 电子发烧友App
电子发烧友App


阿波罗制导计算机(AGC)是一个数字电脑制作的阿波罗计划,命令模块(CM)和登月舱(LM)的安装,船上每个阿波罗。飞船的制导,导航和控制的AGC提供的计算和电子接口。AGC的字长16位,15个数据位和1个校验位。对AGC软件大部分被储存在一个特殊的只读存储器称为核心绳内存,塑造编织通过电线磁芯,尽管提供了少量核心内存的读写。
宇航员沟通与AGC 的AGC和DSKY的用户界面使用一个数字显示屏和键盘称为DSKY。在阿波罗计划的20世纪60年代初由MIT仪器实验室开发的。AGC是第一个显着集成电路的计算机。
阿波罗导航计算机设计
AGC的设计MIT仪器实验室的查尔斯·斯塔克德雷珀下,所导致的硬件设计埃尔登C·霍尔。早期的建筑工作从JH Laning小,来到阿尔伯特·霍普金斯,拉蒙·阿隆索,休·布莱尔-史密斯。飞行硬件是由雷神公司制造。
阿波罗飞行计算机是第一次使用集成电路(IC)电路。而我的座版本采用4100芯片,每个包含一个单一的3输入NOR门,后第二座版本(用于载人飞行)用两个3输入NOR门2800集成电路,每个:34 “ 使用电阻晶体管逻辑电路(RTL)的扁平封装集成电路,飞兆半导体,实施。他们通过卷线连接,布线,然后在铸造嵌入式环氧塑料。避免使用单一类型的IC整个AGC(双??NOR3)的问题,困扰着另一个早期的集成电路计算机设计,民兵II 制导计算机,它使用的混合二极管晶体管逻辑电路和二极管的逻辑门。
计算机磁芯存储器只读芯绳内存和36 kilowords的 2048字擦除。两者有11.72微秒的周期时间。存储器字的长度为16位:15位数据和1奇校验位。在CPU内部的16位字的格式是14位数据,1 溢出位,1个符号位。
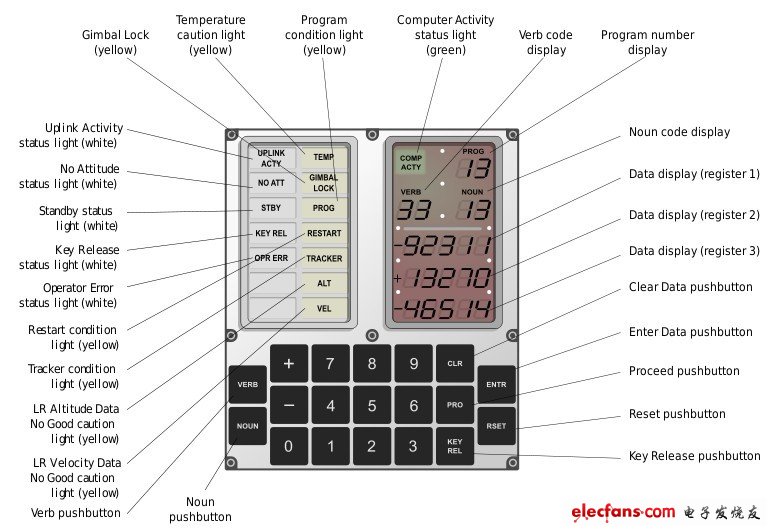
阿波罗导航计算机显示屏和键盘(DSKY)接口命令模块的控制面板,安装在飞行主任姿态指示器(FDAI)以上。
DSKY接口
阿波罗的计算机DSKY用户接口单元。
LM DSKY接口示意图。用户界面的AGC是DSKY,站在显示屏和键盘,通常突出显示关键。它有一个指示灯,数字显示器和计算器式的键盘阵列。命令输入数值,作为两个数字:动词,名词,动词描述要执行的动作类型和名词指定的数据是由动词命令指定的动作影响。
