 电子发烧友App
电子发烧友App


FOC 计算公式
1. PMSM.C 中的ADC1Interrupt()AD中断处理函数中调MeasCurr.S 中MeasCompCurr:
读入ACD1,ACD2(带符号小数)
校正:ADC1*CarrADC1-offset=qIa ADC2*CarrADC2-offset=qIb
2. PMSM.C 中的ADC1Interrupt()中调CalculateParkAngle()对相角θ处理
先调用smcpos.c 滑模观测器中SMC_Position_Estimation(),之中
①又调用smc.s 中的CalcEstI 计算估算电流I :
EstIalpha=Gsmopos*(Valpha-Ealpha-Zalpha)+Fsmopos*EstIalpha
---- Isα(n+1)=G*(Vα(n)-Eα(n)-Zα(n))+F*αIs α(n)
EstI beta=Gsmopos*(V beta-E beta-Z beta)+Fsmopos*EstI beta
---- Isβ(n+1)=G*(Vβ(n)-Eβ(n)-Zβ(n))+F*Isβ(n)
②调smc.s 中CalcIError 计算实测电流与估算电流的偏差:
IalphaError = EstIalpha – Ialpha
Ibeta Error = EstIbeta – Ibeta
---- ΔI α= Is α- I α ΔI β= Is β- I β
③调smc.s 中CalcZalpha ,CalcZbeta 计算Z α, Zβ:
当abs(IalphaError)《 MaxSMCError时 Zalpha = (Kslide * IalphaError) / MaxSMCError
当abs(IalphaError)≥ MaxSMCError时
Zalpha 为正时Zalpha= Kslide 为负时Zalpha=-Kslide
当abs(I betaError)《 MaxSMCError时
Zbeta = (Kslide * IbetaError) / MaxSMCError
当abs(I beta Error)≥ MaxSMCError时
Z beta 为正时Z beta = Kslide 为负时Z beta=-Kslide
---- 当|ΔI α|《Δmax 时:Z α= Ks*ΔI α/Δmax
当|ΔI α|≥Δmax 时:|Z α|= Ks
当|ΔI β|《Δmax 时:Z β= Ks*ΔI β/Δmax
当|ΔI β|≥Δmax 时:|Z β|= Ks
④调smc.s 中CalcBEM 按低通滤波器公式计算反电动势: Ealpha = Ealpha + Kslf * (Zalpha - Ealpha)
Ebeta = Ebeta + Kslf * (Zbeta – Ebeta)
两级滤波,后级滤波系数为KslfFinal
---- Eα(n)= Eα(n-1)+Ksf*(Zα(n-1)- Eα(n-1))
E β(n)= Eβ(n-1)+Ksf* (Zβ(n-1)- Eβ(n-1))
⑤调atan2CORDIC.s 中反正切函数atan2CORDIC 计算相角
Theta = atan2CORDIC(-EalphaFinal, EbetaFinal)
---- θ=atan(-Eα/ Eβ)
⑥在smcpos.c 中的SMC_Position_Estimation函数中进行速度预算
PrevTheta = s-》Theta
AccumThetaCnt++
if (AccumThetaCnt == IRP_PERCALC)
Omega = AccumTheta
---- 求累加角Σθ+=θ(n)-θ(n-1)
更新θ(n-1)= θ(n) 累加次数m(θCnt)+=1
当m = M (速度计算需要的PWM 定时次数) 时,速度预算值ω=Σθ
此前仅算出ω(Omega),未算 V(速度Speed) ,即未找到V=Kv*ω
Kv=60/T(测算速度时间)/磁极对数
⑦调smc.s 中CalcOmegaFltred 对ω进行数字滤波
OmegaFltred=OmegaFltred+FiltOmCoef*(Omega-OmegaFltred)
---- ωfl (n)= ωfl (n-1)+ Kωfl *[ω(n)- ωfl (n-1)]
Kωfl:滤波系数=2πFc/Fpwm Fpwm:脉宽调制频率
Fc: 滤波器截止频率(电机最低转速*磁极对数/60)
⑧在smcpos.c 中的SMC_Position_Estimation函数中计算滤波器系数 ??
