 电子发烧友App
电子发烧友App


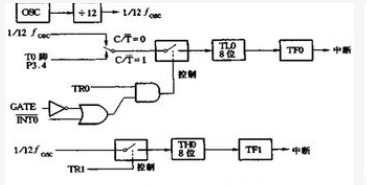
MCS-51的单片机内有两个16位可编程的定时/计数器,它们具有四种工作方式,其控制字和状态均在相应的特殊功能寄存器中,通过对控制寄存器的编程,就可方便地选择适当的工作方式。下面我们对它们的特性进行阐述。
工作方式2
当M1M0=10时,定时/计数器处于工作方式2.此时定时器的等效电阻如图4所示.我们还是以定时/计数器0为例,定时/计数器1与之完全一致。
对初学者来说,中断这个概念比较抽象,其实单片机的处理系统与人的一般思维有着许多异曲同工之妙,我们举个很贴切的比方,在日常生活和工作中有很多类似的情况。假如你正在上班,例如是编译资料,这时侯电话铃响了,你在书本上做个记号(以记下你现在正编译到某某页),然后与对方通电话,而此时恰好有客人到访,你先停下通电话,与客人说几句话,叫客人稍侯,然后回头继续通完电话,再与客人谈话。谈话完毕,送走客人,继续你的资料编译工作。
这就是日常生活和工作中的中断现象,类似的情况还有很多,从编译资料到接电话是第一次中断,通电话的过程中引有客人到访,这是第二次中断,即在中断的过程中又出现第二次中断,这就是我们常说的中断嵌套。处理完第二个中断任务后,回头处理第一个中断,第一个中断完成后,再继续你原先的主要工作。
为什么会出现这样的中断呢?道理很简单,人非三头六臂,人只有一个脑袋,在一种特定的时间内,可能会面对着两、三甚至更多的任务。但一个人又不可能在同一时间去完成多样任务,因此你只能采分析任务的轻重缓急,采用中断的方法穿插去完成它们。那么这种情况对于单片机中的中央处理器也是如此,单片机中CPU只有一个,但在同一时间内可能会面临着处理很多任务的情况,如运行主程序、数据的输入和输出,定时/和计数时间已到要处理、可能还有一些外部的更重要的中断请求(如超温超压)要先处理。此时也得象人的思维一样停下某一样(或几样)工作先去完成一些紧急任务的中断方法。
这样的一样处理方法上升到计算机理论,就是一个资源面对多项任务的处理方式,由于资源有限,面对多项任务同时要处理时,就会出现资源竞争的现象。中断技术就是为了解决资源竞争的一个可行的方法,采用中断技术可使多项任务共享一个资源,所以有些文献也称中断技术是一种资源共享技术。
[4].中断的控制
对于中断控制,在上一节中我们已经对TCON和SCON进行了分析,其实它们两个寄存器也是中断的控制寄存器,负责对中断的部分功能进行控制。我们这里谈论的是另外两个控制寄存器IE和IP。
MCS-51的对中断的开放和屏蔽是由中断允许寄存器IE控制来实现的,IE的结构格式如下。
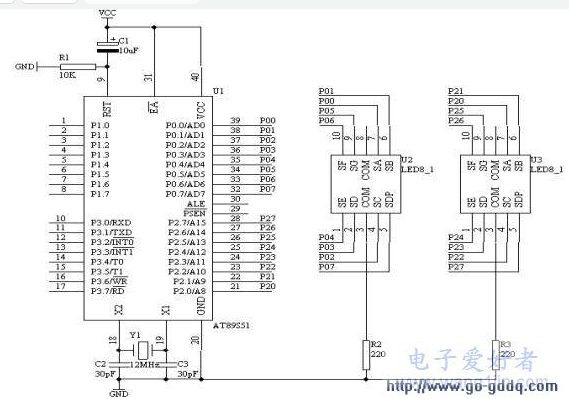
| 定时/计数器的工作方式 MCS-51单片机内部的定时/计数器的结构如图1所示,定时器T0特性功能寄存器TL0(低8位)和TH0(高8位)构成,定时器T1由特性功能寄存器TL1(低8位)和TH1(高8位)构成。特殊功能寄存器TMOD控制定时寄存器的工作方式,TCON则用于控制定时器T0和T1的启动和停止计数,同时管理定时器T0和T1的溢出标志等。程序开始时需对TL0、TH0、TL1和TH1进行初始化编程,以定义它们的工作方式和控制T0和T1的计数。 TMOD和TCON这两个特殊功能寄存器的格式参见下表: [1]. 定时/计数器的方式控制字TMOD,字节地址为89H,其格式如表1: |
| 表1 TMOD寄存器结构 | |||||||||
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | ||
