 电子发烧友App
电子发烧友App


1. USB协议
1.1 USB主机系统
在USB主机系统中,通过根集线器与外部USB从机设备相连的处理芯片,称为USB主机控制器。USB主机控制器包含硬件、软件和固件一部分。
1.2 USB设备系统
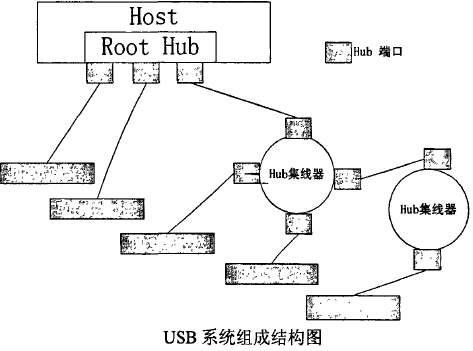
USB设备按功能分为两部分:集线器(Hub)和功能部件。从下图可知,主机通过根集线器连接到各种外围设备(集线器和功能部件)。
1.3 主机和设备之间通信模型
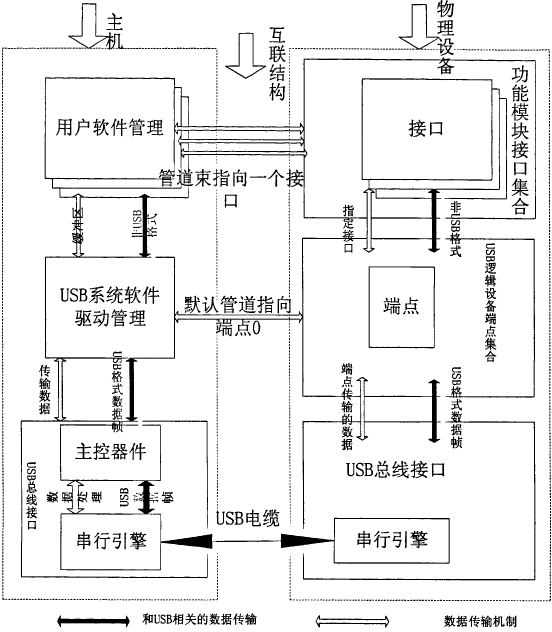
主机与设备之间的通信模型
上图展示了USB主机和USB设备之间的数据传输过程。在设备端,USB设备将非USB格式的数据进行打包处理,转换成USB格式的数据包,然后传递到链路层,经过硬件处理、传递到物理层,由物理层通过PHY以数据流的形式传输到主机。
USB主机在USB设备和USB主机之间发起的传输过程,稳为事务。每次事务以2到3个数据包的形式进行USB总线传输。每个数据包包含2到3个步骤:
1) USB主机控制器向USB设备发出命令
2) USB控制器和USB设备之间传递读写请求,其方向取决于第一部分的命令是读还是写
3) 握手信号。
USB主机控制器向USB设备发送事务类型请求,通过分组标识符来进行识别。
1.4 USB分组标识
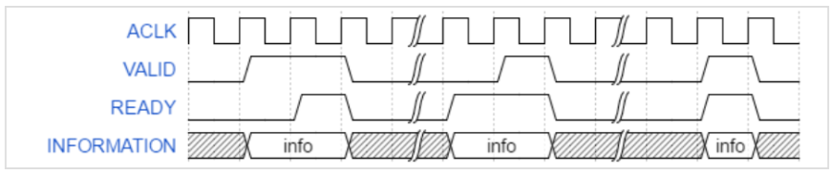
主机和设备之间进行操作,通过分组标识(PID)来进行传输。数据包传输格式一般由:PID、数据/控制信息、CRC校验码组成。
常见的PID主要包括令牌、数据、握手等类型组成。PID码以特定的方式组成,如下表所示:

PID分组码是数据传输流程中的重要元素。无论硬件还是软件,都要对PID分组码进行分析,从而做出正确响应。USB主机和设备严格按照PID分组码信息进行信息交互。
1.5 数据包传输模式
当USB设备连接到集线器,集线器状态将发生相应的变化,并将状态变化信息传递给USB主机。USB主机通过根集线器向USB设备发送命令,获取USB设备的各种信息,包含USB设备传输类型、ID号、Product、USB速度等信息。
USB主机和USB设备之间的数据传输共有四种类型:控制传输、批量传输、中断传输和同频传输。与之对应,USB主机和USB设备之间有四种事务:控制事务、批量事务、中断事务和同步事务。
