 电子发烧友App
电子发烧友App


1. PCM是什么
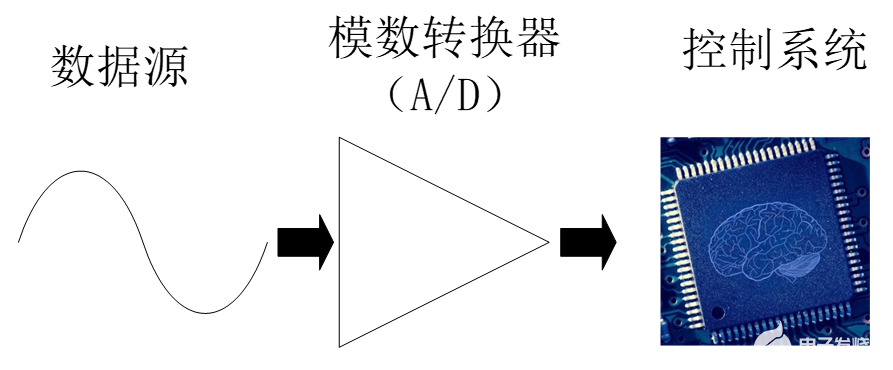
PCM是英文Pulse-code modulation的缩写,中文译名是脉冲编码调制。我们知道在现实生活中,人耳听到的声音是模拟信号,PCM就是要把声音从模拟转换成数字信号的一种技术,他的原理简单地说就是利用一个固定的频率对模拟信号进行采样,采样后的信号在波形上看就像一串连续的幅值不一的脉冲,把这些脉冲的幅值按一定的精度进行量化,这些量化后的数值被连续地输出、传输、处理或记录到存储介质中,所有这些组成了数字音频的产生过程。
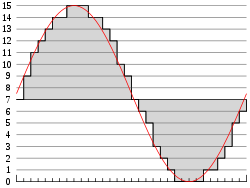
图1.1 模拟音频的采样、量化
PCM信号的两个重要指标是采样频率和量化精度,目前,CD音频的采样频率通常为44100Hz,量化精度是16bit。通常,播放音乐时,应用程序从存储介质中读取音频数据(MP3、WMA、AAC......),经过解码后,最终送到音频驱动程序中的就是PCM数据,反过来,在录音时,音频驱动不停地把采样所得的PCM数据送回给应用程序,由应用程序完成压缩、存储等任务。所以,音频驱动的两大核心任务就是:
playback 如何把用户空间的应用程序发过来的PCM数据,转化为人耳可以辨别的模拟音频
capture 把mic拾取到得模拟信号,经过采样、量化,转换为PCM信号送回给用户空间的应用程序
2. alsa-driver中的PCM中间层
ALSA已经为我们实现了功能强劲的PCM中间层,自己的驱动中只要实现一些底层的需要访问硬件的函数即可。
要访问PCM的中间层代码,你首先要包含头文件,另外,如果需要访问一些与 hw_param相关的函数,可能也要包含。
每个声卡最多可以包含4个pcm的实例,每个pcm实例对应一个pcm设备文件。pcm实例数量的这种限制源于linux设备号所占用的位大小,如果以后使用64位的设备号,我们将可以创建更多的pcm实例。不过大多数情况下,在嵌入式设备中,一个pcm实例已经足够了。
一个pcm实例由一个playback stream和一个capture stream组成,这两个stream又分别有一个或多个substreams组成。
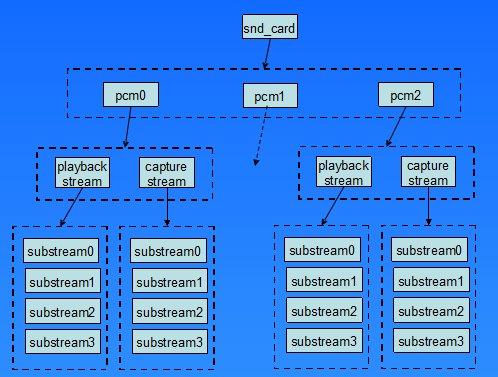
图2.1 声卡中的pcm结构
在嵌入式系统中,通常不会像图2.1中这么复杂,大多数情况下是一个声卡,一个pcm实例,pcm下面有一个playback和capture stream,playback和capture下面各自有一个substream。
下面一张图列出了pcm中间层几个重要的结构,他可以让我们从uml的角度看一看这列结构的关系,理清他们之间的关系,对我们理解pcm中间层的实现方式。