| GATA | M1 | M0 | GATA | M1 | M0 | ||||
| ←T1方式字段→ | ←T0方式字段→ | ||||||||
[2]. 定时器控制积存器TCON,字节地址为88H,位地址为88H—8FH,其格式如表2: |
| 表2 TCON结构 | |||||||||
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | ||
| TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 | ||
TMOD和TCON各位的意义和用途我们将在下面的章节中予以介绍,需要注意的是,TCON的D0—D3位与中断有关,我们会在中断的内容中加以说明,MCS-51的定时/计数器共有四种工作方式,我们逐个进行讨论。 工作方式0 定时/计数器0的工作方式0电路逻辑结构见图2(定时/计数器1与其完全一致),工作方式0是13位计数结构的工作方式,其计数器由TH的全部8位和TL的低5位构成,TL的高3位没有使用。当=0时,多路开关接通振荡脉冲的12分频输出,13位计数器以次进行计数。这就是定时工作方式。当=1时,多路开关接通计数引脚(To),外部计数脉冲由银南脚To输入。当计数脉冲发生负跳变时,计数器加1,这就是我们常称的计数工作方式。 |
| 不管是哪种工作方式,当TL的低5位溢出时,都会向TH进位,而全部13位计数器溢出时,则会向计数器溢出标志位TF0进位。 我们讨论门控位GATA的功能,GATA位的状态决定定时器运行控制取决于TR0的一个条件还是TR0和INT0引脚这两个条件。当GATA=1时,由于GATA信号封锁了与门,使引脚INT0信号无效。而这时候如果TR0=1,则接通模拟开关,使计数器进行加法计数,即定时/计数工作。而TR0=0,则断开模拟开关,停止计数,定时/计数不能工作。 当GATA=0时,与门的输出端由TR0和INT0电平的状态确定,此时如果TR0=1,INT0=1与门输出为1,允许定时/计数器计数,在这种情况下,运行控制由TR0和INT0两个条件共同控制,TR0是确定定时/计数器的运行控制位,由软件置位或清“0”。 如上所述,TF0是定时/计数器的溢出状态标志,溢出时由硬件置位,TF0溢出中断被CPU响应时,转入中断时硬件清“0”,TF0也可由程序查询和清“0”。 在工作方式下,计数器的计数值范围是: 1—8192(213) 当为定时工作方式时,定时时间的计算公式为: (213—计数初值)╳晶振周期╳12 或 (213—计数初值)╳机器周期 其时间单位与晶振周期或机器周期相同。 如果单片机的晶振选为6.000MHz,则最小定时时间为: [213—(213—1)]╳1/6╳10-6╳12=2╳10-6(s)=2(us) (213—0)╳1/6╳10-6╳12=16384╳10-6(s)=16384(us)。 工作方式1 当M1,M0=01时,定时/计数器处于工作方式1,此时,定时/及数器的等效电路如图3所示,仍以定时器0为例,定时器1与之完全相同。 |
| 可以看出,方式0和方式1的区别仅在于计数器的位数不同,方式0为13位,而方式1则为16位,由TH0作为高8位,TL0为低8位,有关控制状态字(GATA、、TF0、TR0)和方式0相同。 在工作方式1下,计数器的计数值范围是: 1—65536(216) 当为定时工作方式1时,定时时间的计算公式为: (216—计数初值)╳晶振周期╳12 或 (216—计数初值)╳机器周期 其时间单位与晶振周期或机器周期相同。 如果单片机的晶振选为6.000MHz,则最小定时时间为: [213—(216—1)]╳1/6╳10-6╳12=2╳10-6(s)=2(us) (216—0)╳1/6╳10-6╳12=131072╳10-6(s)=131072(us)。 |
