 电子发烧友App
电子发烧友App


这次实验没有涉及到外部中断,都是做普通的IO输入使用的,所以在这里外部中断就做学习总结了。下面给出这次实验的主程序:
/*********************************************************************************
文件名称:mian.c
功 能: 主要调度函数及应用函数
编译环境: MDKV4.12
时 钟: 外部12Mhz
日 期: 11/08/16
作 者: 懒猫爱飞
备 注:NULL
---------------------------------------------------------------------------------
修改内容:NULL
修改日期:XXXX年xx月xx日 xx时xx分
修改人员:xxx xxx xxx
**********************************************************************************/
#include“main.h”
volatile unsigned lONg SysTickCnt; /* 用于系统时钟计数*/
/********************************************************************************
* 函数名称:void SysTick_Handler (void)
* 函数功能: 系统节拍定时器中断函数,每1ms计数一次
* 入口参数: 无
* 出口参数: 无
* 备 注:无
*******************************************************************************/
void SysTick_Handler (void)
{
SysTickCnt++;
}
/********************************************************************************
* 函数名称:void Delay (unsigned long tick)
* 函数功能: 毫秒级延时函数
* 入口参数: unsigned long tick -- 延时时长
* 出口参数: 无
* 备 注:无
*******************************************************************************/
void DelayMs (unsigned long tick)
{
unsigned long systickcnt;
systickcnt = SysTickCnt;
while ((SysTickCnt - systickcnt) 《 tick);
}
/********************************************************************************
* 函数名称:void PortInit(void)
* 函数功能: 端口初始化
* 入口参数: 无
* 出口参数: 无
* 备 注:无
*******************************************************************************/
void PortInit(void)
{
GPIO1-》FIODIR = 0xB0000000; /* LEDs on PORT1 defined as Output */
GPIO2-》FIODIR = 0x0000007C; /* LEDs on PORT2 defined as Output */
LedAllOff(); /* 初始化时熄灭所有的灯*/
}
/********************************************************************************
* 函数名称:int main(void)
* 函数功能: 主函数
* 入口参数: 无
* 出口参数: 无
* 备 注:无
*******************************************************************************/
int main(void)
{
unsigned char LedFlag = 1; // 记录LED状态
SystemInit(); /* 系统初始化,函数在system_LPC17xx.c文件夹中定义*/
SysTick_Config(SystemFrequency/1000 - 1); /* 配置时钟中断,每1ms中断一次*/
/* 在core_cm3.h中定义*/
PortInit(); /* 端口初始化*/
while(1)
{
