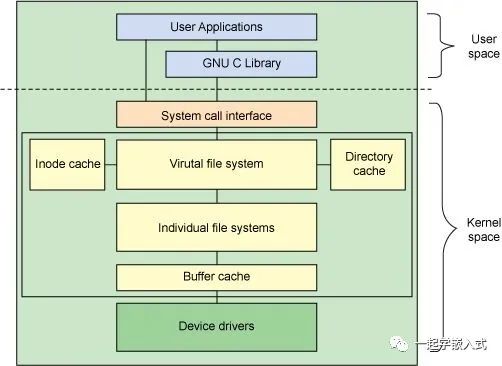
 电子发烧友App
电子发烧友App


本质上,Ext3 mount的过程实际上是inode被替代的过程。
例如,/dev/sdb块设备被mount到/mnt/alan目录。命令:mount -t ext3 /dev/sdb /mnt/alan。
那么mount这个过程所需要解决的问题就是将/mnt/alan的dentry目录项所指向的inode屏蔽掉,然后重新定位到/dev/sdb所表示的inode索引节点。
在没有分析阅读linux vfs mount代码的时候,我的想法是修改dentry所指向的inode索引节点,以此实现mount文件系统的访问。
经过分析,在实际的vfs mount实现过程中,还是和我原始的想法略有差别,但是,基本目标还是相同的。
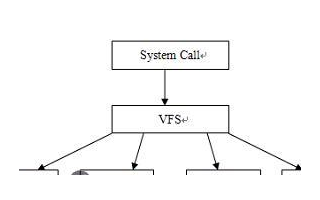
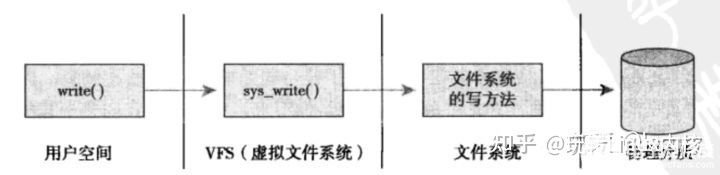
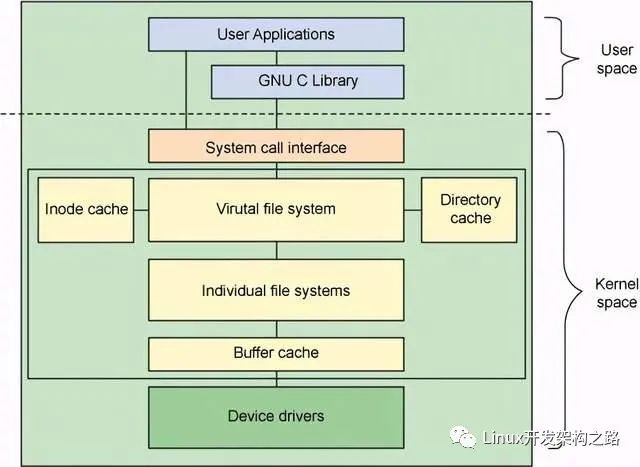
Linux VFS的mount过程基本原理如下图所示:
当用户输入”mount -t ext3 /dev/sdb /mnt/alan”命令后:
1> Linux会解析/mnt/alan字符串,并且从Dentry Hash表中获取相关的dentry目录项,然后将该目录项标识成DCACHE_MOUNTED。
2> 一旦该dentry被标识成DCACHE_MOUNTED,也就意味着在访问路径上对其进行了屏蔽。
3> 在mount /dev/sdb设备上的ext3文件系统时,内核会创建一个该文件系统的superblock对象,并且从/dev/sdb设备上读取所有的superblock信息,初始化该内存对象。
Linux内核维护了一个全局superblock对象链表。
s_root是superblock对象所维护的dentry目录项,该目录项是该文件系统的根目录。即新mount的文件系统内容都需要通过该根目录进行访问。
在mount的过程中,VFS会创建一个非常重要的vfsmount对象,该对象维护了文件系统mount的所有信息。
Vfsmount对象通过HASH表进行维护,通过path地址计算HASH值,在这里vfsmount的HASH值通过“/mnt/alan”路径字符串进行计算得到。
Vfsmount中的mnt_root指向superblock对象的s_root根目录项。
因此,通过/mnt/alan地址可以检索VFSMOUNT Hash Table得到被mount的vfsmount对象,进而得到mnt_root根目录项。
例如,/dev/sdb被mount之后,用户想要访问该设备上的一个文件ab.c,假设该文件的地址为:/mnt/alan/ab.c。
1> 在打开该文件的时候,首先需要进行path解析。
2> 在解析到/mnt/alan的时候,得到/mnt/alan的dentry目录项,并且发现该目录项已经被标识为DCACHE_MOUNTED。
3> 之后,会采用/mnt/alan计算HASH值去检索VFSMOUNT Hash Table,得到对应的vfsmount对象。
4> 然后采用vfsmount指向的mnt_root目录项替代/mnt/alan原来的dentry,从而实现了dentry和inode的重定向。
5> 在新的dentry的基础上,解析程序继续执行,最终得到表示ab.c文件的inode对象。
一、关键数据结构说明
Linux VFS mount所涉及的关键数据结构分析如下。
Vfsmount数据结构
Vfsmount数据结构是vfs mount最为重要的数据结构,其维护了一个mount点的所有信息。
该数据结构描述如下:

struct vfsmount { struct list_head mnt_hash; /* 连接到VFSMOUNT Hash Table */ struct vfsmount *mnt_parent; /* 指向mount树中的父节点 */ struct dentry *mnt_mountpoint; /* 指向mount点的目录项 */ struct dentry *mnt_root; /* 被mount的文件系统根目录项 */ struct super_block *mnt_sb; /* 指向被mount的文件系统superblock */ #ifdef CONFIG_SMP struct mnt_pcp __percpu *mnt_pcp; atomic_t mnt_longterm; /* how many of the refs are longterm */ #else int mnt_count; int mnt_writers; #endif struct list_head mnt_mounts; /* 下级(child)vfsmount对象链表 */ struct list_head mnt_child; /* 链入上级vfsmount对象的链表点 */ int mnt_flags; /* 4 bytes hole on 64bits arches without fsnotify */ #ifdef CONFIG_FSNOTIFY __u32 mnt_fsnotify_mask; struct hlist_head mnt_fsnotify_marks; #endif const char *mnt_devname; /* 文件系统所在的设备名字,例如/dev/sdb */ struct list_head mnt_list; struct list_head mnt_expire; /* link in fs-specific expiry list */ struct list_head mnt_share; /* circular list of shared mounts */ struct list_head mnt_slave_list;/* list of slave mounts */ struct list_head mnt_slave; /* slave list entry */ struct vfsmount *mnt_master; /* slave is on master->mnt_slave_list */ struct mnt_namespace *mnt_ns; /* containing namespace */ int mnt_id; /* mount identifier */ int mnt_group_id; /* peer group identifier */ int mnt_expiry_mark; /* true if marked for expiry */ int mnt_pinned; int mnt_ghosts; };
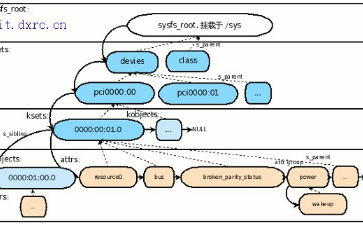
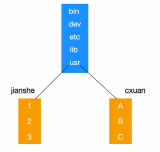
在Linux内核中不仅存在VFSMOUNT的Hash Table,而且还维护了一棵Mount对象树,通过该mount树,我们可以了解到各个文件系统之间的关系。
该mount树描述如下:
上图所示为三层mount文件系统树。
第一层为系统根目录“/”;
第二层有两个mount点,一个为/mnt/a,另一个是/mnt/b;
第三层在/mnt/a的基础上又创建了两个mount点,分别为/mnt/a/c和/mnt/a/d。
通过mount树,可以对整个系统的mount结构一目了然。
Superblock数据结构
每个文件系统都会拥有一个superblock对象对其基本信息进行描述。
对于像ext3之类的文件系统而言,在磁盘上会持久化存储一份superblock元数据信息,内存的superblock对象由磁盘上的信息初始化。
对于像block device 之类的“伪文件系统”而言,在mount的时候也会创建superblock对象,只不过很多信息都是临时生成的,没有持久化信息。
Vfs superblock数据结构定义如下:
struct super_block { struct list_head s_list; /* 链入全局链表的对象*/ dev_t s_dev; /* search index; _not_ kdev_t */ unsigned char s_dirt; unsigned char s_blocksize_bits; unsigned long s_blocksize; loff_t s_maxbytes; /* Max file size */ struct file_system_type *s_type; const struct super_operations *s_op; /* superblock操作函数集 */ const struct dquot_operations *dq_op; const struct quotactl_ops *s_qcop; const struct export_operations *s_export_op; unsigned long s_flags; unsigned long s_magic; struct dentry *s_root; /* 文件系统根目录项 */ struct rw_semaphore s_umount; struct mutex s_lock; int s_count; atomic_t s_active; #ifdef CONFIG_SECURITY void *s_security; #endif const struct xattr_handler **s_xattr; struct list_head s_inodes; /* all inodes */ struct hlist_bl_head s_anon; /* anonymous dentries for (nfs) exporting */ #ifdef CONFIG_SMP struct list_head __percpu *s_files; #else struct list_head s_files; #endif /* s_dentry_lru, s_nr_dentry_unused protected by dcache.c lru locks */ struct list_head s_dentry_lru; /* unused dentry lru */ int s_nr_dentry_unused; /* # of dentry on lru */ /* s_inode_lru_lock protects s_inode_lru and s_nr_inodes_unused */ spinlock_t s_inode_lru_lock ____cacheline_aligned_in_smp; struct