 电子发烧友App
电子发烧友App


作者:田勇 OpenHarmony知识体系工作组
现在市面上有很多APP,都或多或少对图片有模糊上的设计,所以,图片模糊效果到底怎么实现的呢? 首先,我们来了解下模糊效果的对比 从视觉上,两张图片,有一张是模糊的,那么,在实现图片模糊效果之前,我们首先需要了解图片模糊的本质是什么? 在此介绍模糊本质之前,我们来了解下当前主流的两个移动端平台(Android与iOS)的实现。 对Android开发者而言,比较熟悉且完善的图片变换三方库以glide-transformations(https://github.com/wasabeef/glide-transformations)为样例,来看看它是基于什么实现的。 Android中有两种实现: 1、FastBlur,根据stackBlur模糊算法来操作图片的像素点实现效果,但效率低,已过时。 2、RenderScript,这个是Google官方提供的,用来在Android上编写一套高性能代码的语言,可以运行在CPU及其GPU上,效率较高。 而对iOS开发者而言,GPUImage(https://github.com/BradLarson/GPUImage/)比较主流。我们可以在其中看到高斯模糊过滤器(GPUImageGaussianBlurFilter),它里面是根据OpenGL来实现,通过GLSL语言定义的着色器,操作GPU单元,达到模糊效果。 所以,我们可以看出,操作GPU来达到我们所需要的效果效率更高。因此我们在OpenHarmony上也能通过操作GPU,来实现我们想要的高性能模糊效果。 回归正题,先来了解下模糊的本质是什么?
本质
模糊,可以理解为图片中的每个像素点都取其周边像素的平均值。
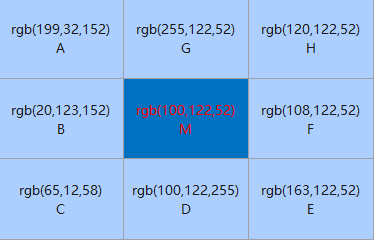
上图M点的像素点就是我们的焦点像素。周围ABCDEFGH都是M点(焦点)周围的像素点,那么根据模糊的概念: M(rgb) =(A+B+C+D+E+F+G+H)/ 8 我们根据像素点的r、g、b值,得到M点的像素点值,就这样,一个一个像素点的操作,中间点相当于失去视觉上的焦点,整个图片就产生模糊的效果。但这样一边倒的方式,在模糊的效果上,达不到需求的,所以,我们就需要根据这个模糊的本质概念,去想想,加一些东西或者更改取平均值的规则,完成我们想要的效果。故,高斯模糊,一个家喻户晓的名字,就出现在我们面前。
高斯模糊
高斯模糊,运用了正态分布函数,进行各个加权平均,正态分布函数如下:
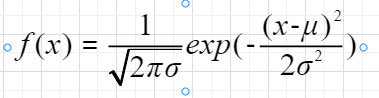
其中参数:μ为期望值,σ为标准差,当μ=0,σ=0的时候,为标准的正态分布,其形状参考如下图:
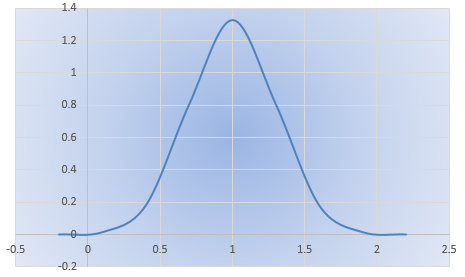
可以看出: 其一,离中心点越近,分配的权重就越高。这样我们在计算图片的焦点像素值时,将该点当作中心点,当作1的权重,其他周围的点,按照该正态分布的位置,去分配它的权重,这样我们就可以根据该正态分布函数及其各个点的像素ARGB值,算出经过正态分布之后的像素ARGB值。 其二,离中心点越近,若是设置的模糊半径很小,代表其模糊的焦点周围的像素点离焦点的像素相差就不大,这样模糊的效果就清晰。而模糊半径越大,其周围分布的像素色差就很大,这样的模糊效果就越模糊。 通过图片的宽高拿到每个像素点的数据,再根据这个正态分布公式,得到我们想要的像素点的ARGB值,之后将处理过的像素点重新写入到图片中,就能实现我们想要的图片模糊效果。
流程
根据上面的阐述,就可以梳理出在OpenHarmony中的具体的实现流程: ●获取整张图片的像素点数据 ●循环图片的宽高,获取每个像素点的焦点 ●在上述循环里,根据焦点按照正态分布公式进行加权平均,算出各个焦点周围新的像素值 ●将各个像素点写入图片 关键依赖OpenHarmony系统基础能力如下: 第一、获取图片的像素点,系统有提供一次性获取整张图片的像素点数据,其接口如下。
readPixelsToBuffer(dst: ArrayBuffer): Promise可以看出,系统将获取到像素点数据ARGB值,存储到ArrayBuffer中去。 第二、循环获取每个像素点,将其x、y点的像素点当作焦点。; readPixelsToBuffer(dst: ArrayBuffer, callback: AsyncCallback ): void;
for (y = 0; y < imageHeight; y++) {
for (x = 0; x < imageWidth; x++) {
//...... 获取当前的像素焦点x、y
}
}
第三、循环获取焦点周围的像素点(以焦点为原点,以设置的模糊半径为半径)。