1.5.1 批量(Bulk)传输
作用:主要用于非实时性传输,数据包较大而延时要求较低。
特点:数据传输准备即可,采用批量传输模式的USB从机设备,如U盘
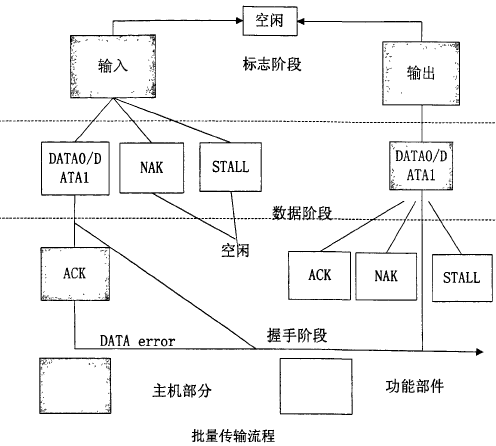
数据传输分三个阶段:
a) 令牌阶段:主机发送请求,USB设备依据请求PID来判断IN或OUT传输
b) 数据传输阶段:依据令牌阶段的IN或OUT传输,来决定数据传输为DATA0或DATA1来进行数据传输
c) 握手阶段:接收信息的一方发送ACK信号以表示接收成功;若为NAK,表示发送失败;STALL表示不可预知的错误
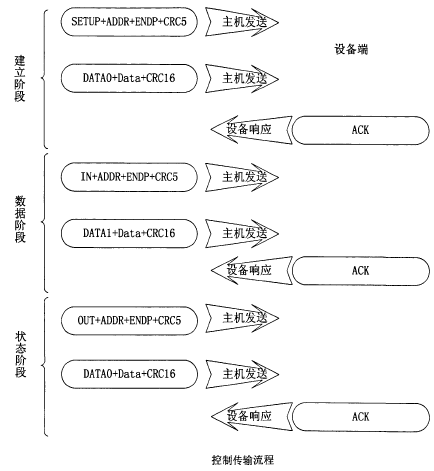
1.5.2 控制(Control)传输
作用:USB传输过程必须支持的传输模式。USB主机为了获取设备描述符、ID、Product等信息,向USB设备发送相应的PID命令。
特点:唯一可以进行IN/OUT传输的传输模式。
数据宽度:控制传输方式可以以8、16、32或64字节的数据进行传输,这取决于设备的传输速度。
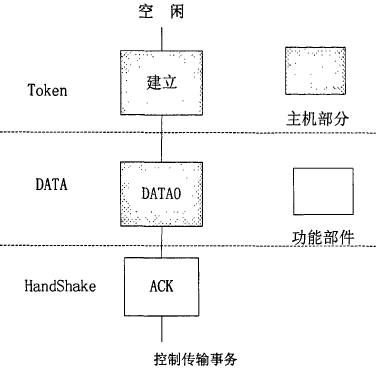
USB主机和设备之间必须支持控制传输,通过端点0进行数据传输。控制传输分为令牌、数据传输和握手阶段。
1.5.3 中断传输事务
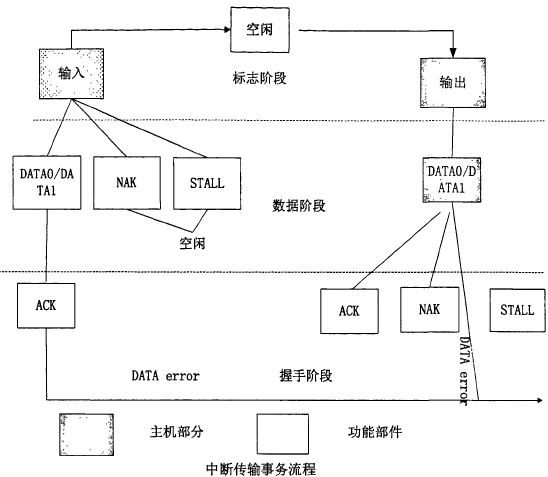
作用:按照一定时刻轮询设备是否有中断传输请求
特点:查询频率取决于端点的模式结构,从1到255ms不等
中断传输主要用于实时性要求非常高的从机设备,如键盘***杆和Mouse等
传输过程也分为令牌阶段、数据传输和握手阶段
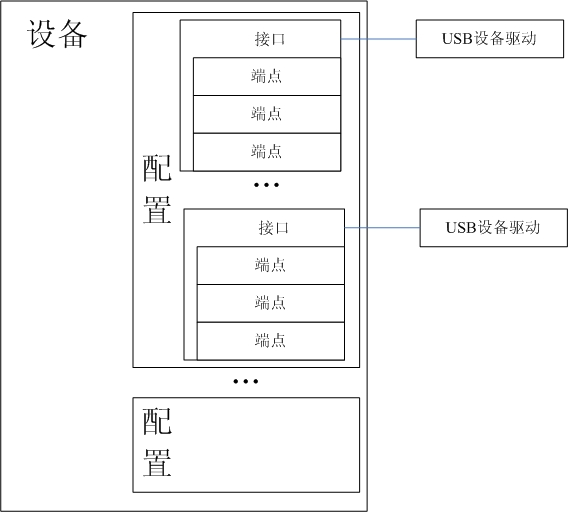
1.6 USB描述符
USB协议***定义了以下四种描述符:
1) 设备描述符
2) 配置描述符
3) 接口描述符
4) 端点描述符
其关系如下图所示:
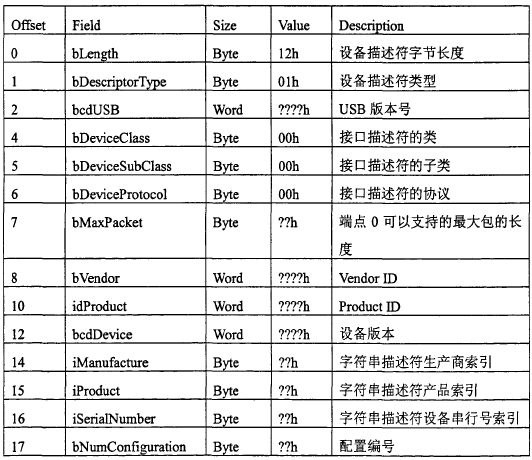
1.6.1 设备描述符
每个USB设备都有一个唯一的设备描述符,如下表所示:
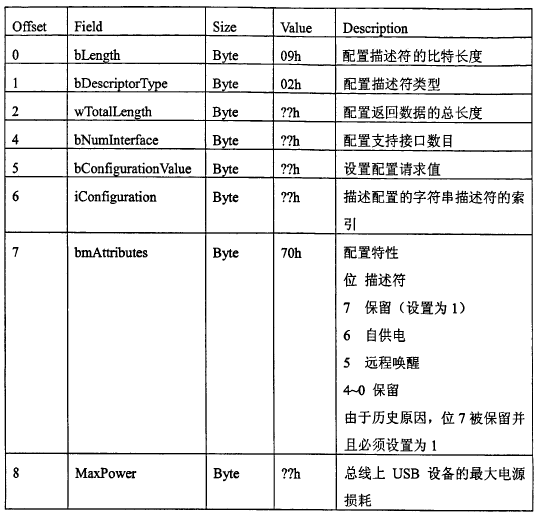
1.6.2 配置描述符
每个USB设备都有默认的配置描述符,支持至少一个接口,每个配置描述符如下表:
1.6.3 接口描述符
