 电子发烧友App
电子发烧友App


1. 前言
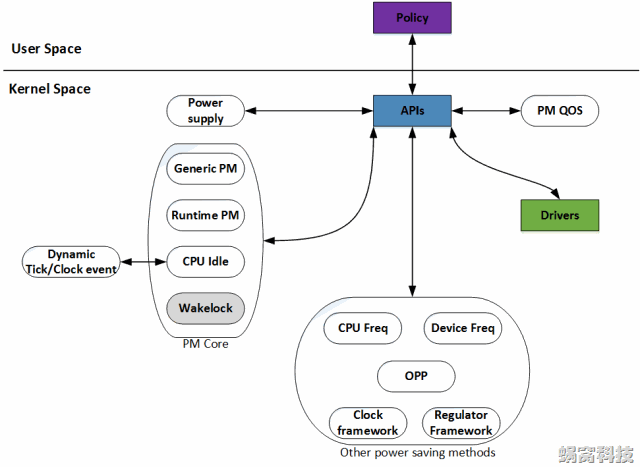
Linux电源管理中,相当多的部分是在处理Hibernate、Suspend、Runtime PM等功能。而这些功能都基于一套相似的逻辑,即“Power management interface”。该Interface的代码实现于“include/linux/pm.h”、“drivers/base/power/main.c”等文件中。主要功能是:对下,定义Device PM相关的回调函数,让各个Driver实现;对上,实现统一的PM操作函数,供PM核心逻辑调用。
因此在对Hibernate、Suspend、Runtime PM等功能解析之前,有必要先熟悉一下PM Interface,这就是本文的主要目的。
2. device PM callbacks
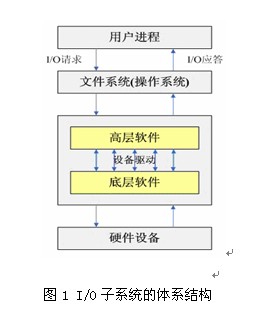
在一个系统中,数量最多的是设备,耗电最多的也是设备,因此设备的电源管理是Linux电源管理的核心内容。而设备电源管理最核心的操作就是:在合适的时机(如不再使用,如暂停使用),将设备置为合理的状态(如关闭,如睡眠)。这就是device PM callbacks的目的:定义一套统一的方式,让设备在特定的时机,步调一致的进入类似的状态(可以想象一下军训时的“一二一”口令)。
在旧版本的内核中,这些PM callbacks分布在设备模型的大型数据结构中,如struct bus_type中的suspend、suspend_late、resume、resume_late,如struct device_driver/struct class/struct device_type中的suspend、resume。很显然这样不具备良好的封装特性,因为随着设备复杂度的增加,简单的suspend、resume已经不能满足电源管理的需求,就需要扩充PM callbacks,就会不可避免的改动这些数据结构。
于是新版本的内核,就将这些Callbacks统一封装为一个数据结构----struct dev_pm_ops,上层的数据结构只需要包含这个结构即可。这样如果需要增加或者修改PM callbacks,就不用改动上层结构了(这就是软件设计中抽象和封装的生动体现,像艺术一样优雅)。当然,内核为了兼容旧的设计,也保留了上述的suspend/resume类型的callbacks,只是已不建议使用,本文就不再介绍它们了。
相信每一个熟悉了旧版本内核的Linux工程师,看到struct dev_pm_ops时都会虎躯一震,这玩意也太复杂了吧!不信您请看:
1: /* include/linux/pm.h, line 276 in linux-3.10.29 */
2: struct dev_pm_ops {
3: int (*prepare)(struct device *dev);
4: void (*complete)(struct device *dev);
5: int (*suspend)(struct device *dev);
6: int (*resume)(struct device *dev);
7: int (*freeze)(struct device *dev);
8: int (*thaw)(struct device *dev);
9: int (*poweroff)(struct device *dev);
10: int (*restore)(struct device *dev);
11: int (*suspend_late)(struct device *dev);
12: int (*resume_early)(struct device *dev);
13: int (*freeze_late)(struct device *dev);
14: int (*thaw_early)(struct device *dev);
15: int (*poweroff_late)(struct device *dev);
16: int (*restore_early)(struct device *dev);
17: int (*suspend_noirq)(struct device *dev);
18: int (*resume_noirq)(struct device *dev);
19: int (*freeze_noirq)(struct device *dev);
20: int (*thaw_noirq)(struct device *dev);
21: int (*poweroff_noirq)(struct device *dev);
22: int (*restore_noirq)(struct device *dev);
23: int (*runtime_suspend)(struct device *dev);
24: int (*runtime_resume)(struct device *dev);
25: int (*runtime_idle)(struct device *dev);
26: };
从Linux PM Core的角度来说,这些callbacks并不复杂,因为PM Core要做的就是在特定的电源管理阶段,调用相应的callbacks,例如在suspend/resume的过程中,PM Core会依次调用“prepare—>suspend—>suspend_late—>suspend_noirq-------wakeup--------->resume_noirq—>resume_early—>resume-->complete”。
但由于这些callbacks需要由具体的设备Driver实现,这就要求驱动工程师在设计每个Driver时,清晰的知道这些callbacks的使用场景、是否需要实现、怎么实现,这才是struct dev_pm_ops的复杂之处。
Linux kernel对struct dev_pm_ops的注释已经非常详细了,但要弄清楚每个callback的使用场景、背后的思考,并不是一件容易的事情。因此蜗蜗不准备在本文对它们进行过多的解释,而打算结合具体的电源管理行为,基于具体的场景,再进行解释。