for ( let m = centPointY-radius; m < centPointY+radius; m++) {
for ( let n = centPointX-radius; n < centPointX+radius; n++) {
//......
this.calculatedByNormality(...); //正态分布公式化处理像素点
//......
}
}
第四、将各个图片的像素数据写入图片中。系统有提供一次性写入像素点,其接口如下。
writeBufferToPixels(src: ArrayBuffer): Promise通过上面的流程,我们可以在OpenHarmony系统下,获取到经过正态分布公式处理的像素点,至此图片模糊效果已经实现。 但是,经过测试发现,这个方式实现模糊化的过程,很耗时,达不到我们的性能要求。若是一张很大的图片,就单单宽高循环来看,比如1920*1080宽高的图片就要循环2,073,600次,非常耗时且对设备的CPU也有非常大的消耗,因此我们还需要对其进行性能优化。; writeBufferToPixels(src: ArrayBuffer, callback: AsyncCallback ): void;
模糊性能优化思路
如上面所诉,考虑到OpenHarmony的环境的特点及其系统提供的能力,可以考虑如下几个方面进行优化: 第一、参照社区已有成熟的图片模糊算法处理,如(Android的FastBlur)。 第二、C层性能要比JS层更好,将像素点的数据处理,通过NAPI机制,将其放入C层处理。如:将其循环获取焦点及其通过正态分布公式处理的都放到C层中处理。 第三、基于系统底层提供的OpenGL,操作顶点着色器及片元着色器操作GPU,得到我们要的模糊效果。 首先,我们来根据Android中的FastBlur模糊化处理,参照其实现原理进行在基于OpenHarmony系统下实现的代码如下:
let imageInfo = await bitmap.getImageInfo(); let size = { width: imageInfo.size.width, height: imageInfo.size.height } if (!size) { func(new Error("fastBlur The image size does not exist."), null) return; } let w = size.width; let h = size.height; var pixEntry: Array从上面代码,可以看出,按照FastBlur的逻辑,还是逃不开上层去处理单个像素点,逃不开图片宽高的循环。经过测试也发现,在一张400*300的图片上,完成图片的模糊需要十几秒,所以第一个优化方案,在js环境上是行不通的。 其次,将其像素点处理,通过NAPI的机制,将像素点数据ArrayBuffer传入到C层,由于在C层也需要循环去处理每个像素点,传入大数据的ArrayBuffer时对系统的native的消耗严重。最后经过测试也发现,模糊的过程也很缓慢,达不到性能要求。 所以对比分析之后,最终的优化方案是采取系统底层提供的OpenGL,通过GPU去操作系统的图形处理器,解放出CPU的能力。= new Array() var pix: Array = new Array() let bufferData = new ArrayBuffer(bitmap.getPixelBytesNumber()); await bitmap.readPixelsToBuffer(bufferData); let dataArray = new Uint8Array(bufferData); for (let index = 0; index < dataArray.length; index+=4) { const r = dataArray[index]; const g = dataArray[index+1]; const b = dataArray[index+2]; const f = dataArray[index+3]; let entry = new PixelEntry(); entry.a = 0; entry.b = b; entry.g = g; entry.r = r; entry.f = f; entry.pixel = ColorUtils.rgb(entry.r, entry.g, entry.b); pixEntry.push(entry); pix.push(ColorUtils.rgb(entry.r, entry.g, entry.b)); } let