Kslf = OMEGA0 * _PI / IRP_PERCALC;
KslfFinal = OMEGA0 * _PI / IRP_PERCALC
⑨在smcpos.c 中的SMC_Position_Estimation函数中进行相位补偿计算
ThetaOffset=OmegaFltred*(SLOPEFRACn+SLOPEINTn)+CONSTANTn
不同的速度有不同的补偿,程序分几个频段, 式中3常数取不同值(n 不同)。
---- θΔ =ωfl *(Kscn+Kstn)+ Kcn
3. PMSM.C 中的ADC1Interrupt()中调clrkepark.s 的ClarkePark 进行座标变化
Ialpha = Ia
Ibeta = Ia*dOneBySq3 + 2*Ib*dOneBySq3;
Id = Ialpha*cos(Angle) + Ibeta*sin(Angle)
Iq = -Ialpha*sin(Angle) + Ibeta*cos(Angle)
─ ---- Iα= Ia Iβ=(Ia+2Ib)/√3
Id = Iα*Cosθ+Iβ*Sinθ Iq = -Iα*Sinθ+Iβ*Cosθ
4. PMSM.C 中的ADC1Interrupt()中调DoControl()进行Id,Iq,Speed 的PI 迭代
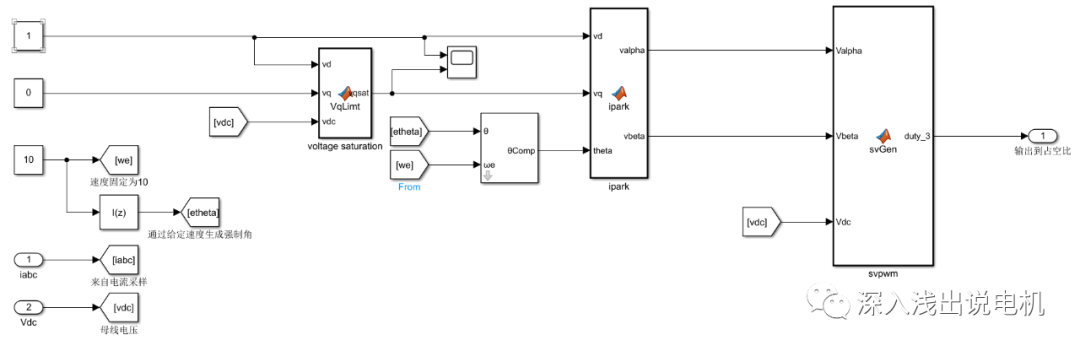
5. 调trig.s 中的SinCos 计算qSin θ q Cosθ值
6. 调InvPark.s 中的InvPark 计算 qVα qVβ值
7. 调CalcRef.s 中的CalcRefVec 由qV α qVβ计算Vr 1 Vr2 Vr3 值