通过绿色高电压电致发光 七段显示器显示的数字。段驱动机电式继电器,这限制了显示更新率(第二座采用速度更快的硅控整流器)。三个5位有符号数,也可以显示在八进制或十进制,通常用于显示飞船的态度或所需的速度变化(Δ-V ) ,如 载体。虽然数据存储在内部公制单位,他们显示美国习惯单位。此计算器界面风格的先河,为所有类似的数字控制面板接口的原型。
指令舱有两个DSKYs连接到其自动增益控制;位于主仪表板,并在附近的一个较低的设备湾位于第二六分仪对准采用惯 ??性制导平台。登月舱有其自动增益控制的单DSKY。一个飞行主任态度指标(FDAI),由AGC控制,位于DSKY以上指挥员的控制台上的LM。
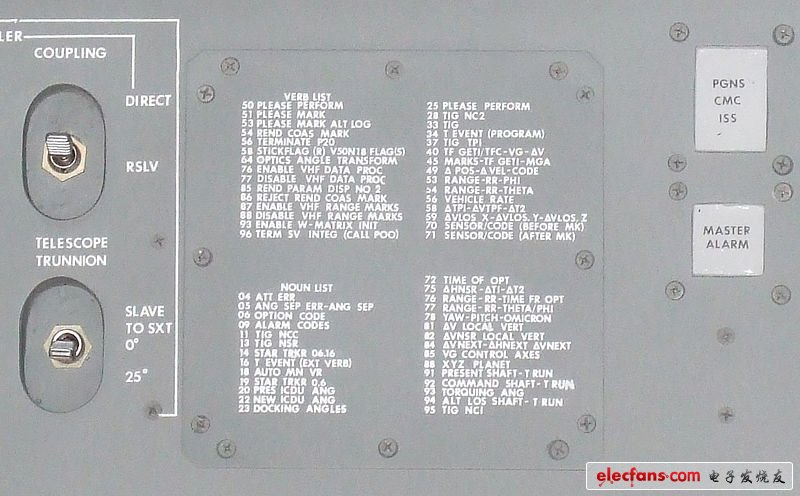
阿波罗导航计算机中的动词和名词的数字代码的部分清单。一个快速参考,他们印制了一个侧面面板上。
定时
AGC时序参考了从2.048 MHz的晶振 时钟。时钟被一分为二,产生一个四阶段的1.024 MHz时钟的AGC用来进行内部操作。1.024 MHz的时钟也被分为两个生产称为主频率512 kHz信号,这个信号被用于同步外部阿波罗飞船系统。
主频率进一步分为通过缩放,首先使用一个由五个环网柜,产生102.4 kHz的信号。这是再除以2到17的连续阶段,通过17层(0.78125赫兹)F1(51.2千赫)。被送入了AGC的F10级(100赫兹)回递增的实时时钟和其他不由自主的计数器使用PINC。17层阶段,用于间歇运行,当它在待机模式下的AGC 。
LM DSKY接口示意图。
DSKY和AGC。AGC打开,显示其逻辑模块。

原型逻辑块I AGC模块。
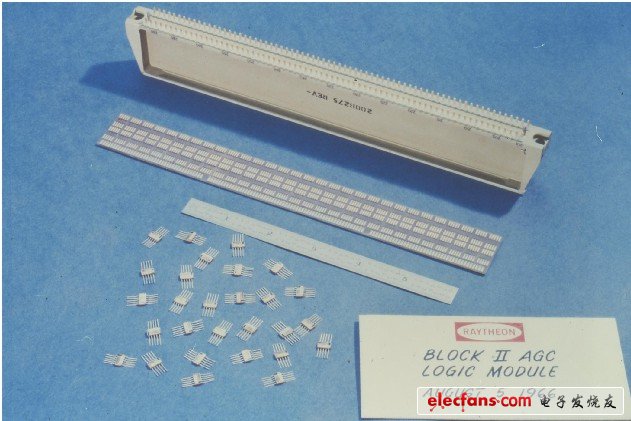
Block II的逻辑模块,平面包集成电路。
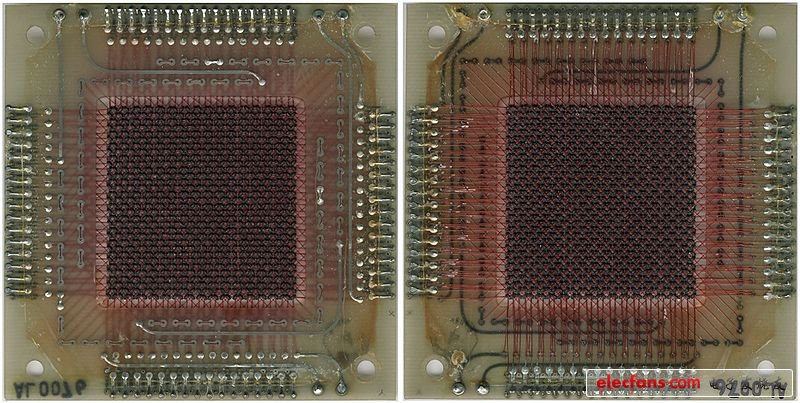
阿波罗AGC的可擦写1024位核心内存模块(正面和背面)
阿波罗登月舱制导控制研发故事