当M1M0=10时,定时/计数器处于工作方式2.此时定时器的等效电阻如图4所示.我们还是以定时/计数器0为例,定时/计数器1与之完全一致。
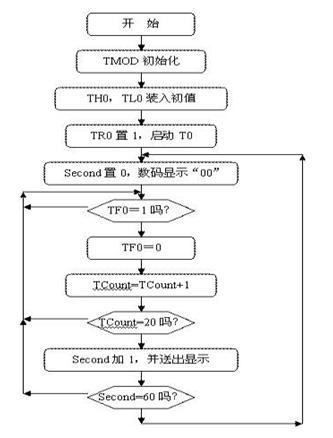
| 工作方式0和工作方式1的最大特点就是计数溢出后,计数器为全0,因而循环定时或循环计数应用时就存在反复设置初值的问题,这给程序设计带来许多不便,同时也会影响计时精度,工作方式2就针对这个问题而设置,它具有自动重装载功能,即自动加载计数初值,所以也有的文献称之为自动重加载工作方式。在这种工作方式中,16位计数器分为两部分,即以TL0为计数器,以TH0作为预置寄存器,初始化时把计数初值分别加载至TL0和TH0中,当计数溢出时,不再象方式0和方式1那样需要“人工干预”,由软件重新赋值,而是由预置寄存器TH以硬件方法自动给计数器TL0重新加载。 程序初始化时,给TL0和TH0同时赋以初值,当TL0计数溢出时,置位TF0的同时把预置寄存器TH0中的初值加载给TL0,TL0重新计数。如此反复,这样省去了程序不断需给计数器赋值的麻烦,而且计数准确度也提高了。但这种方式也有其不利的一面,就是这样一来的计数结构只有8位,计数值有限,最大只能到255。所以这种工作方式很适合于那些重复计数的应用场合。例如我们可以通过这样的计数方式产生中断,从而产生一个固定频率的脉冲。也可以当作串行数据通信的波特率发送器使用。 工作方式3 当M1M0=11时,定时/计数器处于工作方式3,此时,定时/及数器的等效电路如图3所示,仍以定时器0为例,值得注意的是,在工作方式3模式下,定时/计数器1的工作方式与之不同,下面我们分别讨论。 |
| 在工作方式3模式下,定时/计数器0被拆成两个独立的8位计数器TL0和TH0。其中TL0既可以作计数器使用,也可以作为定时器使用,定时/计数器0的各控制位和引脚信号全归它使用。其功能和操作与方式0或方式1完全相同。TH0就没有那么多“资源”可利用了,只能作为简单的定时器使用,而且由于定时/计数器0的控制位已被TL0占用,因此只能借用定时/计数器1的控制位TR1和TF1,也就是以计数溢出去置位TF1,TR1则负责控制TH0定时的启动和停止。等效电路参见图6。 由于TL0既能作定时器也能作计数器使用,而TH0只能作定时器使用而不能作计数器使用,因此在方式3模式下,定时/计数器0可以构成二个定时器或者一个定时器和一个计数器。 如果定时/计数器0工作于工作方式3,那么定时/计数器1的工作方式就不可避免受到一定的限制,因为自己的一些控制位已被定时/计数器借用,只能工作在方式0、方式1或方式2下,等效电路参见图6 |
| 在这种情况下,定时/计数器1通常作为串行口的波特率发生器使用,以确定串行通信的速率,因为已没有TF1被定时/计数器0借用了,只能把计数溢出直接送给串行口。当作波特率发生器使用时,只需设置好工作方式,即可自动运行。如要停止它的工作,需送入一个把它设置为方式3的方式控制字即可,这是因为定时/计数器本身就不能工作在方式3,如硬把它设置为方式3,自然会停止工作。 |
这就是日常生活和工作中的中断现象,类似的情况还有很多,从编译资料到接电话是第一次中断,通电话的过程中引有客人到访,这是第二次中断,即在中断的过程中又出现第二次中断,这就是我们常说的中断嵌套。处理完第二个中断任务后,回头处理第一个中断,第一个中断完成后,再继续你原先的主要工作。
