 电子发烧友App
电子发烧友App


控制系统选用两轮独立驱动小车为移动式机器人平台,后轮为一个尼龙万向轮。处理器为三星公司的S3C2440,系统主频最高可达533 MHz,外接512 MB的NAND Flash和64 MB的SDRAM,支持SPI、I2C、UART等接口,满足移动机器人控制系统的需求,如图1所示。

图1 系统硬件组成
整个控制系统工作过程如下:语音识别芯片LD3320通过SPI总线接口接人ARM 处理器,处理器可以对识别的结果进行分析和汇总,并通过查表提取出操作人员的命令码;同时,处理器通过串口读取机器人当前的航向信息;超声波测距和红外线地面检测模块由处理器的GPIO 引脚控制;通过控制两自由度的云台,可以进行多方位的超声波障碍物检测,利用LD3320模块的MP3播放功能播放所检测到的障碍物距离和路况信息。控制系统根据传感器的数据和所识别的操作人员的命令码,利用信息融合技术提取环境特征,通过路径规划技术作出决策,控制电机状态,最终控制机器人的姿态。
2 控制系统软件设计
在软件设计中,将系统中所有要处理的任务划分为不同的、相互独立的任务模块。根据系统的性能指标和技术要求,可将任务划分为:语音识别、航向测量与计算、超声波测距、电机控制、信息处理等任务。
2.1 进程的创建与状态转换
移动机器人控制系统在初始化完成后,利用系统调用fock机制分别为语音识别、航向测量与计算和超声波测距等任务产生相应的子进程,实现方式如图2所示。进程创建成功后,操作系统会根据调度算法进行进程调度,这使系统在行驶过程中,能够及时响应语音命令。

图2 系统多进程设计的实现方式
2.2 进程间通信机制
在信息处理进程中,需要对不同任务返回的有效数据进行信息处理和融合。由于不同进程的数据段、堆栈段是相互隔离的,因此,采用共享内存的进程间通信方式,在程序中可以使用shmget从系统中取出一块未使用的物理内存并映射到用户空间,如图3所示。

图3 共享内存机制示意图
在两个进程之间建立共享内存的具体实现步骤如下:
① 在调用fock()前,使用shmget创建新的共享内存,返回值为共享内存标识码:
shmid = shmget(IPC_PRIVATE,1,PERM)
//申请一个字节共享内存
② 调用fock()函数,创建子进程,根据fock()的返回值区分父进程和子进程,并分别在两个进程中使用shmat映射一块共享内存,即允许当前进程访问创建的共享内存:
if(fock()) p_addr= shmat(shmid,0,0);
//将共享内存映射到父进程
else{c_addr=shmat(shmid,0,0);}//将共享内存映射到子进程
其中,shmid为shmget()函数的返回值,即共享内存标识码。
从用户的角度看,在父进程中可以对p_addr进行读写操作,实际访问的是申请的共享内存。子进程则可以对c_addr进行读写,从而实现两个进程间的通信。共享内存的映射和进程之间的关系,如图4所示。

图4 进程和共享内存映射关系
2.3 系统控制流程
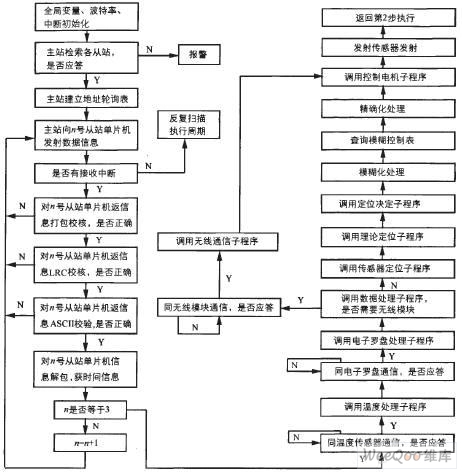
在程序初始化完成后,为每项任务创建了相应的进程,并建立了共享内存,如图5所示。在每个进程中采用循环执行方式,语音识别进程中利用select函数监控是否有识别结果输出,并将识别结果写入到相应的共享内存区。