wm = w - 1; let hm = h - 1; let wh = w * h; let div = radius + radius + 1; let r = CalculatePixelUtils.createIntArray(wh); let g = CalculatePixelUtils.createIntArray(wh); let b = CalculatePixelUtils.createIntArray(wh); let rsum, gsum, bsum, x, y, i, p, yp, yi, yw: number; let vmin = CalculatePixelUtils.createIntArray(Math.max(w, h)); let divsum = (div + 1) >> 1; divsum *= divsum; let dv = CalculatePixelUtils.createIntArray(256 * divsum); for (i = 0; i < 256 * divsum; i++) { dv[i] = (i / divsum); } yw = yi = 0; let stack = CalculatePixelUtils.createInt2DArray(div, 3); let stackpointer, stackstart, rbs, routsum, goutsum, boutsum, rinsum, ginsum, binsum: number; let sir: Array ; let r1 = radius + 1; for (y = 0; y < h; y++) { rinsum = ginsum = binsum = routsum = goutsum = boutsum = rsum = gsum = bsum = 0; for (i = -radius; i <= radius; i++) { p = pix[yi + Math.min(wm, Math.max(i, 0))]; sir = stack[i + radius]; sir[0] = (p & 0xff0000) >> 16; sir[1] = (p & 0x00ff00) >> 8; sir[2] = (p & 0x0000ff); rbs = r1 - Math.abs(i); rsum += sir[0] * rbs; gsum += sir[1] * rbs; bsum += sir[2] * rbs; if (i > 0) { rinsum += sir[0]; ginsum += sir[1]; binsum += sir[2]; } else { routsum += sir[0]; goutsum += sir[1]; boutsum += sir[2]; } } stackpointer = radius; for (x = 0; x < w; x++) { r[yi] = dv[rsum]; g[yi] = dv[gsum]; b[yi] = dv[bsum]; rsum -= routsum; gsum -= goutsum; bsum -= boutsum; stackstart = stackpointer - radius + div; sir = stack[stackstart % div]; routsum -= sir[0]; goutsum -= sir[1]; boutsum -= sir[2]; if (y == 0) { vmin[x] = Math.min(x + radius + 1, wm); } p = pix[yw + vmin[x]]; sir[0] = (p & 0xff0000) >> 16; sir[1] = (p & 0x00ff00) >> 8; sir[2] = (p & 0x0000ff); rinsum += sir[0]; ginsum += sir[1]; binsum += sir[2]; rsum += rinsum; gsum += ginsum; bsum += binsum; stackpointer = (stackpointer + 1) % div; sir = stack[(stackpointer) % div]; routsum += sir[0]; goutsum += sir[1]; boutsum += sir[2]; rinsum -= sir[0]; ginsum -= sir[1]; binsum -= sir[2]; yi++; } yw += w; } for (x = 0; x < w; x++) { rinsum = ginsum = binsum = routsum = goutsum = boutsum = rsum = gsum = bsum = 0; yp = -radius * w; for (i = -radius; i <= radius; i++) { yi = Math.max(0, yp) + x; sir = stack[i + radius]; sir[0] = r[yi]; sir[1] = g[yi]; sir[2] = b[yi]; rbs = r1 - Math.abs(i); rsum += r[yi] * rbs; gsum += g[yi] * rbs; bsum += b[yi] * rbs; if (i > 0) { rinsum += sir[0]; ginsum += sir[1]; binsum += sir[2]; } else { routsum += sir[0]; goutsum += sir[1]; boutsum += sir[2]; } if (i < hm) { yp += w; } } yi = x; stackpointer = radius; for (y = 0; y < h; y++) { // Preserve alpha channel: ( 0xff000000 & pix[yi] ) pix[yi] = (0xff000000 & pix[Math.round(yi)]) | (dv[Math.round(rsum)] << 16) | (dv[ Math.round(gsum)] << 8) | dv[Math.round(bsum)]; rsum -= routsum; gsum -= goutsum; bsum -= boutsum; stackstart = stackpointer - radius + div; sir = stack[stackstart % div]; routsum -= sir[0]; goutsum -= sir[1]; boutsum -= sir[2]; if (x == 0) { vmin[y] = Math.min(y + r1, hm) * w; } p = x + vmin[y]; sir[0] = r[p]; sir[1] = g[p]; sir[2] = b[p]; rinsum += sir[0]; ginsum += sir[1]; binsum += sir[2]; rsum += rinsum; gsum += ginsum; bsum += binsum; stackpointer = (stackpointer + 1) % div; sir = stack[stackpointer]; routsum += sir[0]; goutsum += sir[1]; boutsum += sir[2]; rinsum -= sir[0]; ginsum -= sir[1]; binsum -= sir[2]; yi += w; } } let bufferNewData = new ArrayBuffer(bitmap.getPixelBytesNumber()); let dataNewArray = new Uint8Array(bufferNewData); let index = 0; for (let i = 0; i < dataNewArray.length; i += 4) { dataNewArray[i] = ColorUtils.red(pix[index]); dataNewArray[i+1] = ColorUtils.green(pix[index]); dataNewArray[i+2] = ColorUtils.blue(pix[index]); dataNewArray[i+3] = pixEntry[index].f; index++; } await bitmap.writeBufferToPixels(bufferNewData); if (func) { func("success", bitmap); }
基于OpenGL操作GPU来提升模糊性能
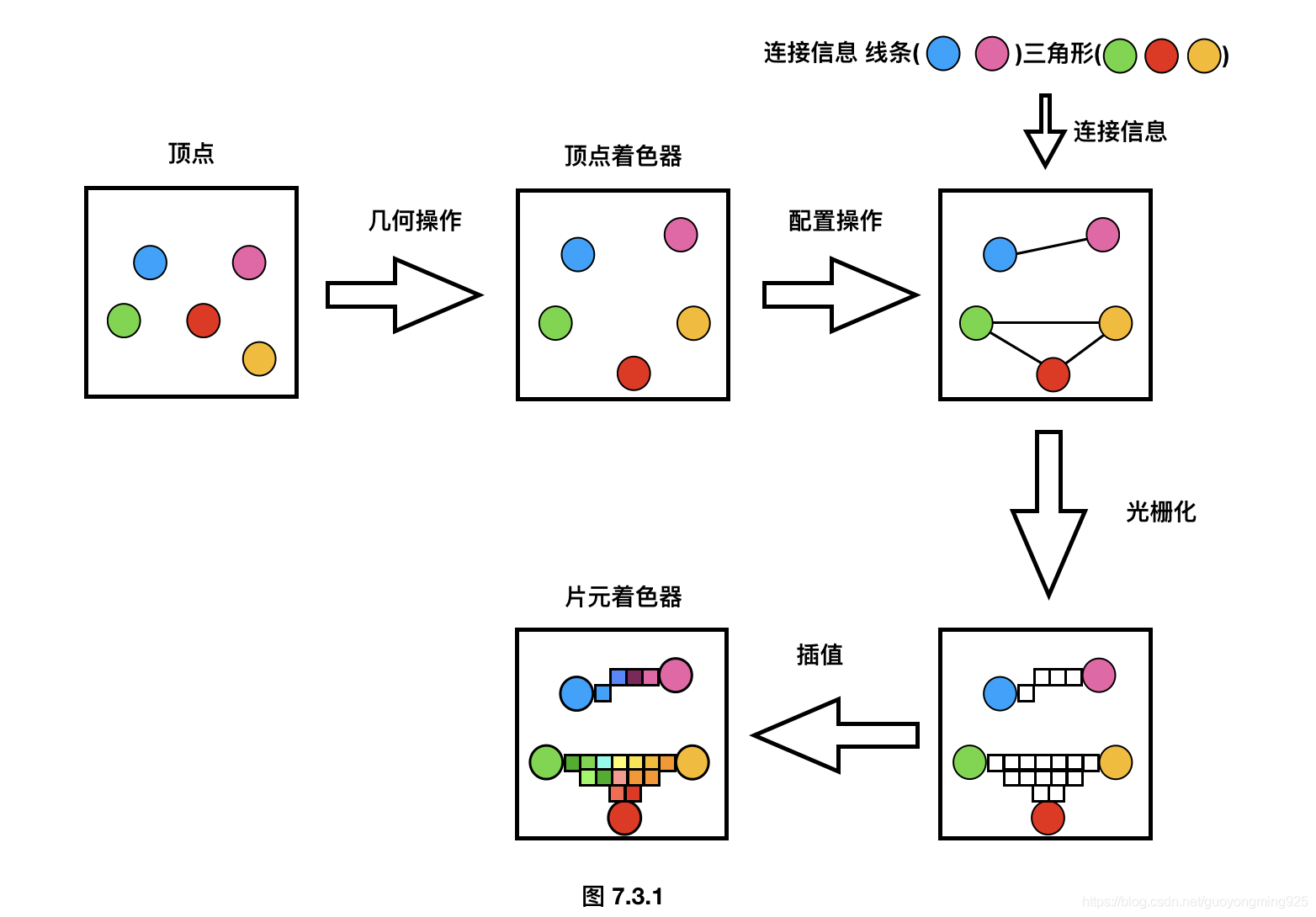