3. device PM callbacks在设备模型中的体现
我们在介绍“Linux设备模型”时,曾多次提及电源管理相关的内容,那时蜗蜗采取忽略的方式,暂不说明。现在是时候回过头再去看看了。
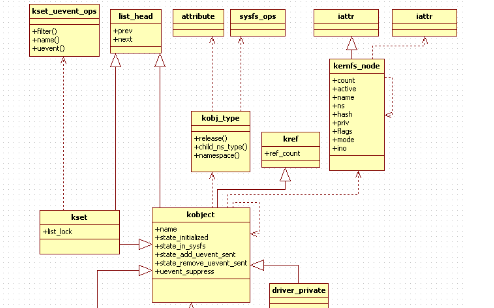
Linux设备模型中的很多数据结构,都会包含struct dev_pm_ops变量,具体如下:
1: struct bus_type {
2: ...
3: const struct dev_pm_ops *pm;
4: ...
5: };
6:
7: struct device_driver {
8: ...
9: const struct dev_pm_ops *pm;
10: ...
11: };
12:
13: struct class {
14: ...
15: const struct dev_pm_ops *pm;
16: ...
17: };
18:
19: struct device_type {
20: ...
21: const struct dev_pm_ops *pm;
22: };
23:
24: struct device {
25: ...
26: struct dev_pm_info power;
27: struct dev_pm_domain *pm_domain;
28: ...
29: };
bus_type、device_driver、class、device_type等结构中的pm指针,比较容易理解,和旧的suspend/resume callbacks类似。我们重点关注一下device结构中的power和pm_domain变量。
◆power变量
power是一个struct dev_pm_info类型的变量,也在“include/linux/pm.h”中定义。从蜗蜗一直工作于的Linux-2.6.23内核,到写这篇文章所用的Linux-3.10.29内核,这个数据结构可是一路发展壮大,从那时的只有4个字段,到现在有40多个字段,简直是想起来什么就放什么啊!
power变量主要保存PM相关的状态,如当前的power_state、是否可以被唤醒、是否已经prepare完成、是否已经suspend完成等等。由于涉及的内容非常多,我们在具体使用的时候,顺便说明。
◆pm_domain指针
在当前的内核中,struct dev_pm_domain结构只包含了一个struct dev_pm_ops ops。蜗蜗猜测这是从可扩展性方面考虑的,后续随着内核的进化,可能会在该结构中添加其他内容。
所谓的PM Domain(电源域),是针对“device”来说的。bus_type、device_driver、class、device_type等结构,本质上代表的是设备驱动,电源管理的操作,由设备驱动负责,是理所应当的。但在内核中,由于各种原因,是允许没有driver的device存在的,那么怎么处理这些设备的电源管理呢?就是通过设备的电源域实现的。
4. device PM callbacks的操作函数
内核在定义device PM callbacks数据结构的同时,为了方便使用该数据结构,也定义了大量的操作API,这些API分为两类。
◆通用的辅助性质的API,直接调用指定设备所绑定的driver的、pm指针的、相应的callback,如下
1: extern int pm_generic_prepare(struct device *dev);
2: extern int pm_generic_suspend_late(struct device *dev);
3: extern int pm_generic_suspend_noirq(struct device *dev);
4: extern int pm_generic_suspend(struct device *dev);
5: extern int pm_generic_resume_early(struct device *dev);
6: extern int pm_generic_resume_noirq(struct device *dev);
7: extern int pm_generic_resume(struct device *dev);
8: extern int pm_generic_freeze_noirq(struct device *dev);
9: extern int pm_generic_freeze_late(struct device *dev);
10: extern int pm_generic_freeze(struct device *dev);
11: extern int pm_generic_thaw_noirq(struct device *dev);
12: extern int pm_generic_thaw_early(struct device *dev);
13: extern int pm_generic_thaw(struct device *dev);
14: extern int pm_generic_restore_noirq(struct device *dev);
15: extern int pm_generic_restore_early(struct device *dev);
16: extern int pm_generic_restore(struct device *dev);
17: extern int pm_generic_poweroff_noirq(struct device *dev);
18: extern int pm_generic_poweroff_late(struct device *dev);
19: extern int pm_generic_poweroff(struct device *dev);
20: extern void pm_generic_complete(struct device *dev);
以pm_generic_prepare为例,就是查看dev->driver->pm->prepare接口是否存在,如果存在,直接调用并返回结果。
◆和整体电源管理行为相关的API,目的是将各个独立的电源管理行为组合起来,组成一个较为简单的功能,如下