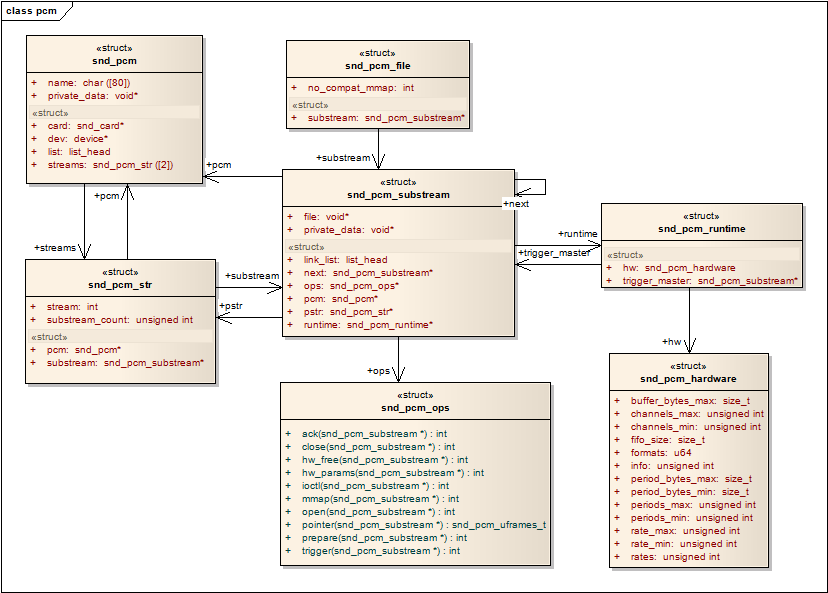
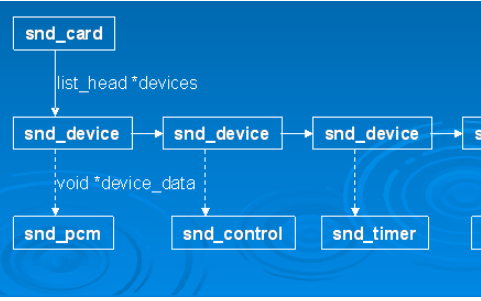
图2.2 pcm中间层的几个重要的结构体的关系图
snd_pcm是挂在snd_card下面的一个snd_device
snd_pcm中的字段:streams[2],该数组中的两个元素指向两个snd_pcm_str结构,分别代表playback stream和capture stream
snd_pcm_str中的substream字段,指向snd_pcm_substream结构
snd_pcm_substream是pcm中间层的核心,绝大部分任务都是在substream中处理,尤其是他的ops(snd_pcm_ops)字段,许多user空间的应用程序通过alsa-lib对驱动程序的请求都是由该结构中的函数处理。它的runtime字段则指向snd_pcm_runtime结构,snd_pcm_runtime记录这substream的一些重要的软件和硬件运行环境和参数。
3. 新建一个pcm
alsa-driver的中间层已经为我们提供了新建pcm的api:
int snd_pcm_new(struct snd_card *card, const char *id, int device, int playback_count, int capture_count,
struct snd_pcm ** rpcm);
参数device 表示目前创建的是该声卡下的第几个pcm,第一个pcm设备从0开始。
参数playback_count 表示该pcm将会有几个playback substream。
参数capture_count 表示该pcm将会有几个capture substream。
另一个用于设置pcm操作函数接口的api:
void snd_pcm_set_ops(struct snd_pcm *pcm, int direction, struct snd_pcm_ops *ops);
新建一个pcm可以用下面一张新建pcm的调用的序列图进行描述:
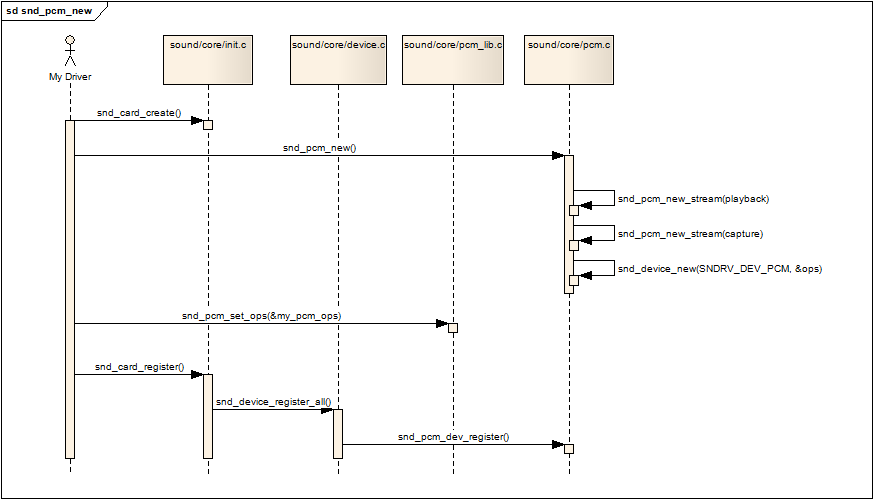
图3.1 新建pcm的序列图
snd_card_create pcm是声卡下的一个设备(部件),所以第一步是要创建一个声卡
snd_pcm_new 调用该api创建一个pcm,才该api中会做以下事情
如果有,建立playback stream,相应的substream也同时建立
如果有,建立capture stream,相应的substream也同时建立
调用snd_device_new()把该pcm挂到声卡中,参数ops中的dev_register字段指向了函数snd_pcm_dev_register,这个回调函数会在声卡的注册阶段被调用。
