 电子发烧友App
电子发烧友App


一、定时/计数器PWM设计要点
根据PWM((脉宽调制(PWM:(Pulse Width ModulaTION)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的模式))的特点,在使用ATmega128的定时/计数器设计输出PWM时应注意以下几点:
1.首先应根据实际的情况,确定需要输出的PWM频率范围,这个频率与控制的对象有关。如输出PWM波用于控制灯的亮度,由于人眼不能分辨42Hz以上的频率,所以PWM的频率应高于42Hz,否则人眼会察觉到灯的闪烁。
2.快速PWM可以的到比较高频率的PWM输出,但占空比的调节精度稍微差一些。此时计数器仅工作在单程正向计数方式,计数器的上限值决定PWM的频率,而比较匹配寄存器的值决定了占空比的大小。PWM频率的计算公式为:
3.然后根据需要PWM的频率范围确定ATmega128(是ATMEL公司的 8位系列单片机的最高配置的一款单片机,应用极其广泛)定时/计数器的PWM工作方式。AVR定时/计数器的PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
PWM频率 = 系统时钟频率/(分频系数*(1+计数器上限值)) AVR单片机是1997年由Atmel公司研发出的增强型内置Flash的RISC(Reduced 根据PWM((脉宽调制(PWM:(PULSE Width Modulation)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的模式))的特点,在使用ATmega128的定时/计数器设计输出PWM时应注意以下几点:
1.首先应根据实际的情况,确定需要输出的PWM频率范围,这个频率与控制的对象有关。如输出PWM波用于控制灯的亮度,由于人眼不能分辨42Hz以上的频率,所以PWM的频率应高于42Hz,否则人眼会察觉到灯的闪烁。
2.快速PWM可以的到比较高频率的PWM输出,但占空比的调节精度稍微差一些。此时计数器仅工作在单程正向计数方式,计数器的上限值决定PWM的频率,而比较匹配寄存器的值决定了占空比的大小。PWM频率的计算公式为:
3.然后根据需要PWM的频率范围确定ATmega128(是Atmel公司的 8位系列单片机的最高配置的一款单片机,应用极其广泛)定时/计数器的PWM工作方式。AVR定时/计数器的PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
PWM频率 = 系统时钟频率/(分频系数*(1+计数器上限值)) AVR单片机是1997年由ATMEL公司研发出的增强型内置Flash的RISC(Reduced InSTruction Set CPU) 精简指令集高速8位单片机。
4.频率(相位)调整PWM模式的占空比调节精度高,但输出频率比较低,因为此时计数器仅工作在双向计数方式。同样计数器的上限值决定了PWM的频率,比较匹配寄存器的值决定了占空比的大小。PWM频率的计算公式为:
PWM频率 = 系统时钟频率/(分频系数*2*计数器上限值))
5.快速PWM模式适合要求输出PWM频率较高,但频率固定,占空比调节精度要求不高的应用。
6.相位调整PWM模式适合要求输出PWM频率较低,但频率固定,占空比调节精度要求高的应用。当调整占空比时,PWM的相位也相应的跟着变化(PhaseCorrect)。
7.在PWM方式中,计数器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。
8.频率和相位调整PWM模式适合要求输出PWM频率较低,输出频率需要变化,占空比调节精度要求高的应用。此时应注意:不仅调整占空比时,PWM的相位会相应的跟着变化;而一但改变计数器上限值,即改变PWM的输出频率时,
会使PWM的占空比和相位都相应的跟着变化(Phase and Frequency Correct)。
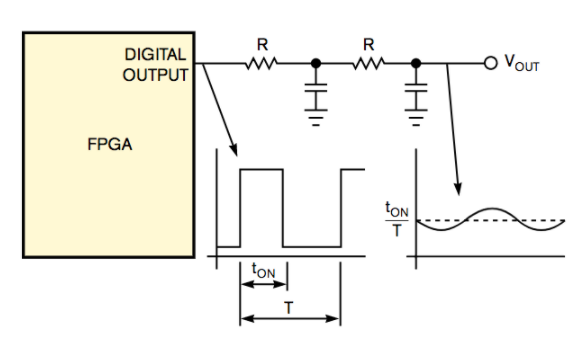
二、 PWM应用设计参考
PWM模式可以分成快速PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。WM和频率(相位)调整PWM两大类。
设置提供调制方波的片上定时器/计数器的周期
在PWM控制寄存器中设置接通时间
设置PWM输出的方向,这个输出是一个通用I/O管脚
启动定时器
使能PWM控制器PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