阿波罗11号登月任务成功,尽管两个电脑相关的问题影响了登月舱供电。雷达接口问题偷计算机的占空比约13%,在五个计划警报和软件重新启动。在一个不太知名的问题,错误数据造成的,LM的血统发动机的推力巨幅波动,因为油门控制算法只能勉强稳定。为解释这些问题,故提供了一个阿波罗飞行计算机和的登月指导软件操作系统。
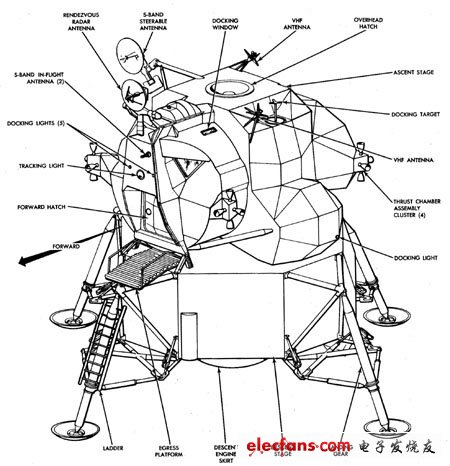
图1:登月舱
LM-1,又称阿波罗5,6小时无人任务在地球轨道上的登月舱(LM)的。日期为1968年1月22日,。对于我们这些LM制导计算机(LGC公司)开发的机载软件,这是我们第一次飞行。现在在我们曾经似乎不可能遥远的事件。
任务包括两个LM的推进系统(DPS),射击。它有三个部分,旨在模拟的“刹车”阶段,轨道下降的阶段,一个真正最后的着陆阶段。但首先是为了模拟机动,着陆之前的下降轨道插入烧伤。这是LM的血统的发动机在飞行中发射的第一个,持续时间约38秒。
我们听到的“引擎”。几秒钟过去了。“停机”。
笔者的调查表明,这个问题是在别处。对于DPS的燃油系统,正常的程序是打开阀门,允许进入当时多方面的推进剂燃料发动机点火前武装,几秒钟的时间。但是从油管进入发动机的燃料通过控制阀,调节的LM-1被怀疑是漏水。自燃推进剂发动机(这可能有爆炸性的后果)。
非正式的,该方案被称为“绳索”,因为只读存储器的耐用的形式把它们转化为飞行,它类似于一个铜丝编织绳。为登月任务,“固定”(只读)内存36K字,每个字15位加一个奇偶校验位组成,可用于程序。此外,有2K字的巧妙分时“擦除”或RAM内存。允许相同的阿波罗制导计算机(AGC),在命令模块(CM)中的程序被称为巨像,它是正确的说,我们降落在月球上152字节的计算机内存。
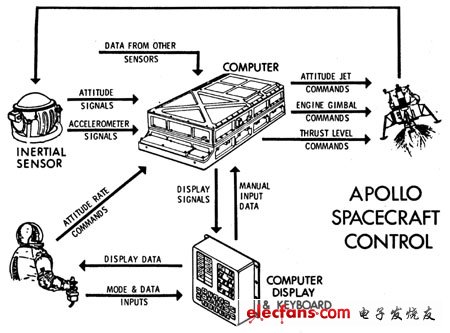
图2:阿波罗LM制导和导航系统(PGNS)
AGC的包装在一个坚固,密封,铝,镁框,在金色的阳极,测量大约六英寸,一只脚由两英尺,重达70磅,消耗大约55瓦。其逻辑是扁平封装集成电路封装在两个各5600 3输入NOR门。机舱的主要设计师大胆的决定,为这台计算机中使用集成电路技术,尽管它在60年代初期技术并不成熟。
对准望远镜和惯性测量单元(IMU),在一个固定的几何关系。图2说明了LM的主引导系统组件和高层次的接口。