snd_pcm_set_ops 设置操作该pcm的控制/操作接口函数,参数中的snd_pcm_ops结构中的函数通常就是我们驱动要实现的函数
snd_card_register 注册声卡,在这个阶段会遍历声卡下的所有逻辑设备,并且调用各设备的注册回调函数,对于pcm,就是第二步提到的snd_pcm_dev_register函数,该回调函数建立了和用户空间应用程序(alsa-lib)通信所用的设备文件节点:/dev/snd/pcmCxxDxxp和/dev/snd/pcmCxxDxxc
4. 设备文件节点的建立(dev/snd/pcmCxxDxxp、pcmCxxDxxc)
4.1 struct snd_minor
每个snd_minor结构体保存了声卡下某个逻辑设备的上下文信息,他在逻辑设备建立阶段被填充,在逻辑设备被使用时就可以从该结构体中得到相应的信息。pcm设备也不例外,也需要使用该结构体。该结构体在include/sound/core.h中定义。
[c-sharp] view plain copy
struct snd_minor {
int type; /* SNDRV_DEVICE_TYPE_XXX */
int card; /* card number */
int device; /* device number */
const struct file_operations *f_ops; /* file operations */
void *private_data; /* private data for f_ops->open */
struct device *dev; /* device for sysfs */
};
在sound/sound.c中定义了一个snd_minor指针的全局数组:
[c-sharp] view plain copy
static struct snd_minor *snd_minors[256];
前面说过,在声卡的注册阶段(snd_card_register),会调用pcm的回调函数snd_pcm_dev_register(),这个函数里会调用函数snd_register_device_for_dev():
[c-sharp] view plain copy
static int snd_pcm_dev_register(struct snd_device *device)
{
......
/* register pcm */
err = snd_register_device_for_dev(devtype, pcm->card,
pcm->device,
&snd_pcm_f_ops[cidx],
pcm, str, dev);
......
