 电子发烧友App
电子发烧友App


上篇说到printk调试,但printk是 全局的 ,只能设置输出等级。而动态输出可以动态选择打开某个内核子系统的输出,可以有选择性地打开某些模块的输出。
配置内核编译选项
要使用动态输出,必须在配置内核时打开CONFIG_DYNAMIC_DEBUG宏。内核代码里使用大量pr_debug()/dev_dbg()函数来输出信息,这些就使用了动态输出。
需要打开的内核配置选项:
CONFIG_DEBUG_FS=y
CONFIG_DYNAMIC_DEBUG=y
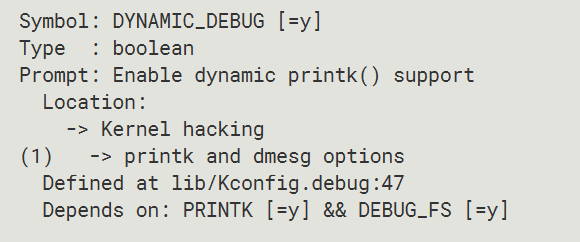
CONFIG_DYNAMIC_DEBUG是配置动态输出,它依赖于CONFIG_DEBUG_FS,而CONFIG_DEBUG_FS是debugfs 文件系统 。
打开内核配置后,我们还需要挂载debugfs 文件系统 。
debugfs文件系统挂载
动态输出在debugfs文件系统中有一个control文件节点,这个文件节点记录了系统中所有使用动态输出技术的 文件名路径、输出所在的行号、模块名字和要输出的语句 。
debugfs默认会挂载到/sys/kernel/debug,如果没有挂载,可以执行以下命令挂载:
# mount -t debugfs none /sys/kernel/debug/
挂载debugfs文件系统后,可以查看control节点内容:
# cat /sys/kernel/debug/dynamic_debug/control
动态输出使用
打开svcsock.c文件中所有的动态输出语句
# echo 'file svcsock.c +p' > /sys/kernel/debug/dynamic_debug/control
打开usbcore模块中所有的动态输出语句
# echo 'module usbcore +p' > /sys/kernel/debug/dynamic_debug/control
打开svc_process()函数中所有的动态输出语句
# echo 'func svc_process() +p' > /sys/kernel/debug/dynamic_debug/control
打开文件路径包含usb的文件里所有的动态输出语句
# echo -n '*usb* +p' > /sys/kernel/debug/dynamic_debug/control
打开系统所有的动态输出语句
# echo -n '+p' > /sys/kernel/debug/dynamic_debug/control
上面是打开动态输出语句的例子,除了能输出pr_debug()/dev_dbg()函数中定义的输出信息外,还能输出一些额外信息,如函数名、行号、模块名字以及线程ID等
- p:打开动态输出语句
- f:输出函数名
- l:输出行号
- m:输出模块名字
- t:输出线程ID
另外,还可以在各个子系统的Makefile中添加ccflags来打开动态输出语句
< ../Makefile >
ccflags-y += -DDEBUG
ccflags-y += -DVERBOSE_DEBUG
实际案例
例如在一个led驱动中的open()、write()等函数开头添加一句pr_debug("%s enter\\n", **func **** ** );
#include < linux/module.h >
#include < linux/fs.h >
#include < linux/errno.h >
#include < linux/miscdevice.h >
#include < linux/kernel.h >
#include < linux/major.h >
#include < linux/mutex.h >
#include < linux/proc_fs.h >
#include < linux/seq_file.h >
#include < linux/stat.h >
#include < linux/init.h >
#include < linux/device.h >
#include < linux/tty.h >
#include < linux/kmod.h >
#include < linux/gfp.h >
static int major = 0;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a, b) (a < b ? a : b)
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
pr_debug("%s enter\\n", __func__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
pr_debug("%s enter\\n", __func__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{
pr_debug("%s enter\\n", __func__);
return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{
pr_debug("%s enter\\n", __func__);
return 0;
}
/* 2. 定义自己的file_operations结构体 */
static struct file_operations hello_drv = {
.owner = THIS_MODULE,
.open = hello_drv_open,
.read = hello_drv_read,
.write = hello_drv_write,
.release = hello_drv_close,
};
static int __init hello_init(void)