下面在示例中使用PWM方式来产生一个1KHz左右的正弦波,幅度为0-Vcc/2。
首先按照下面的公式建立一个正弦波样本表,样本表将一个正弦波周期分为128个点,每点按7位量化(127对应最高幅值Vcc/2):
f(x) = 64 + 63 * sin(2πx/180) x∈[0…127]
如果在一个正弦波周期中采用128个样点,那么对应1KHz的正弦波PWM的频率为128KHz。实际上,按照采样频率至少为信号频率的2倍的取样定理来计算,PWM的频率的理论值为2KHz即可。考虑尽量提高PWM的输出精度,实际设计使用PWM的频率为16KHz。这意味着在128点的正弦波样本表中,每隔8点取出一点作为PWM的输出。
程序中用的ATmega128的8位T/C0工作模式为相位调整PWM模式输出,系统时钟为8MHz,分频系数为1,其可以产生最高PWM频率为:
8000000Hz / 510 =
15686Hz。每16次输出构成一个周期正弦波,正弦波的频率为980.4Hz。PWM由OC0(PB4)引脚输出。参考程序如下(ICCAVR)。
//ICC-AVR application builder : 2004-08
// Target : M128
// Crystal: 8.0000Mhz
#include 《iom128v.h》
#include 《macros.h》
#pragma data:code
// 128点正弦波样本表
const unsigned char auc_SinParam[128] = {
64,67,70,73,76,79,82,85,88,91,94,96,99,102,104,106,109,111,113,115,117,118,120,121,
123,124,125,126,126,127,127,127,127,127,127,127,126,126,125,124,123,121,120,118,
117,115,113,111,109,106,104,102,99,96,94,91,88,85,82,79,76,73,70,67,64,60,57,54,51,48,
45,42,39,36,33,31,28,25,23,21,18,16,14,12,10,9,7,6,4,3,2,1,1,0,0,0,0,0,0,0,1,1,2,3,4,6,
7,9,10,12,14,16,18,21,23,25,28,31,33,36,39,42,45,48,51,54,57,60};
#pragma data:data
unsigned char x_SW = 8,X_LUT = 0;
#pragma interrupt_handler timer0_ovf_isr:17
void timer0_ovf_isr(void)
{
X_LUT += x_SW; // 新样点指针
if (X_LUT》 127) X_LUT -= 128; // 样点指针调整
OCR0 = auc_SinParam[X_LUT]; // 取样点指针到比较匹配寄存器
}
void main(void)
{
DDRB |= 0x10; // PB4(OC0)输出
TCCR0 = 0x71; // 相位调整PWM模式,分频系数=1,正向控制OC0
TIMSK = 0x01; // T/C0溢出中断允许
SEI(); // 使能全局中断
while(1)
{……};
}
每次计数器溢出中断的服务中取出一个正弦波的样点值到比较匹配寄存器中,用于调整下一个PWM的脉冲宽度,这样在PB4引脚上输出了按正弦波调制的PWM方波。当PB4的输出通过一个低通滤波器后,便得到一个980.4Hz的正弦波了。如要得到更精确的1KHz的正弦波,可使用定时/计数器T/C1,选择工作模式10,设置ICR1=250为计数器的上限值。
ATMEL在系统级集成方面所拥有的世界级专业知识和丰富的经验使其产品可以在现有模块的基础上进行开发,保证最小的开发延期和风险。凭借业界最广泛的知识产权(IP)组合,Atmel提供电子系统完整的系统解决方案的厂商。 这使客户能够带领他们与市场的电子产品的体积更小,更聪明,更符合成本效益比以往任何时候都通用的服务。 Atmel集成电路的主要集中在消费,工业,安全,通信,计算和汽车市场。在ATMEL公司网站上,给出了使用一个定时/计数器实现双音频拨号(双音频用两中频率组合表示一个号码。比如你拨7 就是 1230 和 990HZ两种频率。5 为1230 和 1100, 相当与不同的二进制组合。)












 工商网监
工商网监
评论