 电子发烧友App
电子发烧友App


反电动势怎么产生的
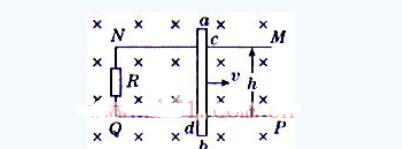
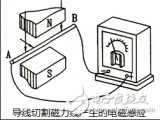
电动机运转时有通过电流的导线。通电导线切割磁感线会产生电动势。所以此时电动机运转在切割磁感线,也会产生电动势。用右手定则判断,此电动势的方向和电动机两端所加电压相反,所以把这里产生的电动势称作反电动势。
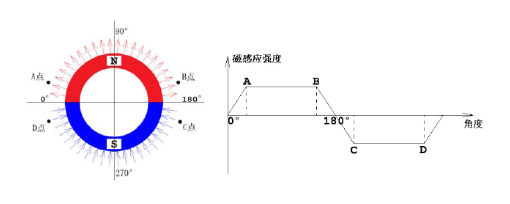
计算方式,设线圈的面积为s,角速度为w,则E=BSw,如果知道匝数n还要乘上n,也就是E=nBSw
这个公式怎么来的,你可以先画一个正方形铁框,它在磁场中绕上下两边中线的连线转动(正方形平面是竖直的,磁场方向是水平的),这样正方形上下两边没有切割,竖直的边在切割,每一条边产生的电动势为BL*1/2WL (L是边长,V=1/2WL),和电动势为BL*WL,即BWS。
这个是特殊情形,可以用微元的思想将它推广,E=BSW。
影响:本来电动机有电压,产生反电动势后,等效的电压就小一些(两者方向相反故相减),于是电动机不会被烧坏。(线圈的电阻R很小,U太大产生的热量太多就会烧掉)
其实产生反电动势,从能量守恒来看,就是电能转化成了机械能 。
反电动势的检测方法
一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。例如,当A相和B相已经持续60°电角度时,C相不导通。这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有:
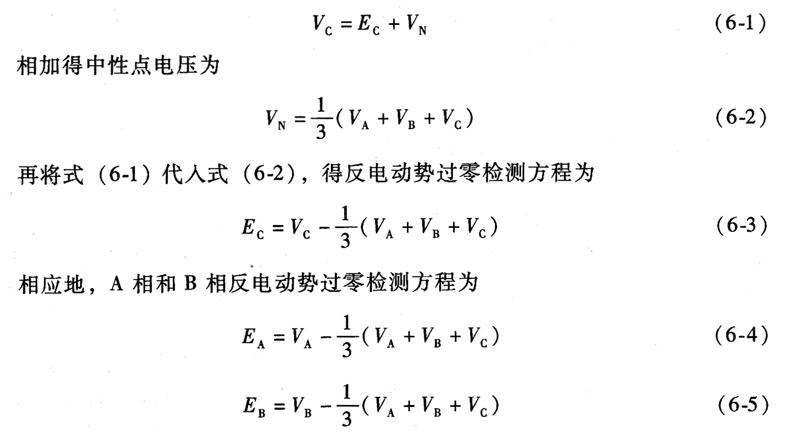
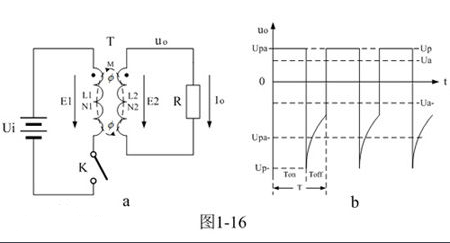
根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。这种方法十分简单,实现也比较方便。但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
这样,在一个PWM周期中,电枢绕组相电流就必然存在断续状态。速度提高时,电枢绕组中会产生峰峰值极大、频率很高的反电动势。由于以上特点,一些普遍采用的BLDC无位置传感器的控制方法均不适合。现有的无位置传感器的控制方法,如端电压检测法和转子位置估计法等,将很难得到良好的控制效果,其理由如下所述:
首先,无刷直流电机要求在电机转速提高的过程中,采用现有的端电压与中点电压比较的方法,要对三相绕组进行分压阻容滤波,计算出不导通相反电动势的过零点,再延后一定时间进行换相。但是,这样得到的反电动势过零点会因为无刷直流电机转速提高而产生过大的相移,导致当检测到反电动势过零点后,真正的换相点已经过去,从而造成换相失误。另外,现有的转子位置估计法,在高速时必须以极高的采样频率对永磁无刷直流电机中多个物理量进行测量,然后运行复杂的算法估计出转子位置,这样即使采用主频较高的控制器,也很难实时得到精确的位置信号。并且,随着电机转速的提高,位置估计算法难以及时地计算出当前电机转子的位置情况,对于转速范围较大的情况,无位置传感器的检测难以实现。
其次,现有的无刷直流电机无位置传感器的控制方法一般只适用于绕组相电流不存在断续状态的情况。而当永磁无刷直流电机电枢电感较小时,在一个PWM周期中,则可能出现绕组相电流断续状态。当相电流从续流状态向断流状态突变时,由于三相逆变桥中功率管的寄生电容和电枢绕组中的电感和电阻相互作用,端电压会存在二阶阻尼振荡过程。在振荡过程中,将检测到的电枢绕组端电压应用于无位置传感器的换相中,会得到不正确的结果。
因此,使用现有的无位置传感器的控制方法,应用于小电枢电感的磁悬浮飞轮用无刷直流电机上,都无法得到良好的控制效果。
责任编辑:YYX












 工商网监
工商网监
评论