在进行基于OpenGL进行性能提升前,我们需要了解OpenGL中的顶点着色器(vertex shader)及其片元着色器(fragment shader)。着色器(shader)是运行在GPU上的最小单元,功能是将输入转换输出且各个shader之间是不能通信的,需要使用的开发语言GLSL。这里就不介绍GLSL的语言规则了。 顶点着色器(vertex shader) 确定要画图片的各个顶点(如:三角形的角的顶点),注意:每个顶点运行一次。一旦最终位置已知,OpenGL将获取可见的顶点集,并将它们组装成点、线和三角形。且以逆时针绘制的。 片元着色器(fragment shader) 生成点、线或三角形的每个片元的最终颜色,并对每个fragment运行一次。fragment是单一颜色的小矩形区域,类似于计算机屏幕上的像素,简单的说,就是将顶点着色器形成的点、线或者三角形区域,添加颜色。 片元着色器的主要目的是告诉GPU每个片元的最终颜色应该是什么。对于图元(primitive)的每个fragment,片元着色器将被调用一次,因此如果一个三角形映射到10000个片元,那么片元着色器将被调用10000次。 OpenGL简单的绘制流程: 读取顶点信息 ----------> 运行顶点着色器 ----------> 图元装配----------> 运行片元着色器----------> 往帧缓冲区写入----------> 屏幕上最终效果 简单的说,就是根据顶点着色器形成的点、线、三角形形成的区域,由片元着色器对其着色,之后就将这些数据写入帧缓冲区(Frame Buffer)的内存块中,再由屏幕显示这个缓冲区。 那模糊的效果怎么来实现呢? 首先我们来定义我们的顶点着色器及其片元着色器。如下代码: 顶点着色器:
const char vShaderStr[] =
"#version 300 es
"
"layout(location = 0) in vec4 a_position;
"
"layout(location = 1) in vec2 a_texCoord;
"
"out vec2 v_texCoord;
"
"void main()
"
"{
"
" gl_Position = a_position;
"
" v_texCoord = a_texCoord;
"
"}
";
片元着色器:
const char fShaderStr0[] =
"#version 300 es
"
"precision mediump float;
"
"in vec2 v_texCoord;
"
"layout(location = 0) out vec4 outColor;
"
"uniform sampler2D s_TextureMap;
"
"void main()
"
"{
"
" outColor = texture(s_TextureMap, v_texCoord);
"
"}";
其中version代表OpenGL的版本,layout在GLSL中是用于着色器的输入或者输出,uniform为一致变量。在着色器执行期间一致变量的值是不变的,只能在全局范围进行声明,gl_Position是OpenGL内置的变量(输出属性-变换后的顶点的位置,用于后面的固定的裁剪等操作。所有的顶点着色器都必须写这个值),texture函数是openGL采用2D纹理绘制。然后,我们还需要定义好初始的顶点坐标数据等;
//顶点坐标
const GLfloat vVertices[] = {
-1.0f, -1.0f, 0.0f, // bottom left
1.0f, -1.0f, 0.0f, // bottom right
-1.0f, 1.0f, 0.0f, // top left
1.0f, 1.0f, 0.0f, // top right
};
//正常纹理坐标
const GLfloat vTexCoors[] = {
0.0f, 1.0f, // bottom left
1.0f, 1.0f, // bottom right
0.0f, 0.0f, // top left
1.0f, 0.0f, // top right
};
//fbo 纹理坐标与正常纹理方向不同(上下镜像)
const GLfloat vFboTexCoors[] = {
0.0f, 0.0f, // bottom left
1.0f, 0.0f, // bottom right
0.0f, 1.0f, // top left
1.0f, 1.0f, // top right
};
下面就进行OpenGL的初始化操作, 获取display,用来创建EGLSurface的
m_eglDisplay = eglGetDisplay(EGL_DEFAULT_DISPLAY);初始化 EGL 方法
eglInitialize(m_eglDisplay, &eglMajVers, &eglMinVers)获取 EGLConfig 对象,确定渲染表面的配置信息
eglChooseConfig(m_eglDisplay, confAttr, &m_eglConf, 1, &numConfigs)创建渲染表面 EGLSurface,使用 eglCreatePbufferSurface 创建屏幕外渲染区域