为什么会出现这样的中断呢?道理很简单,人非三头六臂,人只有一个脑袋,在一种特定的时间内,可能会面对着两、三甚至更多的任务。但一个人又不可能在同一时间去完成多样任务,因此你只能采分析任务的轻重缓急,采用中断的方法穿插去完成它们。那么这种情况对于单片机中的中央处理器也是如此,单片机中CPU只有一个,但在同一时间内可能会面临着处理很多任务的情况,如运行主程序、数据的输入和输出,定时/和计数时间已到要处理、可能还有一些外部的更重要的中断请求(如超温超压)要先处理。此时也得象人的思维一样停下某一样(或几样)工作先去完成一些紧急任务的中断方法。
这样的一样处理方法上升到计算机理论,就是一个资源面对多项任务的处理方式,由于资源有限,面对多项任务同时要处理时,就会出现资源竞争的现象。中断技术就是为了解决资源竞争的一个可行的方法,采用中断技术可使多项任务共享一个资源,所以有些文献也称中断技术是一种资源共享技术。
| [1].MCS-51的中断结构 |
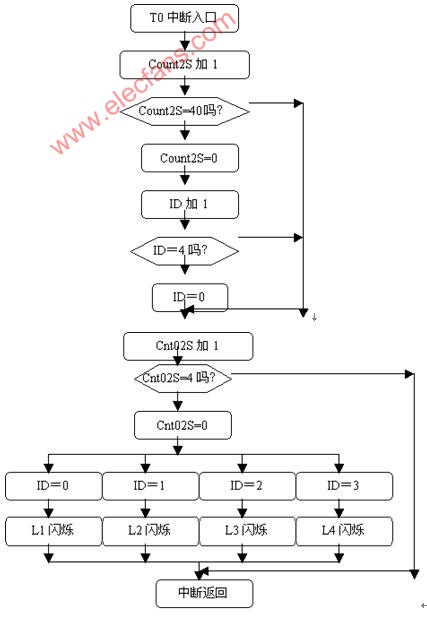
| 计算机的中断系统能够加强CPU对多任务事件的处理能力。从而使它的应用范围进一步扩大。在MCS-48结构的基础上,MCS-51在增强了I/O的种类、功能和数量的同时,也增强了中断能力。MCS-51提供了5个中断源,两个中断优先级控制,可实现两个中断服务嵌套。当CPU支持中断屏蔽指令后,可将一部分或所有的中断关断,只有打开相应的中断控制位后,方可接收相应的中断请求。程序设置中断的允许或屏蔽,也可设置中断的优先级。 [2].中断处理流程 CPU响应中断请求后,就立即转入执行中断服务程序。不同的中断源、不同的中断要求可能有不同的中断处理方法,但它们的处理流程一般都如下所述。 现场保护和现场恢复 中断是在执行其它任务的过程中转去执行临时的任务,为了在执行完中断服务程序后,回头执行原先的程序时,知道程序原来在何处打断的,各有关寄存器的内容如何,就必须在转入执行中断服务程序前,将这些内容和状态进行备份——即保护现场。就象文章开头举的例子,在看书时,电话玲响需传去接电话时,必须在书本上做个记号,以便在接完电话后回来看书时,知道从哪些内容继续往下看。计算机的中断处理方法也如此,中断开始前需将个有关寄存器的内容压入堆栈进行保存,以便在恢复原来程序时使用。 中断服务程序完成后,继续执行原先的程序,就需把保存的现场内容从堆栈中弹出,恢复积存器和存储单元的原有内容,这就是现场恢复。 如果在执行中断服务时不是按上述方法进行现场保护和恢复现场,就会是程序运行紊乱,程序跑飞,自然使单片机不能正常工作。 中断打开和中断关闭 在中断处理进行过程中,可能又有新的中断请求到来,这里规定,现场保护和现场恢复的操作是不允许打扰的,否则保护和恢复的过程就可能使数据出错,为此在进行现场保护和现场恢复的过程中,必须关闭总中断,屏蔽其它所有的中断,待这个操作完成后再打开总中断,以便实现中断嵌套。 中断服务程序 既然有中断产生,就必然有其具体的需执行的任务,中断服务程序就是执行中断处理的具体内容,一般以子程序的形式出现,所有的中断都要转去执行中断服务程序,进行中断服务。 中断返回 执行完中断服务程序后,必然要返回,中断返回就是被程序运行从中断服务程序转回到原工作程序上来。在MCS-51单片机中,中断返回是通过一条专门的指令实现的,自然这条指令是中断服务程序的最后一条指令。 [3].MCS-51的中断源 8051有5个中断源,它们是两个外中断INT0(P3.2)和INT1(P3.3)、两个片内定时/计数器溢出中断TF0和TF1,一个是片内串行口中断TI或RI,这几个中断源由TCON和SCON两个特殊功能寄存器进行控制。 在前一节,我们已对TCON的控制位进行了说明,现在继续对它的中断控制有关的位进行谈论。TCON寄存器的结构如下: |
| 表1 TCON寄存器结构 | |||||||||
