 电子发烧友App
电子发烧友App


随着嵌入式计算机应用的发展,嵌入式CPU的主频不断提高,这就造成了慢速系统存储器不能匹配高速CPU处理能力的情况。为了解决这个问题,许多高性能的嵌入式处理器内部集成了高速缓存cache。其中,三星公司的S3C44B0X内部就集成了8 KB空间统一的指令和数据Cache。
Cache即高速缓冲存储器,是位于CPU与主存之间一种容量较小,但速度很高的存储器。由于CPU在进行运算时,所需的指令和数据都是从主存中提取的,而CPU运算速度要比主存读写速度快得多,这样极其影响整个系统的性能。采用Cache技术,即在Cache中存放CPU常用的指令和数据,然后将这些数据和指令以一定的算法和策略从主存中调入,使CPU可以不必等待主存数据而保持高速操作。这样就满足了嵌入式系统实时、高效的要求。但Cache的使用也带来了一致性的问题,在应用中应特别注意。
1 Cache一致性问题的发现
本项目的目标板为:处理器采用ARM芯片S3C44B0X,存储器采用2片Flash和1片SDRAM,在调试的时候输入采用键盘,输出采用显示器,用RS232串口实现通信。
在项目的开发过程中,经软件仿真调试成功的程序,烧入目标板后,程序却发生异常中止。通过读存储器的内容发现,程序不能正常运行在目标板上,是因为存储器中写入的数据与程序编译生成的数据不一致,总是出现一些错误字节。
经过一段时间的调试发现,只要在程序中禁止Cache的使用,存储器中写入的数据将不再发生错误,程序可以正常运行,但速度明显减慢。经过分析,认为问题是由于Cache数据与主存数据的不一致性造成的。
Cache数据与主存数据不一致是指:在采用Cache的系统中,同样一个数据可能既存在于Cache中,也存在于主存中,两者数据相同则具有一致性,数据不相同就叫做不一致性。如果不能保证数据的一致性,那么,后续程序的运行就要出现问题。
2 分析Cache的一致性问题
要解释Cache的一致性问题,首先要了解Cache的工作模式。Cache的工作模式有两种:写直达模式(writethrough)和写回模式(writeback)。写直达模式是,每当CPU把数据写到Cache中时,Cache控制器会立即把数据写入主存对应位置。所以,主存随时跟踪Cache的最新版本,从而也就不会有主存将新数据丢失这样的问题。此方法的优点是简单,缺点是每次Cache内容有更新,就要对主存进行写入操作,这样会造成总线活动频繁。S3C44B0X中的Cache就是采用的写直达模式(writethrough)。在写直达模式下,数据输出时,系统会把数据同时写入高速缓冲存储器Cache和主存中,这样就保证了输出时高速缓冲存储器的一致性。但该模式下,却无法保证输入时的高速缓冲存储器的一致性。
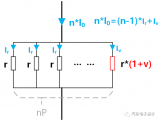
下面再看一下Cache的组织方式。按照主存和Cache之间的映像关系,Cache有三种组织方式。全相联方式、直接映像方式和组相联方式。其中,直接映像方式的原理如图1所示。