m_eglSurface = eglCreatePbufferSurface(m_eglDisplay, m_eglConf, surfaceAttr)创建渲染上下文 EGLContext
m_eglCtx = eglCreateContext(m_eglDisplay, m_eglConf, EGL_NO_CONTEXT, ctxAttr);绑定上下文
eglMakeCurrent(m_eglDisplay, m_eglSurface, m_eglSurface, m_eglCtx)通过默认的顶点着色器与片元着色器,加载到GPU中
GLuint GLUtils::LoadShader(GLenum shaderType, const char *pSource)
{
GLuint shader = 0;
shader = glCreateShader(shaderType);
if(shader)
{
glShaderSource(shader, 1, &pSource, NULL);
glCompileShader(shader);
GLint compiled = 0;
glGetShaderiv(shader, GL_COMPILE_STATUS, &compiled);
if (!compiled){
GLint infoLen = 0;
glGetShaderiv(shader, GL_INFO_LOG_LENGTH, &infoLen);
if (infoLen)
{
char* buf = (char*) malloc((size_t)infoLen);
if (buf)
{
glGetShaderInfoLog(shader, infoLen, NULL, buf);
LOGI("gl--> GLUtils::LoadShader Could not link shader:%{public}s", buf);
free(buf);
}
glDeleteShader(shader);
shader = 0;
}
}
}
return shader;
}
创建一个空的着色器程序对象
program = glCreateProgram();将着色器对象附加到program对象
glAttachShader(program, vertexShaderHandle); glAttachShader(program, fragShaderHandle);连接一个program对象
glLinkProgram(program);创建并初始化缓冲区对象的数据存储
glGenBuffers(3, m_VboIds);
glBindBuffer(GL_ARRAY_BUFFER, m_VboIds[0]);
glBufferData(GL_ARRAY_BUFFER, sizeof(vVertices), vVertices, GL_STATIC_DRAW);
glBindBuffer(GL_ARRAY_BUFFER, m_VboIds[1]);
glBufferData(GL_ARRAY_BUFFER, sizeof(vFboTexCoors), vTexCoors, GL_STATIC_DRAW);
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, m_VboIds[2]);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, sizeof(indices), indices, GL_STATIC_DRAW);
glGenVertexArrays(1, m_VaoIds);
glBindVertexArray(m_VaoIds[0]);
到这,整个OpenGL的初始化操作,差不多完成了,接下来,我们就要去基于OpenGL去实现我们想要的模糊效果。 考虑到模糊的效果,那么我们需要给开发者提供模糊半径blurRadius、模糊偏移量blurOffset、模糊的权重sumWeight。所以我们需要在我们模糊的片元着色器上,定义开发者输入,其模糊的片元着色器代码如下:
const char blurShaderStr[] =
"#version 300 es
"
"precision highp float;
"
"uniform lowp sampler2D s_TextureMap;
"
"in vec2 v_texCoord;
"
"layout(location = 0) out vec4 outColor;
"
"uniform highp int blurRadius;