设备应至少支持一个接口,如:块传输数据接口,部分设备可能支持其它的接口。复合设备可以支持额外接口,以支持音频和视频功能。标准中并没有定义此类接口。接口可能有多个可选设置,主机将会检查每个可选的设置。
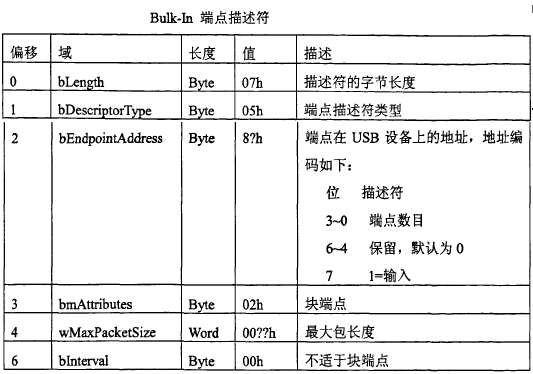
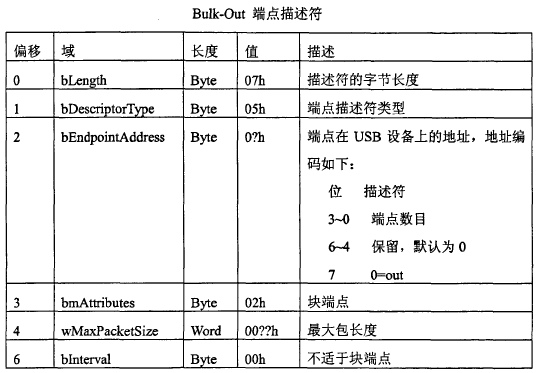
1.6.4 端点描述符
每个设备至少支持控制端点0。USB设备应该支持三类端点:控制端点、输入端点和输出端点。
2. OTG协议
OTG设备采用Mini-AB插座,相对于传统的USB数据线,Mini-AB接口多了一根数据线ID,ID线是否接入将Mini-AB接口分为Mini-A和Mini-B接口两种类型。在OTG设备之间数据连接的过程中,通过OTG数据线Mini-A和Mini-B接口来确定OTG设备的主从:接入Mini-A接口的设备默认为A设备(主机设备);接入Mini-B接口的设备,默认为B设备(从设备)。
A设备和B设备无需交换电缆接口,即可通过主机交换协议(HNP)实现A、B设备之间的角色互换。同时,为了节省电源,OTG允许总线空闲时A设备判断电源。此时,若B设备希望使用总线,可以通过会话请求协议(SRP)请求A设备提供电源。
2.1 HNP(主机交换)协议
当Mini-A接口接入A设备并确定A设备为主机时;若B设备希望成为主机,则A设备向B设备发送SetFeature命令,允许B设备进行主机交换。B设备检测到总线挂起5ms后,即挂起D+并启动HNP,使总线处于SE0状态。此时A设备检测到总线处于SE0状态,即认为B设备发起主机交换,A设备进行响应。待B设备发现D+线为高电平而D-线为低电平(J状态),表示A设备识别了B设备的HNP请求。B设备开始总线复位并具有总线控制权,主机交换协议完成。
2.2 SRP(会话请求)协议
对于主机,要求能响应会话请求;对于设备,仅要求能够发起SRP协议。OTG设备,不仅要求发起SRP,而且还能响应SRP请求。
SRP分为数据线脉冲调制和电压脉冲调两种方式,B设备发起SRP必须满足以下两个条件:
1) B设备检测到A设备低于其有效的电压阈值,同时B设备低于有效的电压阈值。
2) B设备必须检测到D+和D-数据线至少在2ms的时间内低于有效阈值,即处于SE0状态。
