 电子发烧友App
电子发烧友App


本文主要是关于感应电动机的相关介绍,并着重对感应电动机和异步电机的区别进行了详尽的区分。
感应电动机
感应电动机 [1] ,又称“异步电动机”,是将转子置于旋转磁场中,在旋转磁场的作用下,获得一个转动力矩,因而转子转动的装置。转子是可转动的导体,通常多呈鼠笼状。由电气工程师尼古拉·特斯拉于1887年发明。词条介绍了感应电动机的概念、发明者、工作原理、基本结构、工作方式、制动方式、异步特征、规格以及故障检查。
感应电动机又称“异步电动机(asynchronousmotor)”,即转子置于旋转磁场中,在旋转磁场的作用下,获得一个转动力矩,因而转子转动。
转子是可转动的导体,通常多呈鼠笼状。定子是电动机中不转动的部分,主要任务是产生一个旋转磁场。旋转磁场并不是用机械方法来实现。而是以交流电通于数对电磁铁中,使其磁极性质循环改变,故相当于一个旋转的磁场。这种电动机并不像直流电动机有电刷或集电环,依据所用交流电的种类有单相电动机和三相电动机,单相电动机用在如洗衣机,电风扇等;三相电动机则作为工厂的动力设备。
基本结构
单相异步电机的基本结构
单相异步电动机就是只需单相交流电源供电的电动机 [2] 。单相异步电动机由定子、转子、轴承、机壳、端盖等构成。定子由机座和带绕组的铁心组成。铁心由硅钢片冲槽叠压而成,槽内嵌装两套空间互隔90°电角度的主绕组(也称运行绕组)和辅绕组(也称起动绕组成副绕组)。主绕组接交流电源,辅绕组串接离心开关S或起动电容、运行电容等之后,再接入电源。转子为笼型铸铝转子,它是将铁心叠压后用铝铸入铁心的槽中,并一起铸出端环,使转子导条短路成鼠笼型。
单相异步电动机又分为单相电阻起动异步电动机,单相电容起动异步电动机、单相电容运转异步电动机和单相双值电容异步电动机。
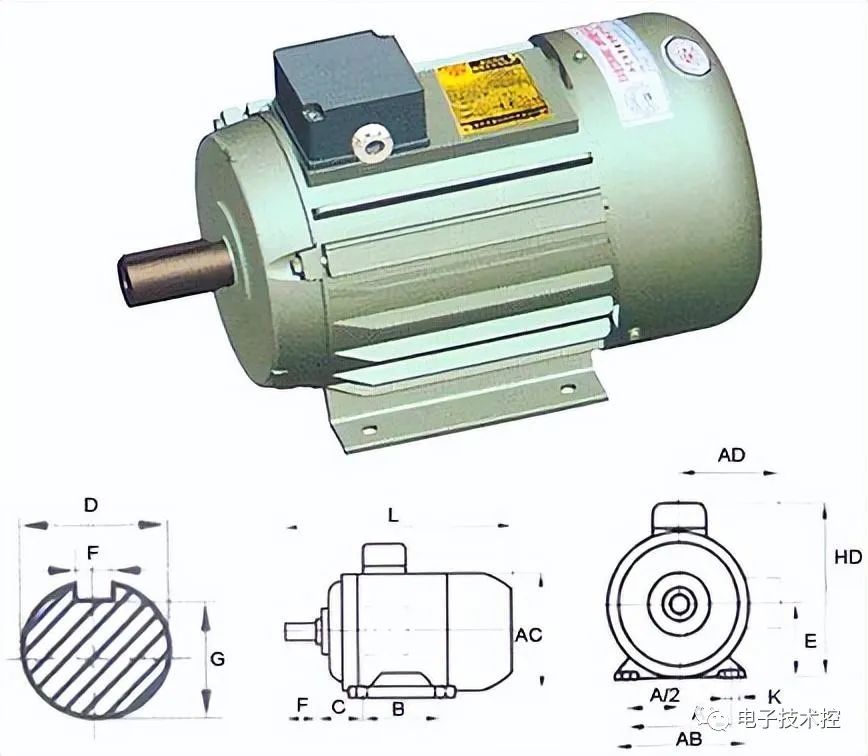
三相异步电机的基本结构
三相异步电动机主要有由定子和转子,轴承组成 [3] 。定子主要由铁心,三相绕组,机座,端盖组成。定子铁心一般由0.35~0.5毫米厚表面具有绝缘层的硅钢片冲制、叠压而成,在铁心的内圆冲有均匀分布的槽,用以嵌放定子绕组。三相绕组由三个在空间互隔120°电角度、队称排列的结构完全相同绕组连接而成,这些绕组的各个线圈按一定规律分别嵌放在定子各槽内。其作用是通入三相交流电,产生旋转磁场。机座通常为铸铁件,大型异步电动机机座一般用钢板焊成,微型电动机的机座采用铸铝件,其作用是固定定子铁心与前后端盖以支撑转子,并起防护、散热等作用。封闭式电机的机座外面有散热筋以增加散热面积,防护式电机的机座两端端盖开有通风孔,使电动机内外的空气可直接对流,以利于散热。端盖主要起固定转子,支撑和防护作用。转子主要由铁心和绕组组成。