"
"uniform highp vec2 blurOffset;
"
"
"
"uniform highp float sumWeight;
"
"float PI = 3.1415926;
"
"float getWeight(int i)
"
"{
"
"float sigma = float(blurRadius) / 3.0;
"
"return (1.0 / sqrt(2.0 * PI * sigma * sigma)) * exp(-float(i * i) / (2.0 * sigma * sigma)) / sumWeight;
"
"}
"
"vec2 clampCoordinate(vec2 coordinate)
"
"{
"
" return vec2(clamp(coordinate.x, 0.0, 1.0), clamp(coordinate.y, 0.0, 1.0));
"
"}
"
"
"
"void main()
"
"{
"
"vec4 sourceColor = texture(s_TextureMap, v_texCoord);
"
"if (blurRadius <= 1)
"
"{
"
"outColor = sourceColor;
"
"return;
"
"}
"
"float weight = getWeight(0);
"
"vec3 finalColor = sourceColor.rgb * weight;
"
"for (int i = 1; i < blurRadius; i++)
"
"{
"
"weight = getWeight(i);
"
"finalColor += texture(s_TextureMap, clampCoordinate(v_texCoord - blurOffset * float(i))).rgb * weight;
"
"finalColor += texture(s_TextureMap, clampCoordinate(v_texCoord + blurOffset * float(i))).rgb * weight;
"
"}
"
"outColor = vec4(finalColor, sourceColor.a);
"
"}
";
里面的逻辑暂时就不介绍了,有兴趣的朋友可以去研究研究。 通过上述的LoadShader函数将其片元着色器加载到GPU的运行单元中去。
m_ProgramObj = GLUtils::CreateProgram(vShaderStr, blurShaderStr, m_VertexShader,
m_FragmentShader);
if (!m_ProgramObj)
{
GLUtils::CheckGLError("Create Program");
LOGI("gl--> EGLRender::SetIntParams Could not create program.");
return;
}
m_SamplerLoc = glGetUniformLocation(m_ProgramObj, "s_TextureMap");
m_TexSizeLoc = glGetUniformLocation(m_ProgramObj, "u_texSize");
然后我们就需要将图片的整个像素数据传入; 定义好ts层的方法:
setImageData(buf: ArrayBuffer, width: number, height: number) { if (!buf) { throw new Error("this pixelMap data is empty"); } if (width <= 0 || height <= 0) { throw new Error("this pixelMap of width and height is invalidation"); } this.width = width; this.height = height; this.ifNeedInit(); this.onReadySize(); this.setSurfaceFilterType(); this.render.native_EglRenderSetImageData(buf, width, height); };将ArrayBuffer数据传入NAPI层。通过napi_get_arraybuffer_info NAPI获取ArrayBuffer数据。
napi_value EGLRender::RenderSetData(napi_env env, napi_callback_info info) {
....