数据线脉冲调制会话请求:B设备必须等到满足以上两个条件后,将数据线接入上拉电阻一定的时间,以备A设备过滤数据线上的瞬间电压。与此同时,B设备上拉D+以便于在全速模式下进行初始化操作。A设备在检测到D+变为高电平或D-变为低电平时产生SRP指示信号。
Vbus脉冲调制会话请求:B设备同样需等待满足上述两个初始化条件,然后B设备通过对电容充电以提高总线电压,待达到总线上的电压阈值,唤醒A设备。在充电过程中,一定要保证充电的电压峰值在一定的范围以避免烧坏A设备。
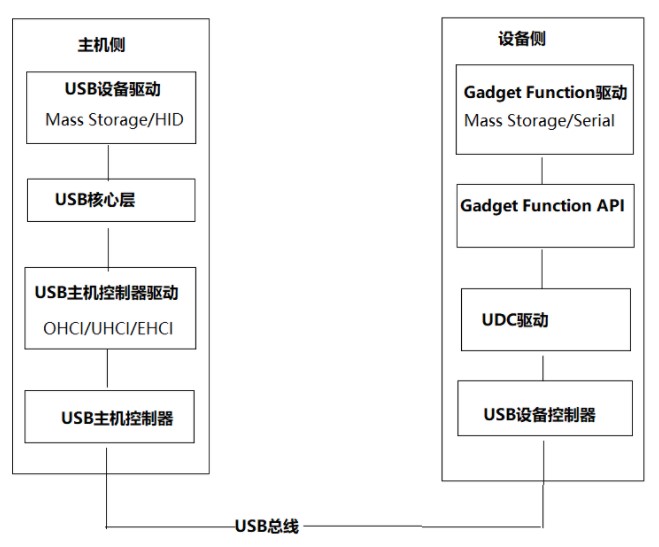
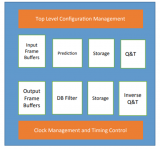
3. USB驱动架构
USB驱动架构如下图所示:
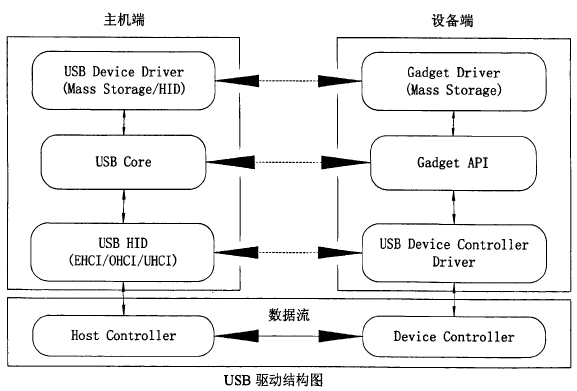
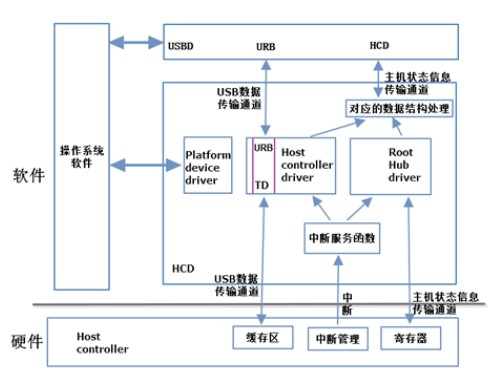
3.1 USB主机端驱动

USB核心(USBD)是整个USB驱动的核心部分,从上图可知,一方面USBD对接收到USB主机控制器的数据进行处理,并传递给上层的设备端驱动软件;同时也接收来自上层的非USB格式数据流,进行相应的数据处理后传递给USB主机控制器驱动。
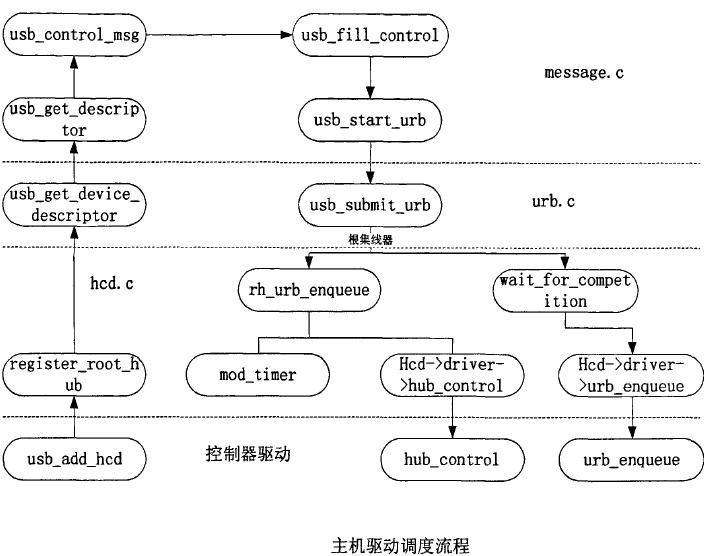
USB数据传输都以URB(USB Request Block)请求、URB生成、URB递交、URB释放为主线。从上图可知,当加载控制器驱动之后,注册根据集线器,hub和hcd驱动成为一个整体。接着,主机通过控制传输获取设备的控制描述符等信息,接着详述整个控制传输的流程。usb_submit_urb依据是否连接到根集线器来决定调用urb_enqueue或rh_urb_enqueue函数。
USB从设备通过集线器或根集线器连接到USB主机上。比如:主机通过根集线器与外界进行数据交互,根集线器通过探测数据线状态的变化来通知USB主机是否有USB外围设备接入。
在主机端控制器驱动加载的过程中,注册了根集线器,然后匹配了相应的hub驱动程序,同时完成了对Hub的轮询函数和状态处理函数的设置。这样,一旦hub集线器的状态发生变化,就会产生相应的中断,主机端控制器就会执行相应的中断处理函数,下图为hub驱动程序的流程图。
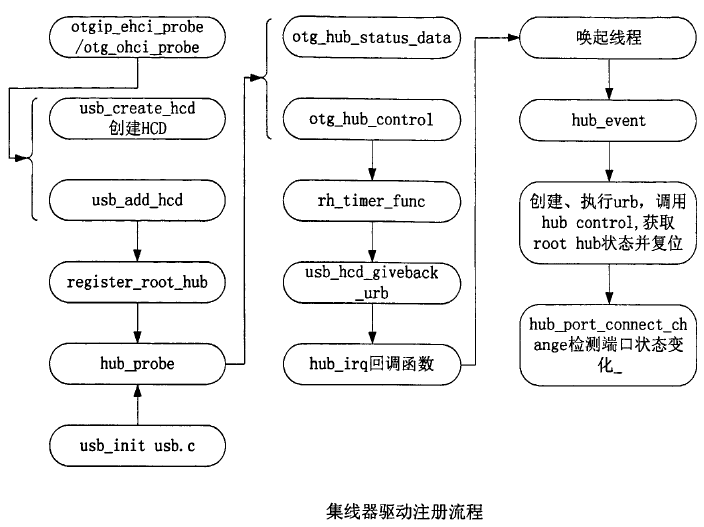