}
我们再进入snd_register_device_for_dev():
[c-sharp] view plain copy
int snd_register_device_for_dev(int type, struct snd_card *card, int dev,
const struct file_operations *f_ops,
void *private_data,
const char *name, struct device *device)
{
int minor;
struct snd_minor *preg;
if (snd_BUG_ON(!name))
return -EINVAL;
preg = kmalloc(sizeof *preg, GFP_KERNEL);
if (preg == NULL)
return -ENOMEM;
preg->type = type;
preg->card = card ? card->number : -1;
preg->device = dev;
preg->f_ops = f_ops;
preg->private_data = private_data;
mutex_lock(&sound_mutex);
#ifdef CONFIG_SND_DYNAMIC_MINORS
minor = snd_find_free_minor();
#else
minor = snd_kernel_minor(type, card, dev);
if (minor >= 0 && snd_minors[minor])
minor = -EBUSY;
#endif
if (minor < 0) {
mutex_unlock(&sound_mutex);
kfree(preg);
return minor;
}
snd_minors[minor] = preg;
preg->dev = device_create(sound_class, device, MKDEV(major, minor),
private_data, "%s", name);
if (IS_ERR(preg->dev)) {
snd_minors[minor] = NULL;
mutex_unlock(&sound_mutex);
minor = PTR_ERR(preg->dev);
kfree(preg);
return minor;
}
mutex_unlock(&sound_mutex);
return 0;
}
首先,分配并初始化一个snd_minor结构中的各字段
type:SNDRV_DEVICE_TYPE_PCM_PLAYBACK/SNDRV_DEVICE_TYPE_PCM_CAPTURE
card: card的编号
device:pcm实例的编号,大多数情况为0
f_ops:snd_pcm_f_ops
private_data:指向该pcm的实例
根据type,card和pcm的编号,确定数组的索引值minor,minor也作为pcm设备的此设备号
把该snd_minor结构的地址放入全局数组snd_minors[minor]中
最后,调用device_create创建设备节点
4.2 设备文件的建立
在4.1节的最后,设备文件已经建立,不过4.1节的重点在于snd_minors数组的赋值过程,在本节中,我们把重点放在设备文件中。
回到pcm的回调函数snd_pcm_dev_register()中:
[c-sharp] view plain copy
static int snd_pcm_dev_register(struct snd_device *device)
{
int cidx, err;
char str[16];
struct snd_pcm *pcm;
struct device *dev;
pcm = device->device_data;
......
for (cidx = 0; cidx < 2; cidx++) {
......
switch (cidx) {
case SNDRV_PCM_STREAM_PLAYBACK:
sprintf(str, "pcmC%iD%ip", pcm->card->number, pcm->device);
devtype = SNDRV_DEVICE_TYPE_PCM_PLAYBACK;
break;
case SNDRV_PCM_STREAM_CAPTURE:
sprintf(str, "pcmC%iD%ic", pcm->card->number, pcm->device);
devtype = SNDRV_DEVICE_TYPE_PCM_CAPTURE;
break;
}
/* device pointer to use, pcm->dev takes precedence if
* it is assigned, otherwise fall back to card's device
* if possible */
dev = pcm->dev;
if (!dev)
dev = snd_card_get_device_link(pcm->card);
/* register pcm */
err = snd_register_device_for_dev(devtype, pcm->card,
pcm->device,
&snd_pcm_f_ops[cidx],
pcm, str, dev);
......
}
......
}
以上代码我们可以看出,对于一个pcm设备,可以生成两个设备文件,一个用于playback,一个用于capture,代码中也确定了他们的命名规则:
playback -- pcmCxDxp,通常系统中只有一各声卡和一个pcm,它就是pcmC0D0p
capture -- pcmCxDxc,通常系统中只有一各声卡和一个pcm,它就是pcmC0D0c
snd_pcm_f_ops
snd_pcm_f_ops是一个标准的文件系统file_operations结构数组,它的定义在sound/core/pcm_native.c中:
[c-sharp] view plain copy
const struct file_operations snd_pcm_f_ops[2] = {
{
.owner = THIS_MODULE,
.write = snd_pcm_write,
.aio_write = snd_pcm_aio_write,
.open = snd_pcm_playback_open,
.release = snd_pcm_release,