void* buffer;
size_t bufferLength;
napi_status buffStatus= napi_get_arraybuffer_info(env,args[0],&buffer,&bufferLength);
if (buffStatus != napi_ok) {
return nullptr;
}
....
EGLRender::GetInstance()->SetImageData(uint8_buf, width, height);
return nullptr;
}
将其数据绑定到OpenGL中的纹理中去
void EGLRender::SetImageData(uint8_t *pData, int width, int height){
if (pData && m_IsGLContextReady)
{
...
m_RenderImage.width = width;
m_RenderImage.height = height;
m_RenderImage.format = IMAGE_FORMAT_RGBA;
NativeImageUtil::AllocNativeImage(&m_RenderImage);
memcpy(m_RenderImage.ppPlane[0], pData, width*height*4);
glBindTexture(GL_TEXTURE_2D, m_ImageTextureId);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, m_RenderImage.width, m_RenderImage.height, 0, GL_RGBA, GL_UNSIGNED_BYTE, m_RenderImage.ppPlane[0]);
glBindTexture(GL_TEXTURE_2D, GL_NONE);
....
}
}
然后就是让开发者自己定义模糊半径及其模糊偏移量,通过OpenGL提供的
glUniform1i(location,(int)value); 设置int 片元着色器blurRadius变量 glUniform2f(location,value[0],value[1]); 设置float数组 片元着色器blurOffset变量将半径及其偏移量设置到模糊的片元着色器上。 之后,通过GPU将其渲染
napi_value EGLRender::Rendering(napi_env env, napi_callback_info info){
// 渲染
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, (const void *)0);
glBindVertexArray(GL_NONE);
glBindTexture(GL_TEXTURE_2D, GL_NONE);
return nullptr;
}
最后,就剩下获取图片像素的ArrayBuffer数据了,通过glReadPixels读取到指定区域内的像素点了
glReadPixels(x,y,surfaceWidth,surfaceHeight,GL_RGBA,GL_UNSIGNED_BYTE,pixels);但是,在这里,因为OpenGL里面的坐标系,在2D的思维空间上,与我们通常认知的是倒立的,所以需要对像素点进行处理,得到我们想要的像素点集
int totalLength= width * height * 4; int oneLineLength = width * 4; uint8_t* tmp = (uint8_t*)malloc(totalLength); memcpy(tmp, *buf, totalLength); memset(*buf,0,sizeof(uint8_t)*totalLength); for(int i = 0 ; i< height;i ++){ memcpy(*buf+oneLineLength*i, tmp+totalLength-oneLineLength*(i+1), oneLineLength); } free(tmp);最后在上层,通过系统提供的createPixelMap得到我们想要的图片,也就是模糊的图片。
getPixelMap(x: number, y: number, width: number, height: number): Promise综上,本篇文章介绍了由单纯的在JS中用正态分布公式操作像素点实现模糊效果,引出性能问题,最后到基于OpenGL实现模糊效果的优化,最后性能上也从模糊一张大图片要十几秒提升到100ms内。{ ..... let that = this; return new Promise((resolve, rejects) => { that.onDraw(); let buf = this.render.native_EglBitmapFromGLSurface(x, y, width, height); if (!buf) { rejects(new Error("get pixelMap fail")) } else { let initOptions = { size: { width: width, height: height }, editable: true, } image.createPixelMap(buf, initOptions).then(p => { resolve(p); }).catch((e) => { rejects(e) }) } }) }
编辑:黄飞











 工商网监
工商网监
评论