USB Core中的usb_init()函数中完成了对hub线程(khubd,在usb_hub_init函数中真正地创建)的创建,然后完成相应设备的探测。主机端控制器驱动进行探测时,将hub驱动和主机端控制器驱动结合在一起,相互之间完成调用。 相对于大容量存储设备与主机之间通过控制/批量传输,集线器与主机之间通过中断/控制方式完成数据交互。
3.2 USB设备端驱动
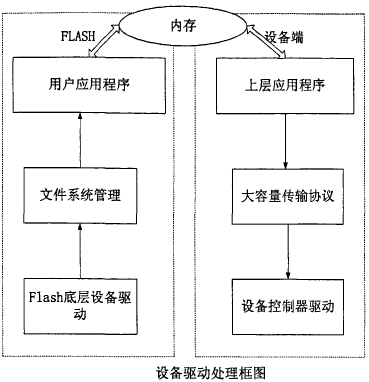
从上图可知,设备端驱动包含两部分:
1) 底层设备控制器驱动
2) 上层大容量存储类驱动
3.2.1 设备控制器驱动
USB设备控制器驱动主要实现Gadget API定义的函数和中断服务函数,可按功能划分为:API函数实现模块和中断处理模块。
API函数主要实现Gadget API定义的函数功能,如结构体usb_ep_ops和usb_gadget_ops中的函数、usb_gadget_register_driver函数。这些函数是供Gadget Driver调用。
中断处理模块主要处理设备控制器产生的各种中断,包括端点中断、复位、挂起等中断。
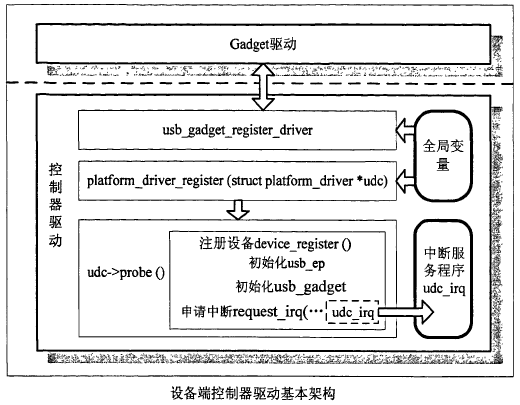
上图为设备端控制器基本架构,主要完成了Gadget驱动和控制器驱动绑定、usb_gadget_register_driver注册。
3.3 OTG驱动
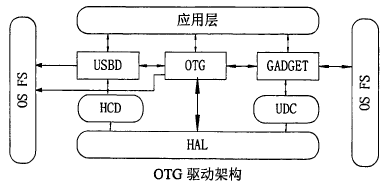
OS_FS: 文件系统
USBD: USB核心
HCD: 主机控制器驱动
UDC: 设备端控制器驱动
OTG设备支持HNP和SRP协议。OTG设备通过USB OTG电缆连接到一起,其中接Mini-A接口的设备为A设备,默认为主机端,Mini-B接口的设备默认为B设备。当A、B设备完成数据交互之后,A、B设备之间的USB OTG电缆进入挂起状态,如下图所示:
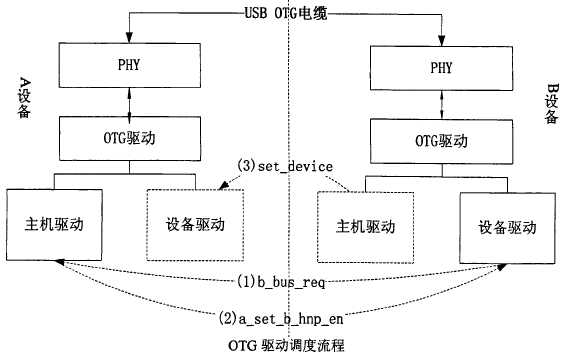
当B设备写入b_bus_req,向A设备发起HNP请求。待A设备响应之后,A设备发送a_set_b_hnp_en,B设备响应之后即进入主机状态,同时发送请求使用A设备set_device,这样A、B设备完成主从交换。
4. USB 传输流程
4.1 USB初始化过程
USB驱动作为一个系统,集成了众多的驱动模块,注册过程非常复杂。从USB系统的角度来说,USB主机驱动主要包含:
1) USB核驱动
2) 主机控制器驱动