if(!LedFlag)
{
Led1On(); // 点亮LED
}
else
{
Led1Off(); // 熄灭LED
}
if(!KEY_VAL)
{
DelayMs(10);
while(!KEY_VAL);
LedFlag ^=1; // Led状态改变一次
}
if(!KEY_EN) // 此处是为了测试摇杆按键的功能是否正常
{
DelayMs(10);
while(!KEY_EN);
Led8Neg(); // 点亮LED // Led状态改变一次
}
}
}
上一节对程序没有做过多的解释,这里详细分析一下,工程中包含的源文件如下图所示:
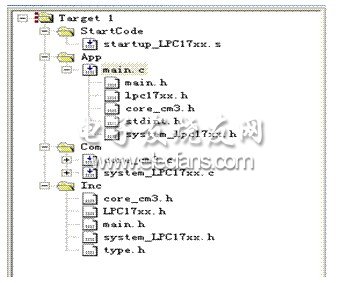
工程中startup_LPC17XX.s是M3的启动文件,启动文件由汇编语言写的,它的作用一般是下面这几个:
1)堆和栈的初始化
2)向量表定义
3)地址重映射及中断向量表的转移
4)设置系统时钟频率
5)中断寄存器的初始化
6)进入C应用程序
工程中main.c是我写的应用程序,也就是这次实验的程序,core_cm3.c与core_cm3.h主要是M3外围驱动源代码与头文件,使用时一般不需要修改,直接调用就可以。system_LPC17xx.c与system_LPC17xx.h是关于系统的文件,里面主要提供了系统初始化函数SystemInit(),文件中默认情况下定义的晶振的大小为12M,使用的是外部晶振,还使用了PLL0倍频,关于倍频的问题,以后慢慢再总结。芯片LPC1768的初始化主要包括时钟配置,电源管理,功耗管理等。相比较而言,时钟配置相对复杂,因为它包括两个PLL倍频电路,一个是主PLL0主要是为系统和USB提供时钟,另一个是PLL1专门为USB提供48M时钟,但也可以不使用它们。由于时钟配置比较灵活,所以相以设置这些参数也比较复杂,但是这些在系统文件中已有明确的定义,所以想要变动时只需修改系统文件中相应的宏或函数即可。
下面简要总结一下main()函数,首先是系统初始化函数SystemInit(),上面说过它在system_LPC17xx.c这个源文件中,这个函数主要完成了对时钟的配置,系统功耗PCONP,时钟输出,flash加速等系统资源配置。如果要进行修改可以参考源文件的修改方法,虽然是英文注释,但都非常简单,有兴趣的可以打开看看,不过一般情况下我们拿来直接用就好了不用修改的。
函数SysTick_Config(SystemFrequency/1000 - 1) 是用来配置系统时钟节拍的,它的原型在core_m3.c这个源文件中。实验程序中用的延时函数都是硬件延时,其实就是系统节拍定时器所产生的。使用硬件延时的原因是1、不占用软件系统资源,2、比较精确。系统定时器配置很简单,使用也很方便,专为系统软件或系统管理软件提供间隔中断。系统节拍定时器的时钟源可以是内核时钟也,可以是外部时钟,外部时钟P3.26脚引入,当然想从这个引脚输入时钟,需要将这个引脚先配置成STCLK功能。系统节拍定时器是一个24位定时器,当计数值达到0时产生中断。系统节拍定时器的功能就是为下一次中断提供前提供一个固定时间间隔。由于节拍定时器是24位的,所以使用时不能与其它定时器混为一谈,一定要注意定时时长的限制,不能超过界限。
最后再说一下数据类型的问题,在8位机中数据位找一般就是8位的所以,定义变量时一般选用单字节处理速度会快些,但到了32位机中,数据位宽一般是32位的,所以定义变量时一般用4字节会好些。在core_cm3.c中有关于数据类型的定义,有兴趣的可以打开看看。
无论是哪款单片机应该都有对应的中断的功能,中断在嵌入式系统的地位毋庸置疑。LPC1768微处理器包括4个外部中断,分别是EINT0、EINT1、EINT2、EINT3对应的引脚分别是P2.10~P2.13,这几个引脚也可以作为通用IO口使用。名个外部中断可以设置成低电平/高电平或上升沿/下降沿有效,它们还有一个功能就是可用于将处理器从睡眠、深度睡眠或掉电模式中唤醒。涉及到外部中断的寄存器主要有以下几个:
寄存器名称描述功能默认值
EXTINT外部中断标志寄存器设置或查看中断标志0x00
EXTMODE外部中断模式寄存器设置电平触发或边沿触发0x00
EXTPOLAR外部中断极性寄存器设置为高/低电平或上升/下降沿触发0x00
PINSEL4引脚功能选择寄存器选择P2引脚的功能0x00
因为实验选用中断方式而非查询方式来测试中断,因中P2.10口接有一个按键,所以就用这个按键来作个简单的中断实验,由于是选用的是下降沿触发,所以还涉及一个寄存器:IO2IntenF这个寄存器的功能是使能P2口的下降沿中断功能。因为只是实验,所以电路很简单,还是使用的前两次用的电路图,如下所示:
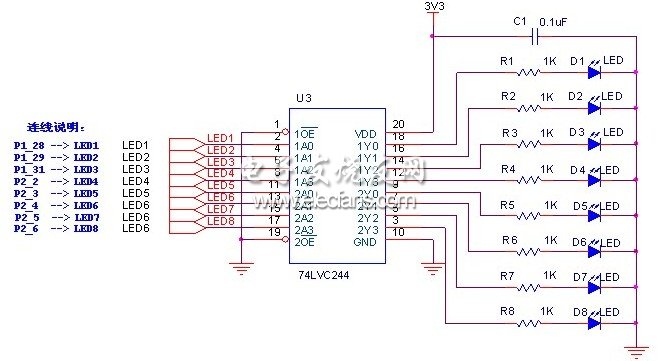
图1 LED指示电路
