建立了多种加减速控制数学模型,如指数模型、线性模型等,并在此基础上设计开发了多种控制电路,改善了步进电机的运动特性,推广了步进电机的应用范围指数加减速考虑了步进电机固有的矩频特性,既能保证步进电机在运动中不失步,又充分发挥了电机的固有特性,缩短了升降速时间,但因电机负载的变化,很难实现而线性加减速仅考虑电机在负载能力范围的角速度与脉冲成正比这一关系,不因电源电压、负载环境的波动而变化的特性,这种升速方法的加速度是恒定的,其缺点是未充分考虑步进电机输出力矩随速度变化的特性,步进电机在高速时会发生失步。
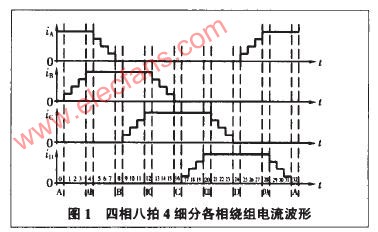
步进电机的细分驱动控制
步进电机由于受到自身制造工艺的限制,如步距角的大小由转子齿数和运行拍数决定,但转子齿数和运行拍数是有限的,因此步进电机的步距角一般较大并且是固定的,步进的分辨率低、缺乏灵活性、在低频运行时振动,噪音比其他微电机都高,使物理装置容易疲劳或损坏。这些缺点使步进电机只能应用在一些要求较低的场合,对要求较高的场合,只能采取闭环控制,增加了系统的复杂性,这些缺点严重限制了步进电机作为优良的开环控制组件的有效利用。细分驱动技术在一定程度上有效地克服了这些缺点。
步进电机细分驱动技术是年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动技术。年美国学者、首次在美国增量运动控制系统及器件年会上提出步进电机步距角细分的控制方法。在其后的二十多年里,步进电机细分驱动得到了很大的发展。逐步发展到上世纪九十年代完全成熟的。我国对细分驱动技术的研究,起步时间与国外相差无几。
在九十年代中期的到了较大的发展。主要应用在工业、航天、机器人、精密测量等领域,如跟踪卫星用光电经纬仪、军用仪器、通讯和雷达等设备,细分驱动技术的广泛应用,使得电机的相数不受步距角的限制,为产品设计带来了方便。目前在步进电机的细分驱动技术上,采用斩波恒流驱动,仪脉冲宽度调制驱动、电流矢量恒幅均匀旋转驱动控制止,,几大大提高步进电机运行运转精度,使步进电机在中、小功率应用领域向高速且精密化的方向发展。
最初,对步进电机相电流的控制是由硬件来实现的,通常采用两种方法,采用多路功率开关电流供电,在绕组上进行电流叠加,这种方法使功率管损耗少,但由于路数多,所以器件多,体积大。
先对脉冲信号叠加,再经功率管线性放大,获得阶梯形电流,优点是所用器件少,但功率管功耗大,系统功率低,如果管子工作在非线性区会引起失真、由于本身不可克服的缺点,因此目前已很少采用这两类方法。
如何避免步进电机的失步
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机。在未发生失步情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数并不受负载变化的影响,当步进电机接收到一个脉冲信号时,电机就按设定的方向转一个固定的角度(步进角或步距角),通过控制脉冲数和脉冲频率来控制电机角位移量及电机转速从而达到精确的开环控制。另外,步进电机每走一步所转过的角度与理论步距之间总有一定的误差,从某一步到任何一步,也总有一定的误差,但是,步进电机每转一周的步数相同,在不失步的情况下,其步距误差不会长期累积。
上面提到的都是在不失步的情况,如何才能避免失步呢?首先我们需要知道造成电机失步的因素:
1、转子加速度慢于步进电机的旋转磁场;
2、转子的平均速度高于定子磁场的平均旋转速度;
3、电机负载惯性较大;
4、步进电机产生共振。
转子加速度慢于步进电机的旋转磁场即转子速度低于换相速度时,电机会产生失步,这是因为输入电机的电能不足,产生的力矩无法使转子速度跟上定子磁场的旋转速度,从而引起失步。转子平均速度高于定子磁场平均旋转速度,这是定子通电励磁的时间较长,大于步进所需的时间,转子在步进过程中获得过多的能量,导致电机产生的转矩过大从而引起电机越步。
以上导致步进电机失步的原因实质是步进驱动器选择不当而导致,只有选择正确合适的步进驱动器才能使步进电机发挥其控制精确的优势。选择合适的驱动器需要根据电机的电流,配用大于或等于此电流的驱动器。如果需要低振动或高精度时,可配用细分型驱动器。对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。同时对于驱动电源,很多人直接使用开关电源作为驱动电源,但是,一般最好不要使用开关电源,特别是大力矩电机,除非选用比需要的功率大一倍以上的开关电源。因为,电机工作时是大电感型负载,会对电源端形成瞬间的高压。而开关电源的过载性能不好,会保护关断,且其精密的稳压性能又不需要,有时可能造成开关电源和驱动器的损坏。对于步进电机的驱动电源,可以用常规的环形或R 型变压器变压的直流电源。
步进电机产生共振是因为电机接收的脉冲频率等于步进电机的固有频率,该频率与驱动器的细分有关系。我们一般使用步进电机时,驱动器的细分能力很重要,共振范围越小越好。对于电机负载惯性较大是由于电机超载而引起,因此在使用时只需注意不要让电机过载即可避免。
结语
关于步进电机的相关介绍就到这了,希望通过本文能让你对步进电机有更全面的认识。













 工商网监
工商网监
评论