list_head s_inode_lru; /* unused inode lru */ int s_nr_inodes_unused; /* # of inodes on lru */ struct block_device *s_bdev; struct backing_dev_info *s_bdi; struct mtd_info *s_mtd; struct list_head s_instances; struct quota_info s_dquot; /* Diskquota specific options */ int s_frozen; wait_queue_head_t s_wait_unfrozen; char s_id[32]; /* Informational name */ u8 s_uuid[16]; /* UUID */ void *s_fs_info; /* Filesystem private info */ fmode_t s_mode; /* Granularity of c/m/atime in ns. Cannot be worse than a second */ u32 s_time_gran; /* * The next field is for VFS *only*. No filesystems have any business * even looking at it. You had been warned. */ struct mutex s_vfs_rename_mutex; /* Kludge */ /* * Filesystem subtype. If non-empty the filesystem type field * in /proc/mounts will be "type.subtype" */ char *s_subtype; /* * Saved mount options for lazy filesystems using * generic_show_options() */ char __rcu *s_options; const struct dentry_operations *s_d_op; /* default d_op for dentries */ /* * Saved pool identifier for cleancache (-1 means none) */ int cleancache_poolid; struct shrinker s_shrink; /* per-sb shrinker handle */ };
二、代码流程分析
Linux中实现mount操作需要一定的代码量,下面对Linux VFS Mount代码进行分析说明,整个分析过程按照mount操作函数调用流程进行。
代码分析基于Linux-3.2版本。
当用户在用户层执行mount命令时,会执行系统调用从用户态陷入linux内核,执行如下函数(namespace.c):
SYSCALL_DEFINE5(mount, char __user *, dev_name, char __user *, dir_name, char __user *, type, unsigned long, flags, void __user *, data) { int ret; char *kernel_type; char *kernel_dir; char *kernel_dev; unsigned long data_page; /* 获取mount类型 */ ret = copy_mount_string(type, &kernel_type); if (ret < 0) goto out_type; /* 获取mount点目录字符串 */ kernel_dir = getname(dir_name); if (IS_ERR(kernel_dir)) { ret = PTR_ERR(kernel_dir); goto out_dir; } /* 获取设备名称字符串 */ ret = copy_mount_string(dev_name, &kernel_dev); if (ret < 0) goto out_dev; /* 获取其它选项 */ ret = copy_mount_options(data, &data_page); if (ret < 0) goto out_data; /* 主要函数,执行挂载文件系统的具体操作 */ ret = do_mount(kernel_dev, kernel_dir, kernel_type, flags, (void *) data_page); free_page(data_page); out_data: kfree(kernel_dev); out_dev: putname(kernel_dir); out_dir: kfree(kernel_type); out_type: return ret; }
do_mount()函数是mount操作过程中的核心函数,在该函数中,通过mount的目录字符串找到对应的dentry目录项,然后通过do_new_mount()函数完成具体的mount操作。
do_mount()函数分析如下:
long do_mount(char *dev_name, char *dir_name, char *type_page, unsigned long flags, void *data_page) { struct path path; int retval = 0; int mnt_flags = 0; 。。。 /* 通过mount目录字符串获取path,path结构中包含有mount目录的dentry目录对象 */ retval = kern_path(dir_name, LOOKUP_FOLLOW, &path); if (retval) return retval; 。。。 /* Separate the per-mountpoint flags */ if (flags & MS_NOSUID) mnt_flags |= MNT_NOSUID; if (flags & MS_NODEV) mnt_flags |= MNT_NODEV; if (flags & MS_NOEXEC) mnt_flags |= MNT_NOEXEC; if (flags & MS_NOATIME) mnt_flags |= MNT_NOATIME; if (flags & MS_NODIRATIME) mnt_flags |= MNT_NODIRATIME; if (flags & MS_STRICTATIME) mnt_flags &= ~(MNT_RELATIME | MNT_NOATIME); if (flags & MS_RDONLY) mnt_flags |= MNT_READONLY; flags &= ~(MS_NOSUID | MS_NOEXEC | MS_NODEV | MS_ACTIVE | MS_BORN | MS_NOATIME | MS_NODIRATIME | MS_RELATIME| MS_KERNMOUNT | MS_STRICTATIME); /* remount操作 */ if (flags & MS_REMOUNT) retval = do_remount(&path, flags & ~MS_REMOUNT, mnt_flags, data_page); else if (flags & MS_BIND) retval = do_loopback(&path, dev_name, flags & MS_REC); else if (flags & (MS_SHARED | MS_PRIVATE | MS_SLAVE | MS_UNBINDABLE)) retval = do_change_type(&path, flags); else if (flags & MS_MOVE) retval = do_move_mount(&path, dev_name); else /* 正常的mount操作,完成具体的mount操作 */ retval = do_new_mount(&path, type_page, flags, mnt_flags, dev_name, data_page); dput_out: path_put(&path); return retval; }
do_new_mount()函数主要分成两大部分:
第一部分建立vfsmount对象和superblock对象,必要时从设备上获取文件系统元数据;
第二部分将vfsmount对象加入到mount树和Hash Table中,并且将原来的dentry对象无效掉。
do_new_mount函数说明如下:
static int do_new_mount(struct path *path, char *type, int flags, int mnt_flags, char *name, void *data) { struct vfsmount *mnt; int err; 。。。 /* 在内核建立vfsmount对象和superblock对象 */ mnt = do_kern_mount(type, flags, name, data); if (IS_ERR(mnt)) return PTR_ERR(mnt); /* 将vfsmount对象加入系统,屏蔽原有dentry对象 */ err = do_add_mount(mnt, path, mnt_flags); if (err) mntput(mnt); return err; }
do_new_mount()中的第一步:
调用do_kern_mount()函数,该函数的主干调用路径如下:
do_kern_mount--> vfs_kern_mount--> mount_fs
在mount_fs()函数中会调用特定文件系统的mount方法,如果mount是ext3文件系统,那么在mount_fs函数中最终会调用ext3的mount方法。
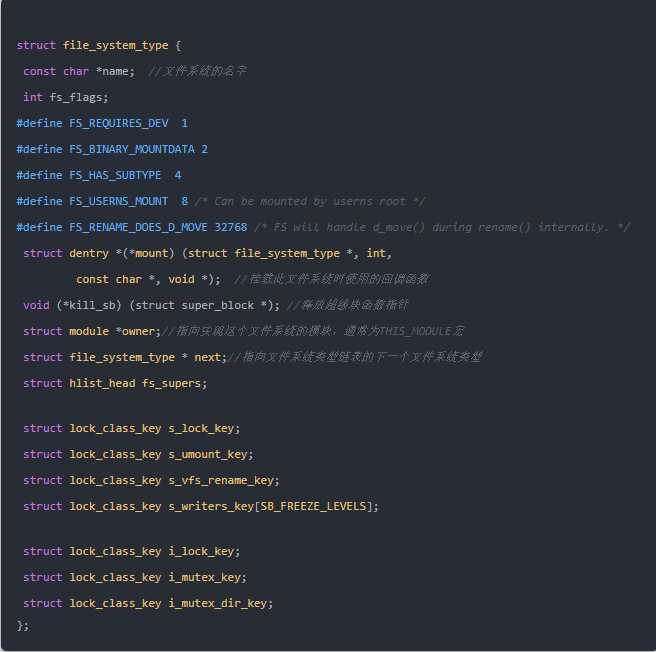
Ext3的mount方法定义在super.c文件中:
static struct file_system_type ext3_fs_type = { .owner = THIS_MODULE, .name = "ext3", .mount = ext3_mount, /* ext3文件系统mount方法 */ .kill_sb = kill_block_super, .fs_flags = FS_REQUIRES_DEV, };
ext3 mount函数主干调用路径为:
ext3_mount--> mount_bdev。
Mount_bdev()函数主要完成superblock对象的内存初始化,并且加入到全局superblock链表中。
该函数说明如下:
struct dentry *mount_bdev(struct file_system_type *fs_type, int flags, const char *dev_name, void *data, int (*fill_super)(struct super_block *, void *, int)) { struct block_device *bdev; struct super_block *s; fmode_t mode = FMODE_READ | FMODE_EXCL; int error = 0; if (!(flags & MS_RDONLY)) mode |= FMODE_WRITE; /* 通过设备名字获取被mount设备的bdev对象 */ bdev = blkdev_get_by_path(dev_name, mode, fs_type); if (IS_ERR(bdev)) return ERR_CAST(bdev); /* * once the super is inserted into the list by sget, s_umount * will protect the lockfs code from trying to start a snapshot * while we are mounting */ mutex_lock(&bdev->bd_fsfreeze_mutex); if (bdev->bd_fsfreeze_count > 0) { mutex_unlock(&bdev->bd_fsfreeze_mutex); error = -EBUSY; goto error_bdev; } /* 查找或者创建superblock对象 */ s = sget(fs_type, test_bdev_super, set_bdev_super, bdev); mutex_unlock(&bdev->bd_fsfreeze_mutex); if (IS_ERR(s)) goto error_s; if (s->s_root) { /* 被mount文件系统的根目录项已经存在 */ if ((flags ^ s->s_flags) & MS_RDONLY) { deactivate_locked_super(s); error = -EBUSY; goto error_bdev; } /* * s_umount nests inside bd_mutex during * __invalidate_device(). blkdev_put() acquires * bd_mutex and can't be called under s_umount. Drop * s_umount temporarily. This is safe as we're * holding an active reference. */ up_write(&s->s_umount); blkdev_put(bdev, mode); down_write(&s->s_umount); } else { /* 文件系统根目录项不存在,通过filler_super函数读取磁盘上的superblock元数据信息,并且初始化superblock内存结构 */ char b[BDEVNAME_SIZE]; s->s_flags = flags | MS_NOSEC; s->s_mode = mode; strlcpy(s->s_id, bdevname(bdev, b), sizeof(s->s_id)); sb_set_blocksize(s, block_size(bdev)); /* 对于ext3文件系统,调用ext3_fill_super函数 */ error = fill_super(s, data, flags & MS_SILENT ? 1 : 0); if (error) { deactivate_locked_super(s); goto error; } s->s_flags |= MS_ACTIVE; bdev->bd_super = s; } /* 正常返回被mount文件系统根目录项 */ return dget(s->s_root); error_s: error = PTR_ERR(s); error_bdev: blkdev_put(bdev, mode); error: return ERR_PTR(error); }
do_new_mount()函数的第二步:
是将创建的vfsmount对象加入到mount树和VFSMOUNT Hash Table中,并且将老的dentry目录项无效掉。
该过程主干函数调用过程如下所示:
do_new_mount--> do_add_mount--> graft_tree--> attach_recursive_mnt
attach_recursive_mnt()函数完成第二步过程的主要操作。
至此,文件系统的mount操作已经完成。
Mount完成之后,如果用户想要访问新mount文件系统中的文件,那么需要在path解析过程中重定位dentry,该过程主要在follow_managed()函数中完成。
在该函数中会判断一个dentry是否已经被标识成DCACHE_MOUNTED,如果该标志位已经被设置,那么通过VFSMOUNT Hash Table可以重定位dentry。






















 工商网监
工商网监
评论