| TCON | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 | ||
| 位地址 | 8FH | 8EH | 8DH | 8CH | 8BH | 8AH | 89H | 88H | |
| · IE1:外部边沿触发中断1请求标志,其功能和操作类似于TF0。 · IT1:外部中断1类型控制位,通过软件设置或清楚,用于控制外中断的触发信号类型。IT1=1,边沿触发。IT=0是电平触发。 · IE0:外部边沿触发中断0请求标志,其功能和操作类似于IE1。 · IT0:外部中断0类型控制位,通过软件设置或清楚,用于控制外中断的触发信号类型。其功能和操作类似于IE1。 SCON是串行口控制寄存器,字节地址为98H,SCON的低二位是串行口的发送和接收中断标志,其格式如下: |
| 表2 SCON寄存器结构 | |||||||||
| SCON | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| - | - | - | - | - | - | TI | RI | ||
| 位地址 | 99H | 98H | |||||||
| · TI:MCS-51串行口的发送中断标志,在串行口以方式0发送时,每当发送完8位数据,由硬件置位。如果以方式1、方式2或方式3发送时,在发送停止位的开始时TI被置1,TI=1表示串行发送器正向CPU发出中断请求,向串行口的数据缓冲器SBUF写入一个数据后就立即启动发送器继续发送。但是CPU响应中断请求后,转向执行中断服务程序时,并不清零TI,TI必须由用户的中断服务程序清“0”,即中断服务程序必须有“CLR TI”或“ANL SCON, #0FDH”等指令来清零TI。 · RI:串行口接收中断标志.若串行口接收器允许接收,并以方式0工作,每当接收到8位数据时,RI被置1,若以方式1、2、3方式工作,当接收到半个停止位时,TI被置1,当串行口一方式2或3方式工作,且当SM2=1时,仅当接收到第9位数据RB8为1后,同时还要在接收到半个停止位时,RI被置1。RI为1表示串行口接收器正向CPU申请中断。同样RI标志栩栩如生由用户的软件清“0”。 |
对于中断控制,在上一节中我们已经对TCON和SCON进行了分析,其实它们两个寄存器也是中断的控制寄存器,负责对中断的部分功能进行控制。我们这里谈论的是另外两个控制寄存器IE和IP。
MCS-51的对中断的开放和屏蔽是由中断允许寄存器IE控制来实现的,IE的结构格式如下。
| 表3 IE寄存器结构 | |||||||||
| IE | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| EA | - | - | ES | ET1 | EX1 | ET0 | EX0 | ||
| 位地址 | AFH | ACH | ABH | AAH | A9H | A8H | |||
| 下面我们对IE寄存器的各控制位进行介绍: · EA:中断总控制位,EA=1,CPU开放中断。EA=0,CPU禁止所有中断。 · ES:串行口中断控制位,ES=1允许串行口中断,ES=0,屏蔽串行口中断。 · ET1:定时/计数器T1中断控制位。ET1=1,允许T1中断,ET1=0,禁止T1中断。 · EX1:外中断1中断控制位,EX1=1,允许外中断1中断,EX1=0,禁止外中断1中断。 · ET0:定时/计数器T0中断控制位。ET1=1,允许T0中断,ET1=0,禁止T0中断。 · EX0:外中断0中断控制位,EX1=1,允许外中断0中断,EX1=0,禁止外中断0中断。 