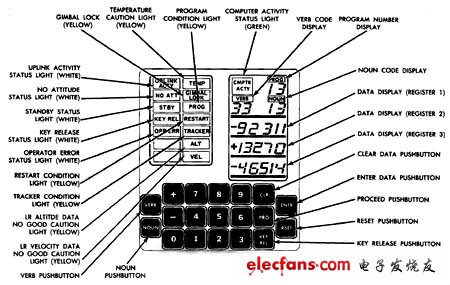
图3:的登月舱显示和键盘组(DSKY)
DSKY(图3)是LGC公司为主体的人机界面。它的显示提供了三个5位数的寄存器。
图4:LM计算机程序
现在的电脑发出代码500。它认为,着陆雷达天线是在错误的位置。船员们看到了相关的开关已经在正确的位置,但不管怎样,他们骑自行车,他们警告清零。这些信号告诉电脑其实有些像一个开关或一个天线的位置,但有时这数据并不可靠。
被称为P63的制动阶段,因为它的唯一目的是流水平的速度。当飞船到达一定高度的目标条件下,在约7400英尺的高度,在约八分钟后将结束制动。图5展示了登月的各个不同阶段。

图5:登月阶段
在当时,这不可能如此精确地进行导航,要想安全降落在月球表面上必须得有月球的相对距离或速度。着陆雷达提供的信息。
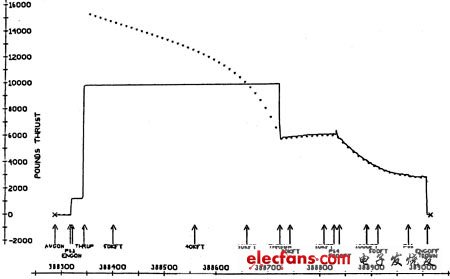
图6:实验推力(虚线)与实际推力
(实线),在动力下降后的数据(模拟数据)
经历下降发动机喷嘴的过度侵蚀,如果在65%之间,最大推力范围起到作用。踩下喷射燃料的制导系统做如何的敏感指标。如果在最大油门卡住中止可能很快是必要的,因为在大约40秒的指导方程指挥飞船反转的。
重新启动保护工作由登记在合适的位置,在操作软件等,如果处理发生跳回到过去的航点,没有错误将在下面的例子介绍,航点:
NEW_X = X +1
寄存器航点
X = NEW_X
这是显而易见的,没有航点,第二次通过这个代码将导致X将增加两倍。
重新启动之后,这样的计算可以重建。对于每个作业,处理开始于去年注册的航点。如果同样的工作队列中的多个副本,只是最近被重新启动。并不被视为重要的某些其他计算,不重新启动保护。这些将完全消失,如果有重新启动。
重新启动保护工作非常出色。在控制面板实时在剑桥的“混合”模拟器是一个按钮,造成AGC的重新启动。我们有时在模拟按下按钮,随机几乎希望失败,可能导致我们更多的错误。总是,一旦我们得到了重新启动的保护工作,继续运作的无缝连接。
(一个真正的AGC和现实LM和医药驾驶舱SDS 9300数字和贝克曼模拟计算机结合的混合模拟器。)