按照Cache的行数m,把主存分为n/m个区域,每个区中有m个存储块。各区中的0~(m-1)块一一对应地固定映射到Cache中L0~Lm-1行。这样,标签只要给定区地址(区号),就能唯一确定Cache行与存储器的对应关系。当CPU发出存储器访问时,以存储器地址作为行索引,寻址到一高速缓冲行,检测该行的标签。若标签与存储器的相应地址匹配,则Cache命中。该高速缓存行当前即为欲访问存储块的唯一映像。从上面的分析可以看出,在写直达模式下,由于每次Cache内容有更新,就要对主存进行写入操作,造成总线活动频繁。在Cache命中的过程中,如果总线遇到干扰,就会出现数据不一致的现象。
3 Cache一致性问题的解决方法
该问题可以从软件及硬件两方面着手解决。
3.1 软件解决的方法
S3C44B0X的Cache提供完整的Cache使能和禁止操作模式。能够通过设置SYSCFG寄存器中CM域中的值为01或11来使能Cache(其中,01为使能4 KB Cache, 11为使能8 KB Cache),而通过清除SYSCFG寄存器中[2:1]域为0来禁止Cache功能。用禁止Cache的方法来消除数据不一致性问题,具体代码如下:
#define rSYSCFG(*(volatile unsigned *)0x1c00000)
#define WRBUFOPT (0x8) //write_buf_on
#define SYSCFG_0KB (0x0|WRBUFOPT)
#define SY
SCFG_4KB (0x2|WRBUFOPT)
#define SYSCFG_8KB (0x6|WRBUFOPT)
#define cacheCFGSYSCFG_0KB
rSYSCFG= CACHECFG; //禁止Cache
另外,S3C44B0X还提供了2个不能Cache访问的区域(noncacheable area)。每个区域要求两个Cache控制域,用来表明每一个不能Cache访问区域的起始和结束地址。在不能Cache访问的区域,当Cache没有命中,一个读的时候,Cache不能更新。在已知影响到数据不一致的地址情况下,可以在使能Cache的条件下,用设定不能Cache访问区域的方法,防止产生数据不一致现象。有时,如果数据区域被安排在不能Cache区域,程序执行速度更高,因为多数变量是不能重用的。对于不能重用的变量,刷新16 B的Cache存储器是浪费的。本系统中设定不能Cache访问的区域为0x2000000~0xc000000,就可以解决数据不一致问题。代码如下:
#define rSYSCFG(*(volatile unsigned *)0x1
c00000)
#define WRBUFOPT (0x8) //write_buf_on
#define SYSCFG_0KB (0x0|WRBUFOPT)
#defineSYSCFG_4KB (0x2|WRBUFOPT)
#define SYSCFG_8KB (0x6|WRBUFOPT)
#define CACHECFG SYSCFG_8KB
#define rNCACHBE0 (*(volatile unsigned *)0x1c00004)
#define rNCACHBE1 (*(volatile unsigned *)0x1c00008)
#define Non_Cache_Start(0x2000000)
//不能Cache访问的区域开始地址
#define Non_Cache_End(0xc000000)
//不能Cache访问的区域结束地址
rSYSCFG= CACHECFG;
// 8 KB cache,写缓冲使能,data abort使能
rNCACHBE0= ((Non_Cache_End>>12)<<16)|(Non_Cache_Start>>12);//在上面的数据区域不使用高速缓存Cache
采用上述两种方法,排除了数据不一致性的问题。但一个高性能的系统是需要Cache的,禁止Cache的使用会大大降低系统的性能。所以,在嵌入式系统的设计中,还应从硬件方面考虑,从根本上防止数据不一致的产生。
3.2 硬件的解决方法
由于现在的嵌入式处理器,主频越来越高,地址、数据线越来越多,所以在硬件的设计和焊接过程中应特别注意高频干扰的问题。因为高频干扰可以引起信号的不完整性,这些不完整的信号会引起总线传输过程中出现一些坏字节,所以高速PCB设计变得尤为重要。高速PCB设计中,对高速信号网络的特征与走线
控制的设计技术,已成为高速数字设备成功与否的关键。在设计中应注意下列问题:
① 在成本允许的条件下, PCB尽量采用多层板布线。
② 高频电路布线的引线最好采用全直线,需要转折时,可以用45°折线或圆弧转折。在高频电路中
,满足这一要求可以减少高频信号对外的发射和相互间的耦合。
③ 高频电路器件引脚的引线层间的交替越少越好,过孔越少越好。据测,一个过孔可带来约0.5 pF
的分布电容,减少过孔数量能显著提高速度。
④ 高频电路布线要注意信号线近距离平行走线所引入的“交叉干扰”,若无法避免平行分布,可在
平行信号线的反面布置大面积“地”来减少干扰。同一层内的平行走线几乎无法避免,但是在相邻的两个
层,走线的方向务必取为相互垂直。
⑤ 每个集成电路块的附近应设置一个高频退耦电容。
⑦ 对特别重要的信号线或局部单元实施地线包围的措施,各类信号走线不能形成环路,地线也不能
形成电流环路。
在注意了上面的设计规则之后,制作出的PCB基本上可以满足高速信号的要求。
最后,就是在焊接时要注意焊点一定要圆滑。因为焊点的尖峰会产生很强的高频干扰。
有了上述各条规则,就保证了在信号传输过程中,总线上不会出现不必要的干扰,防止了数据不一致的发生。
结语
嵌入式处理器已经被广泛应用。本文提到的对S3C44B0X中cache数据不一致性的处理方法同样适用于其他型号的高频嵌入式处理器。掌握一些设计、调试的基本经验,可以大大提高工作效率,减小系统开发过程中不必要的麻烦。










 工商网监
工商网监
评论