图5 系统控制流程图
航向测量和计算进程循环读取陀螺仪的角度信息并存储。超声波测距进程在接收到信息处理进程的控制命令后进行测距并将数据返回至信息处理进程。信息处理进程融合了多传感器的数据,根据设定的路径规划方案,将控制信息传输到电机控制进程,实现机器人姿态的调整。
2.4 语音识别
在系统运行过程中,语音识别进程独立完成对语音模块的初始化和读取识别结果的任务,因此,能够及时响应操作人员发出的语音指令。程序中使用了select()函数监控read()是否可读。当语音识别模块LD3320有识别结果时,将在中断引脚输出高电平以触发系统中断,结束驱动程序中的等待状态,同时应用程序可以通过read()函数读取LD332O的识别结果,并写入到相应共享内存区M中。在没有中断时,read()函数将被阻塞,如图6所示。
图6 语音识别进程流程图
使用select机制监控是否语音识别结果,在超出等待时间后,会退出等待并重新初始化语音模块LD3320,释放公共资源,这样也使得系统能够及时响应LD332O的MP3播放功能,避免了在长时间没有语音识别结果时,系统进入卡死状态。
2.5 航向测量
为了使移动机器人能够沿指定的方向行驶并能修正由外界干扰因素产生的航向偏差,系统采用陀螺仪航向测量模块MPU - 6050,该模块将其测量的模拟量转换为可输出的数字量,并通过串口发送到S3C2440.系统通过read(fd_uartl,bur,10)函数读取相应串El,得到航向数据并写人到共享内存区S中。
2.6 超声波测距
本系统采用渡越时间法,超声波测距模块在收到发射控制信号时,换能器将发出40 kHz的连续脉冲信号。接收器的输出高电平时间和距离成正比,同时触发处理器的中断,上升沿中断开启定时器,下降沿关闭定时器,利用处理器内部的定时器1测量出输出信号的高电平的持续时间△T,经过式(1)的计算,可得到检测距离S:
S- V × △T/2 (1)
式中,V 为超声波的传播速度,常温下超声波在空气中的传播速度是340 m/s.程序中根据所编写的驱动程序,使用ioctl(fd_chao,SEND_BEGIN)、ioctl(fd_chao,SEND_STOP)控制GPIO以实现超声波的发射和停止。系统中对某个方向连续测量5次,进行中值滤波并将滤波后数据传递到信息处理进程。
2.7 电机控制
移动平台中采用L298驱动直流减速电机,平台尚未安装速度反馈单元,简化了控制模式。程序通过ioctl()控制L298以实现电机的正反转以及停止操作。
在电机驱动程序中定义了相应GPIO的输入/输出方式:ioctl(fd,TURN_LEFT)中,fd为驱动程序的文件描述符;TURN_LEFT 是命令掩码CMD,驱动程序根据命令掩码CMD对相应的GPIO赋值以控制L298的状态。
3 路径规划和避障算法
根据模糊逻辑法,移动平台能够在不确定环境中实现局部路径规划和避障。
3.1 输入输出变量的模糊化
在路径规划过程中,信息分析模块的输入量为移动平台的行驶方向信息、与障碍物之间的相对位移信息;输出量为移动平台的旋转角度和平动位移信息。
① 定义移动平台与左侧障碍物的距离为DL、与右侧障碍物的距离为DR、前方障碍物的距离为DF.模糊子集定义为{S,M,B},分别表示小、中、大,相应的距离隶属度函数如图7所示。

图7 距离隶属度函数
② 定义移动平台和目标点之间夹角为了,模糊子集定义为{LB,LS,Z,RS,RB},分别表示左大、左小、零、有小和右大。相应的角度隶属度函数如图8所示。
③ 移动平台的旋转角度φ的模糊子集定义为{TIB,TLS,TZ,TRS,TRB}。分别表示左转大、左转小、不旋转、右转小、右转大,相应的输出隶属度函数如图9所示。
3.2 建立模糊控制规则
在移动机器人远离障碍物或不存在障碍物的情况下,依据移动平台的行驶轨迹,可以先对行驶方向进行调整。当检测到障碍物接近移动平台时,移动平台应改变行驶轨迹,避免发生碰撞。移动平台的部分模糊控制规则如表1所列。

图8 角度隶属度函数

图9 输出隶属度函数
表1 模糊控制规则

3.3 模糊推理和解模糊化
根据距离隶属度函数,将超声波测量得到的不同方位的距离数据转换为模糊逻辑状态,再查找模糊控制规则,查表得到相应的输出模糊量。
解模糊化是输出模糊量映射到动作行为的过程。模糊控制器对移动平台的动作进行了分解并编码,将复杂的动作分解为一系列简单动作的叠加,使得每一个输出模糊量对应一套动作。
例如在检测到前方有障碍物并确定左转时,可以将机器人动作分解为:后退(左转,即先后退,再左转。这样可以减小机器人触碰到前方障碍物的概率。
4 实验测试
使用menuconfig命令为嵌入式Linux系统内核配置添加相应驱动程序后,进行make编译生产zImage文件。启动移动机器人系统并进入BIOS模式,将配置好的内核通过Supervivi工具烧写到NAND Flash.在系统启动后,配置Linux目录中的/etc/init.d文件,使系统启动后,自动运行所设计的程序。
如果系统初始化正常,将听到由语音模块发出的提示声:“校准完成”。此时,操作人员可以下达“前进”、“后退”或“测距”等设计好的语音指令,机器人将按照操作人员的指令完成相应的动作,还可以通过语音模块播放出测量到的距离。
结语
系统利用了Linux系统支持多任务和可裁剪的特点,结合处理器丰富的接口资源,实现了多方位超声波测距、电机控制等功能,通过对多传感器信息的融合和分析,为模糊逻辑法进行路径规划提供了判断依据。语音识别功能使得机器人和操作人员之间的人机交互变得更灵活方便。在此基础上,可以利用Linux操作系统强大的网络功能,为进一步研究服务机器人、机器人联网、机器人与机器人通信等提供了一种方案。















 工商网监
工商网监
评论