转子铁心所用材料与定子一样,由0.5毫米厚的硅钢片冲制、叠压而成,硅钢片外圆冲有均匀分布的孔,用来安置转子绕组。通常用定子铁心冲落后的硅钢片内圆来冲制转子铁心。一般小型异步电动机的转子铁心直接压装在转轴上,大、中型异步电动机(转子直径在300~400毫米以上)的转子铁心则借助与转子支架压在转轴上。转子绕组分为鼠笼式转子和绕线式转子。 (1)鼠笼式转子:转子绕组由插入转子槽中的多根导条和两个环行的端环组成。若去掉转子铁心,整个绕组的外形像一个鼠笼,故称笼型绕组。小型笼型电动机采用铸铝转子绕组,对于100KW以上的电动机采用铜条和铜端环焊接而成。鼠笼转子分为:阻抗型转子、单鼠笼型转子、双鼠笼型转子、深槽式转子几种,起动转矩等特性各有不同。 (2)绕线式转子:绕线转子绕组与定子绕组相似,也是一个对称的三相绕组,一般接成星形,三个出线头接到转轴的三个集流环上,再通过电刷与外电路联接。
工作方式
1 异步电动机起动方式
1.1 软起动
随着微型计算机控制技术的迅猛发展,在相关的控制工程领域中先后研制成功了一批电子式软起动控制器,广泛应用在电动机的起动过程,降压启动器随之被替代。当前电子式的软起动设施都使用的是晶闸管的调压电路,其电路构成如下所描述:晶闸管六只,两两反并联后串联至三相电源上,待系统发送起动信号后,微机控制起动器系统立即进行数据计算,令晶闸管输送触发信号,使晶闸管的导通角得到控制,根据给定的输出,调节输出电压,实现电动机的控制。该起动方式适合各种功率值的三相交流异步电动机包括六根和三根连接方式的起动控制。
1.2 直接起动
此种起动方式是电机起动方式中最基础最简单的,首先借助用刀开关使电动机与电网进行连接,此时在额定电压下电动机起动并运行起来,该方式特点为:投资少,设备简单、数量少,虽然起动时间短,但起动时的转矩较小,电流较大,比较适合应用在容量小的电动机起动。
1.3 降压起动
由于直接起动存在较大的缺点,降压起动随之产生。这种起动方式适用的起动环境为空载和轻载这两种情况,由于降压起动方式是在同时实现了限制起动转矩和起动电流的,因此起动工作结束后需要使工作的电路恢复到额定状态。
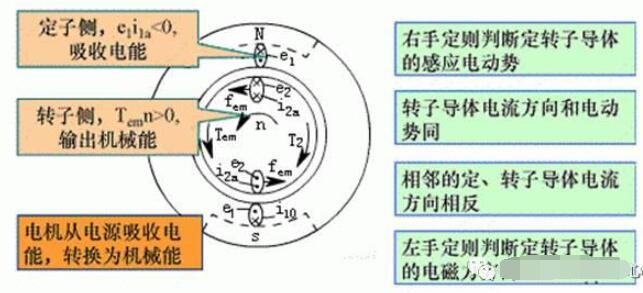
感应电动机工作原理
通过定子产生的旋转磁场(其转速为同步转速n1)与转子绕组的相对运动,转子绕组切割磁感线产生感应电动势,从而使转子绕组中产生感应电流。转子绕组中的感应电流与磁场作用,产生电磁转矩,使转子旋转。由于当转子转速逐渐接近同步转速时,感应电流逐渐减小,所产生的电磁转矩也相应减小,当异步电动机工作在电动机状态时,转子转速小于同步转速。为了描述转子转速n与同步转速n1之间的差别,引入转差率(slip)。
感应电动机和异步电机的区别
「异步电动机」和「感应电动机」这两个词在电机专业课本中非常常见,并且经常换用。那么这两个词到底有没有区别呢?