已提出很多解释为什么这样的RR配置登月。例如,监测RR数据,通过比较预期的读数图表登陆幻想的计划可能被认为有些人在休斯敦。然而,一个简单的解释是不足以解释的事实:RR为无其他目的比回暖,如果有中止,它是在AUTO(LM在一个位置跟踪的CM)或(其他时间)在压摆,只要保持移动无益天线。
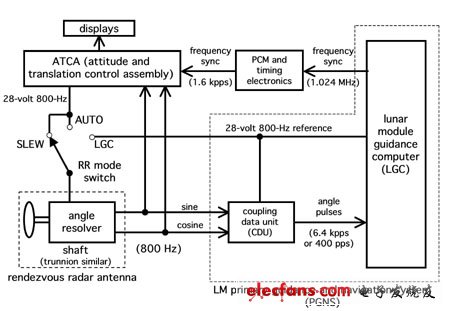
图7:,其中PGNS,ATCA和交会雷达的接口
问题也被归因(包括笔者以前)“清单错误”。这个提法是不超过准确地调用发动机过早关闭的delta-V的显示器LM-1“电脑错误”,它实际上是造成错误的文件。
登月的阿波罗任务最繁忙的阶段。着陆指导——以击中目标位置定义,速度,加速度(这样的LM会留右侧),加速度的变化率的一个方面。在能见度阶段的软件许可船员重新划定的降落地点。对发射器不断加以控制。导航纳入着陆雷达测量。(图8显示了典型的占空比配置之间选择P63和着陆)。

图8:占空比供电(模拟数据)期间
占空比在月球下降,简单地介绍了多少时间用在汇总工作,任务和中断期间每2秒的时间内显示一次。
在制动阶段,在表面上着陆雷达锁定时间,占空比要达到15%以上。

表1:登月活动任务表
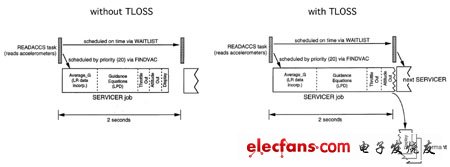
图9:维修人员操作,并没有TLOSS
图9展示了如何在存在严重TLOSS的服务机构的行为,与图10比较了一套核心和VAC面积使用,正常情况下,高TLOSS在重新启动的情况下发生的情节。
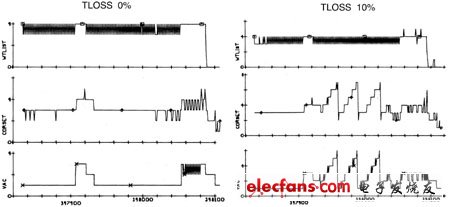
图10:候补资源采集
(模拟数据,开始在P63的前雷达速度数据的采集,在触地结束需要注意的是图有不同的垂直尺度对TLOSS影响。)
在IMU的加速度没有真正测量加速度;他们只是计算自上次阅读的速度递增。因为以前的指导通指挥油门变化发生在加速度计读数之间的一段时间,测量三角洲 - V没有显示最近期的调整效果。

图12:图为阿波罗12号为P66 燃料库控制一览
图13:参与阿波罗制导系统研发的主要工程师专家,:前排戴维·摩尔,托尼·库克。后排:菲尔Felleman,拉里·伯曼,艾伦Klumpp,鲍勃·沃纳,罗伯特喹诺酮类,萨姆·德雷克。













 工商网监
工商网监
评论