还有一个电路,其实就是在P2.10口上接了一个轻工触按键,以触发外部中断,这里就不上图了。好了,由于实验内容简单,下面给出中断程序,关于主程序有兴趣的话可以参看附件中的,里面有完整的Real MDK4.10建立的工程工件:
/*********************************************************************************
文件名称:extint.c
功 能: LPC1768的外部中断函数
编译环境: MDKV4.12
时 钟: 外部12Mhz
日 期: 11/08/18
作 者: 懒猫爱飞
备 注:NULL
---------------------------------------------------------------------------------
修改内容:NULL
修改日期:XXXX年xx月xx日 xx时xx分
修改人员:xxx xxx xxx
**********************************************************************************/
#include “includes.h”
volatile uint32_t eint0_counter = 8; // 初始化时第一个灯亮
/********************************************************************************
* 函数名称:void EINT0_IRQHandler (void)
* 函数功能: 外部中断0函数入口
* 入口参数: 无
* 出口参数: 无
* 备 注:无
*******************************************************************************/
void EINT0_IRQHandler (void)
{
SC -》 EXTINT = EINT0; /* 清中断*/
switch(eint0_counter%8)
{
case 0: Led1Neg(); /* LED1状态取反*/
break;
case 1: Led2Neg(); /* LED2状态取反*/
break;
case 2: Led3Neg(); /* LED3状态取反*/
break;
case 3: Led4Neg(); /* LED4状态取反*/
break;
case 4: Led5Neg(); /* LED5状态取反*/
break;
case 5: Led6Neg(); /* LED6状态取反*/
break;
case 6: Led7Neg(); /* LED7状态取反*/
break;
case 7: Led8Neg(); /* LED8状态取反*/
break;
default:break;
}
eint0_counter++; /* 计数值加1 */
}
/********************************************************************************
* 函数名称:uint32_t EINTInit( void )
* 函数功能: 外部中断0初始化函数
* 入口参数: 无
* 出口参数: 返回TURE或FALSE
* 备 注:如果是返回false则说明中断入口函数没有在中断向量表中建立
*******************************************************************************/
uint32_t EINTInit( void )
{
PINCON -》 PINSEL4 = 0x00100000; /* 将P2.10脚设置为EINT0即第二功能*/
GPIOINT -》 IO2IntEnF = 0x200; /* 设置为下降沿触发*/
SC -》 EXTMODE = EINT0_EDGE; /* 外部中断模式选择为边沿触发*/
SC -》 EXTPOLAR = 0; /* 外部中断1极性设置,此处选默认的低电平或下降沿*/
NVIC_EnableIRQ(EINT0_IRQn); /* 使能外部中断0 */
return( TRUE );
}
这个程序只有两个函数,一个是中断处理函数,没有什么不好理解,在这里不总结,关于中断初始化函数,前面都是设置相关的中断寄存器的,关于寄存器是怎么设置的可以看一下LPC1768的手册,上面都有详细的说明,在这里不再码字总结。关于void NVIC_EnableIRQ(IRQn_Type IRQn)这个函数,它在core_cm3.h中有定义,其实就是设置中断使能寄存器ISER,从名字就可以看出来了,它的功能就是使能中断。这次外部中断没有用查询的方式,查询方式的原理就是设置好中断,使能中断,然后主程序一直查询中断位是否有中断,然后再执行相应的措施。











 工商网监
工商网监
评论