.llseek = no_llseek,
.poll = snd_pcm_playback_poll,
.unlocked_ioctl = snd_pcm_playback_ioctl,
.compat_ioctl = snd_pcm_ioctl_compat,
.mmap = snd_pcm_mmap,
.fasync = snd_pcm_fasync,
.get_unmapped_area = snd_pcm_get_unmapped_area,
},
{
.owner = THIS_MODULE,
.read = snd_pcm_read,
.aio_read = snd_pcm_aio_read,
.open = snd_pcm_capture_open,
.release = snd_pcm_release,
.llseek = no_llseek,
.poll = snd_pcm_capture_poll,
.unlocked_ioctl = snd_pcm_capture_ioctl,
.compat_ioctl = snd_pcm_ioctl_compat,
.mmap = snd_pcm_mmap,
.fasync = snd_pcm_fasync,
.get_unmapped_area = snd_pcm_get_unmapped_area,
}
};
snd_pcm_f_ops作为snd_register_device_for_dev的参数被传入,并被记录在snd_minors[minor]中的字段f_ops中。最后,在snd_register_device_for_dev中创建设备节点:
[c-sharp] view plain copy
snd_minors[minor] = preg;
preg->dev = device_create(sound_class, device, MKDEV(major, minor),
private_data, "%s", name);
4.3 层层深入,从应用程序到驱动层pcm
4.3.1 字符设备注册
在sound/core/sound.c中有alsa_sound_init()函数,定义如下:
[c-sharp] view plain copy
static int __init alsa_sound_init(void)
{
snd_major = major;
snd_ecards_limit = cards_limit;
if (register_chrdev(major, "alsa", &snd_fops)) {
snd_printk(KERN_ERR "unable to register native major device number %d/n", major);
return -EIO;
}
if (snd_info_init() < 0) {
unregister_chrdev(major, "alsa");
return -ENOMEM;
}
snd_info_minor_register();
return 0;
}
register_chrdev中的参数major与之前创建pcm设备是device_create时的major是同一个,这样的结果是,当应用程序open设备文件/dev/snd/pcmCxDxp时,会进入snd_fops的open回调函数,我们将在下一节中讲述open的过程。
4.3.2 打开pcm设备
从上一节中我们得知,open一个pcm设备时,将会调用snd_fops的open回调函数,我们先看看snd_fops的定义:
[c-sharp] view plain copy
static const struct file_operations snd_fops =
{
.owner = THIS_MODULE,
.open = snd_open
};
跟入snd_open函数,它首先从inode中取出此设备号,然后以次设备号为索引,从snd_minors全局数组中取出当初注册pcm设备时填充的snd_minor结构(参看4.1节的内容),然后从snd_minor结构中取出pcm设备的f_ops,并且把file->f_op替换为pcm设备的f_ops,紧接着直接调用pcm设备的f_ops->open(),然后返回。因为file->f_op已经被替换,以后,应用程序的所有read/write/ioctl调用都会进入pcm设备自己的回调函数中,也就是4.2节中提到的snd_pcm_f_ops结构中定义的回调。
[c-sharp] view plain copy
static int snd_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode);
struct snd_minor *mptr = NULL;
const struct file_operations *old_fops;
int err = 0;
if (minor >= ARRAY_SIZE(snd_minors))
return -ENODEV;
mutex_lock(&sound_mutex);
mptr = snd_minors[minor];
if (mptr == NULL) {
mptr = autoload_device(minor);
if (!mptr) {
mutex_unlock(&sound_mutex);
return -ENODEV;
}
}
old_fops = file->f_op;
file->f_op = fops_get(mptr->f_ops);
if (file->f_op == NULL) {
file->f_op = old_fops;
err = -ENODEV;
}
mutex_unlock(&sound_mutex);
if (err < 0)
return err;
if (file->f_op->open) {
err = file->f_op->open(inode, file);
if (err) {
fops_put(file->f_op);
file->f_op = fops_get(old_fops);
}
}
fops_put(old_fops);
return err;
}
下面的序列图展示了应用程序如何最终调用到snd_pcm_f_ops结构中的回调函数:
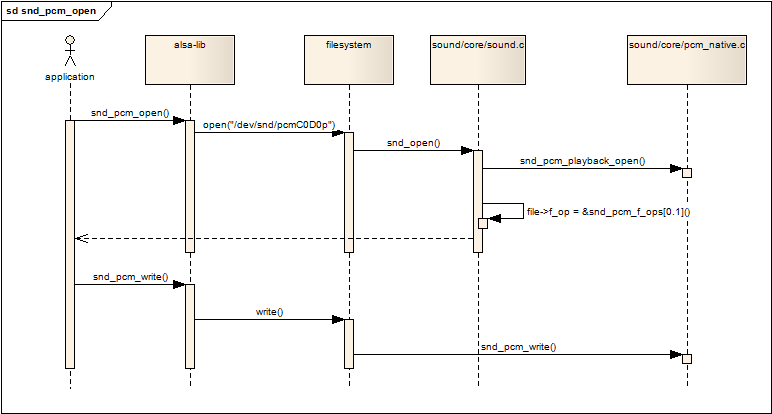
图4.3.2.1 应用程序操作pcm设备










 工商网监
工商网监
评论