3) 集线器驱动
驱动的加载执行流程如下图所示:
USB初始化过程
4.1.1 USB Core的初始化
USB驱动从USB子系统的初始化开始,USB子系统的初始化在文件driver/usb/core/usb.c
subsys_initcall(usb_init);
module_exit(usb_exit);
subsys_initcall()是一个宏,可以理解为module_init()。由于此部分代码非常重要,开发者把它看作一个子系统,而不仅仅是一个模块。USB Core这个模块代表的不是某一个设备,而是所有USB设备赖以生存的模块。在Linux中,像这样一个类别的设备驱动被归结为一个子系统。subsys_initcall(usb_init)告诉我们,usb_init才是真正的初始化函数,而usb_exit将是整个USB子系统结束时的清理函数。
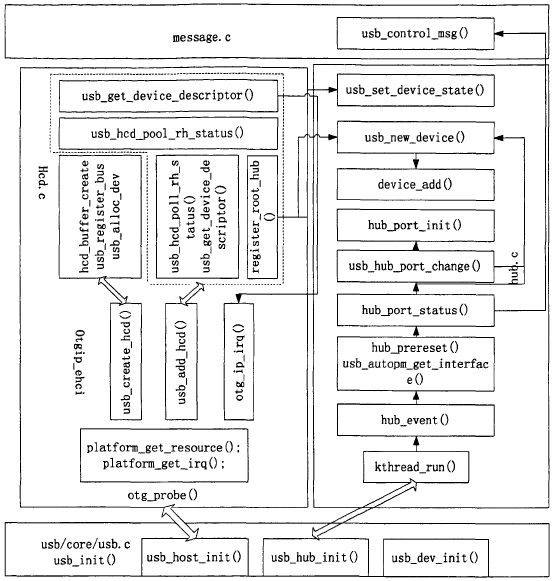
4.1.2 主机控制器的初始化及驱动执行(以EHCI为例)
module_init(otg_init); 模块注册
static init __init otg_init(void);
platform_driver_register(); 平台注册
static int __init otg_probe(struct platform_device *pdev); 探测处理函数
reg = platform_get_resource(pdev, IORESOURCE_MEM, 0); 获取寄存器信息
data = platform_get_resource(pdev,IORESOURCE_MEM, 1); 获取内存信息
irq = platform_get_irq(pdev,0); 获取中断号
usb_create_hcd(&otg_hc_driver, &pdev->dev, pdev->dev.bus_id);
分配和初始化HCD结构体。对设备数据空间进行分配,初始化计数器、总线、定时器、hcd结构体各成员值。
ret = usb_add_hcd(hcd,irq,SA_INTERRUPT);
完成HCD结构体的初始化和注册。申请buffer,注册总线、分配设备端内存空间,向中断向量表中申请中断,注册根集线器,对根集线器状态进行轮询。
4.1.3 注册集线器
register_root_hub(hcd);