1、辞海
辞海收录了「异步电动机」词条(链接),其解释为:
异步电动机,又称「感应电动机」。利用定子与转子间气隙旋转磁场与转子绕组感应电流相互作用的一种交流电动机。其转子转速低于旋转磁场的同步转速。电力传动机械中有90%左右由其驱动。
可见,辞海认为「异步电动机」和「感应电动机」这两个词是等价的。
2、维基百科
维基百科「异步电动机」词条(链接)中给出了异步电动机和感应电动机的区别:
异步电动机是一种交流电动机,其负载时的转速与所接电网频率之比不是恒定值。感应电动机(InducTIon motor)是一种仅有一套绕组连接电源的异步电动机。在不致引起误解和混淆的情况下,一般可称感应电动机为异步电动机。IEC标准中指出:「感应电动机」一词,在许多国家中实际上是作为「异步电动机」的同义词使用,而其他一些国家则只使用「异步电动机」一词来表示这两种概念。
按照维基百科的解释,「感应电动机」仅仅是「异步电动机」的一个子类。
3、教材惯例
在陈伯时的教材「电力拖动自动控制系统」一书中,陈老先生明确在书中指出(第4版,第113页):
交流电动机有异步电动机(即感应电动机)和同步电动机两大类……
在辜承林老师的「电机学」异步电机章节的开篇中,作者就提出
异步电机是一种交流电机,也叫感应电机,主要作电动机使用……
可见,陈伯时和辜承林都认为异步电机和感应电机是一回事。
感应电机和普通电机的区别
一般是将感应式电机跟可逆式电机做对比:
感应式电机特征:
1、感应马达指的是感应运转型马达。在启动、运转中都使用辅助线圈和电容。其结构简单,信赖度高,效率也颇大。
2、可连续运转,随负荷的增加,电机转速也会改变。适用于不需要速度控制的用途上。有单相感应电机和三相感应电机两种。
3、马达运转时,产生于转速方向逆方向的转矩,因此不可能在短时间内改变方向。
可逆式电机特征
1、可逆马达为电容运转型感应马达。(又称阻尼马达)常使用与频繁正反转的用途。
2、可以瞬间正逆运转。装上简便的制动装置,能在短时间之内正逆旋转。设计时定子线圈的主线圈和副线圈相同,使得正逆运转时拥有相同的特征。
3、为了提升短时间内的正、逆转的瞬间可逆性,把启动转矩加大。
4、为了防止超运转,利用简便的阻尼装置来取代若干维持力。停止时间能阻止超运转,瞬间能力非常好。
5、使用转换按钮,以简易和快速的方式转换马达的旋转方向。
注意:可逆式马达具有短时间内实现正逆运转的特性,因频繁正逆运转会造成较大的能量损失,其温度上升较快,因此运转时间定为30分钟。
结语
关于感应电动机的相关介绍就到这了,如有不足之处欢迎指正。














 工商网监
工商网监
评论