MCS-51有两个中断优先级,即高优先级和低优先级,每个中断源都可设置为高或低中断优先级。如果有一低优先级的中断正在执行,那么高优先级的中断出现中断请求时,CPU则会响应这个高有限级的中断,也即高优先级的中断可以打断低优先级的中断。而若CPU正在处理一个高优先级的中断,此时,就算是有低优先级的中断发出中断请求,CPU也不会理会这个中断,而是继续执行正在执行的中断服务程序,一直到程序结束,执行最后一条返回指令,返回主程序然后再执行一条指令后才会响应新的中断请求。 为了实现上述功能,MCS-51的中断系统有两个不可寻址的优先级状态触发器,一个指出CPU是否在执行高优先级中断服务程序,另一个指出CPU是否正在执行低优先级的中断服务程序,这两个中断触发器的1状态分别屏蔽所有中断申请和同一级别的其他中断申请,此外,MCS-51还有一个申请优先级寄存IP,IP的格式如下,字节地址是B8H。 |
| 表4 IP中断控制寄存器结构 | |||||||||
| IP | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| - | - | - | PS | PT1 | Px1 | PT0 | PX0 | ||
| 位地址 | BCH | BBH | BAH | B9H | B8H | ||||
| · PS:串行口中断口优先级控制位,PS=1,串行口中断声明为高优先级中断,PS=0,串行口定义为低优先级中断。 · PT1:定时器1优先级控制位。PT1=1,声明定时器1为高优先级中断,PT1=0定义定时器1为低优先级中断。 · PX1:外中断1优先级控制位。PT1=1,声明外中断1为高优先级中断,PX1=0定义外中断1为低优先级中断。 · PT0:定时器0优先级控制位。PT1=1,声明定时器0为高优先级中断,PT1=0定义定时器0为低优先级中断。 · PX0:外中断0优先级控制位。PT1=1,声明外中断0为高优先级中断,PX1=0定义外中断0为低优先级中断。 [5].中断的响应 MCS-51CPU在每一个机器周期顺序检查每一个中断源,在机器周期的S6按优先级处理所有被激活的中断请求,此时,如果CPU没有正在处理更高或相同优先级的中断,或者现在的机器周期不是所执行指令的最后一个机器周期,或者CPU不是正在执行RETI指令或访问IE和IP的指令(因为按MCS-51中断系统的特性规定,在执行完这些指令之后,还要在继续执行一条指令,才会响应中断),CPU在下一个机器周期响应激活了的最高级中断请求。 中断响应的主要内容就是由硬件自动生成一条长调用LCALL addr16指令,这里的addr16就是程序存储器中相应的中断区入口地址,这些中断源的服务程序入口地址如下: |
| 表5 个中断源的服务程序入口地址 | |||||||||
| 中断源 | 入口地址 | ||||||||
| 外中断0 | 0003H | ||||||||
| 定时/计数器0 | 000BH | ||||||||
| 外中断1 | 0013H | ||||||||
| 定时/计数器0 | 001BH | ||||||||
| 串行口中断 | 0023H | ||||||||
| 生成LCALL指令后,CPU紧跟着便执行之.首先将PC(程序计数器)的内容压入堆栈保护断点,然后把中断入口地址赋予PC,CPU便按新的PC地址(即中断服务程序入口地址)执行程序。 值得一提的是,各中断区只有8个单元,一般情况下(除非中断程序非常简单),都不可能安装下一个完整的中断服务程序。因此,通常是在这些入口地址区放置一条无条件转移指令,使程序按转移的实际地址去执行真正的中断服务程序。 |










 工商网监
工商网监
评论