在USB系统驱动加载的过程中,创建了集线器的线程(khubd),并且一直查询相应的线程事务。HCD驱动中,将集线器作为一个设备添加到主机控制器驱动中,然后进行集线器端口的初始化。在USB主机看来,根集线器本身也是USB主机的设备。USB主机驱动加载完成之后,即开始注册根集线器,并且作为一个设备加载到主机驱动之中。
USB主机和USB设备之间进行数据交互,USB设备本身并没有总线控制权,U盘被动地接收USB主机发送过来的信息并做出响应。USB主机控制器与根集线器构成了主机系统,然后外接其它的USB设备。
为了更好地探测到根集线器的状态变化,USB主机控制器驱动增加了状态轮询函数,以一定的时间间隔轮询根集线器状态是否发生变化。一旦根集线器状态发生变化,主机控制器就会产生相应的响应。
USB主机和USB设备之间的数据传输以URB(USB Request Block)的形式进行。
4.2 URB传输过程
USB初始化过程中,无论是主机控制器驱动还是根集线器驱动,都是通过URB传输获取设备信息。
4.2.1 申请URB
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags)
为urb分配内存并执行初始化。
4.2.2 初始化URB
初始化具体的urb包
static inline void usb_fill_bulk_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context)
static inline void usb_fill_control_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
unsigned char *setup_packet,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context)
static inline void usb_fill_int_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context,
int interval)
不同的传输模式下,驱动为之申请不同的URB。其中,Linux内核只支持同步传输外的三种传输事件,ISO事务需要手工进行初始化工作。控制传输事务、批量传输事务、中断传输事务API如上所示。