1: #ifdef CONFIG_PM_SLEEP
2: extern void device_pm_lock(void);
3: extern void dpm_resume_start(pm_message_t state);
4: extern void dpm_resume_end(pm_message_t state);
5: extern void dpm_resume(pm_message_t state);
6: extern void dpm_complete(pm_message_t state);
7:
8: extern void device_pm_unlock(void);
9: extern int dpm_suspend_end(pm_message_t state);
10: extern int dpm_suspend_start(pm_message_t state);
11: extern int dpm_suspend(pm_message_t state);
12: extern int dpm_prepare(pm_message_t state);
13:
14: extern void __suspend_report_result(const char *function, void *fn, int ret);
15:
16: #define suspend_report_result(fn, ret)
17: do {
18: __suspend_report_result(__func__, fn, ret);
19: } while (0)
20:
21: extern int device_pm_wait_for_dev(struct device *sub, struct device *dev);
22: extern void dpm_for_each_dev(void *data, void (*fn)(struct device *, void *));
这些API的功能和动作解析如下。
dpm_prepare,执行所有设备的“->prepare() callback(s)”,内部动作为:
1)遍历dpm_list,依次取出挂在该list中的device指针。
【注1:设备模型在添加设备(device_add)时,会调用device_pm_add接口,将该设备添加到全局链表dpm_list中,以方便后续的遍历操作。】
2)调用内部接口device_prepare,执行实际的prepare动作。该接口会返回执行的结果。
3)如果执行失败,打印错误信息。
4)如果执行成功,将dev->power.is_prepared(就是上面我们提到的struct dev_pm_info类型的变量)设为TRUE,表示设备已经prepared了。同时,将该设备添加到dpm_prepared_list中(该链表保存了所有已经处于prepared状态的设备)。
内部接口device_prepare的执行动作为:
1)根据dev->power.syscore,断该设备是否为syscore设备。如果是,则直接返回(因为syscore设备会单独处理)。
2)在prepare时期,调用pm_runtime_get_noresume接口,关闭Runtime suspend功能。以避免由Runtime suspend造成的不能正常唤醒的Issue。该功能会在complete时被重新开启。
【注2:pm_runtime_get_noresume的实现很简单,就是增加该设备power变量的引用计数(dev->power.usage_count),Runtime PM会根据该计数是否大于零,判断是否开启Runtime PM功能。】
3)调用device_may_wakeup接口,根据当前设备是否有wakeup source(dev->power.wakeup)以及是否允许wakeup(dev->power.can_wakeup),判定该设备是否是一个wakeup path(记录在dev->power.wakeup_path中)。
【注3:设备的wake up功能,是指系统在低功耗状态下(如suspend、hibernate),某些设备具备唤醒系统的功能。这是电源管理过程的一部分。】
4)根据优先顺序,获得用于prepare的callback函数。由于设备模型有bus、driver、device等多个层级,而prepare接口可能由任意一个层级实现。这里的优先顺序是指,只要优先级高的层级注册了prepare,就会优先使用它,而不会使用优先级低的prepare。优先顺序为:dev->pm_domain->ops、dev->type->pm、dev->class->pm、dev->bus->pm、dev->driver->pm(这个优先顺序同样适用于其它callbacks)。
5)如果得到有限的prepare函数,调用并返回结果。
dpm_suspend,执行所有设备的“->suspend() callback(s)”,其内部动作和dpm_prepare类似:
1)遍历dpm_list,依次取出挂在该list中的device指针。
2)调用内部接口device_suspend,执行实际的prepare动作。该接口会返回执行的结果。
3)如果suspend失败,将该设备的信息记录在一个struct suspend_stats类型的数组中,并打印错误错误信息。
4)最后将设备从其它链表(如dpm_prepared_list),转移到dpm_suspended_list链表中。
内部接口device_suspend的动作和device_prepare类似,这里不再描述了。
dpm_suspend_start,依次执行dpm_prepare和dpm_suspend两个动作。
dpm_suspend_end,依次执行所有设备的“->suspend_late() callback(s)”以及所有设备的“->suspend_noirq() callback(s)”。动作和上面描述的类似,这里不再说明了。
dpm_resume、dpm_complete、dpm_resume_start、dpm_resume_end,是电源管理过程的唤醒动作,和dpm_suspend_xxx系列的接口类似。不再说明了。













 工商网监
工商网监
评论