三种事务传输模式下的URB初始化函数有很多相似之处,主要参数含义如下:
• urb: 事务传输中的urb
• dev: 事务传输的目的设备
• pipe: USB主机与USB设备之间数据传输的通道
• transfer_buffer: 发送数据所申请的内存缓冲区首地址
• length: 发送数据缓冲区的长度
• context: complete函数的上下文
• complete_fn: 调用完成函数
• usb_fill_control_urb()的setup_packet: 即将被发送的设备数据包
• usb_fill_int_urb()的interval: 中断传输中两个URB调度的时间间隔
4.2.3 提交URB
URB初始化完成之后,USBD开始通过usb_start_wait_urb()提交urb请求(它调用usb_submit_urb来真正的发送URB请求),添加completition函数。
接下来,从message.c传到主机控制器(hcd.c),开始真正的usb_hcd_submit_urb()。此时,根据是否为根集线器,进入不同的工作队列。
usb_start_wait_urb->
usb_submit_urb->
usb_hcd_submit_urb
a) root_hub传输
若为root hub,将调用rh_urb_enqueue(),共有两种传输事务(控制传输和中断传输)
static int rh_urb_enqueue (struct usb_hcd *hcd, struct urb *urb)
{
if (usb_endpoint_xfer_int(&urb->ep->desc)) // 中断传输
return rh_queue_status (hcd, urb);
if (usb_endpoint_xfer_control(&urb->ep->desc)) // 控制传输
return rh_call_control (hcd, urb);
return -EINVAL;
}
b) 非root_hub传输
对于非常root_hub传输,它调用:
status = hcd->driver->urb_enqueue(hcd, urb, mem_flags);
c) 批量传输
root_hub本身没有批量传输流程,按照控制传输流程,控制传输最终要通过switch语句跳转到Bulk-Only传输流程中。











 工商网监
工商网监
评论