8. 调SVGEN.s 中的CalcSVGen 由Vr 1 Vr2 Vr3计算3相PWM 占空比。
强制角ParkParm.qAngle (输出PWM 角)和滑模估算角Smc1.Theta 电机启动时只用强制角线性递增(称斜坡法) Startup_Lock += 1 达到转速后计算强制角和估算角偏差,对强制角进行修正
计算保存Δθ:Theta_error = ParkParm.qAngle - smc1.Theta 修正量:对强制角修正:ParkParm.qAngle += Startup_Ramp
Δθ每次±0.05°直到≤0.05°:Theta_error += _0_05DEG
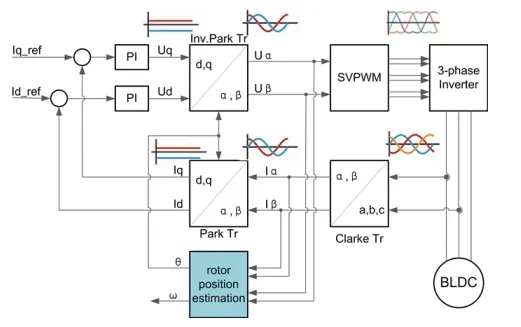
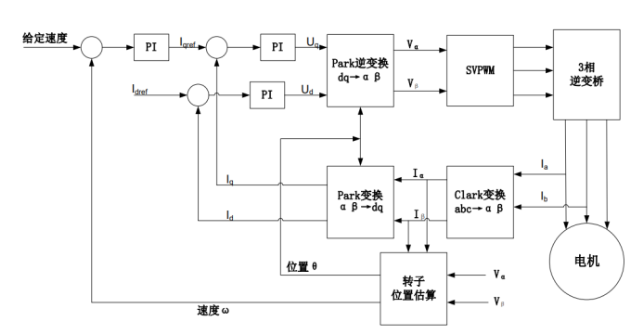
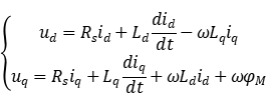
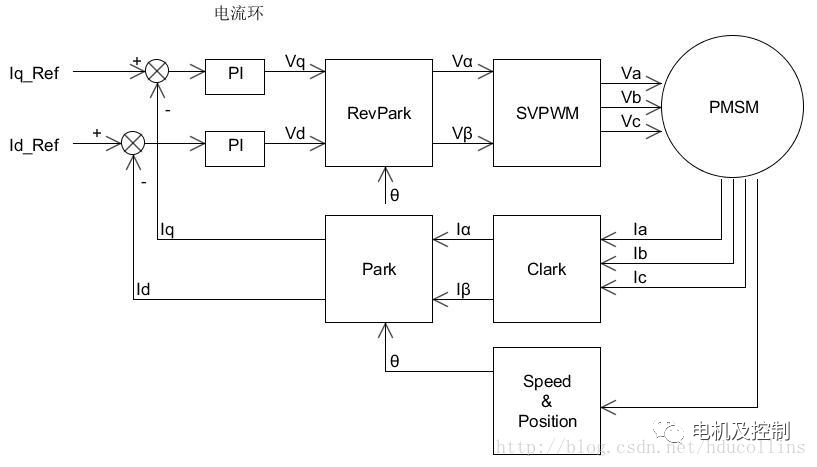
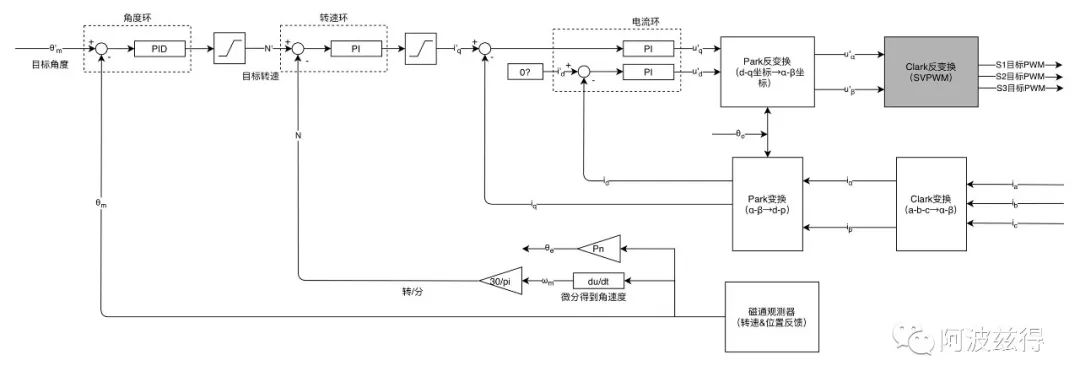
FOC(或矢量控制)算法的简要步骤
以下总结了控制PMSM的FOC算法步骤。
1.先测量三相定子电流ia和ib。根据ia+ib+ic=0,计算来自两个电流传感器的电流。
2.将三相电流转换到2轴坐标系中。该转换根据测量的ia、ib和ic值得到变量iα和iβ。从定子的角度来说,iα和iβ是时变正交电流值。该步骤称为Park变换。
3.采用控制循环上一次迭代时计算的变换角旋转2轴坐标系,使之与转子磁通对齐。该转换根据iα和iβ得到变量id和iq。现在,将正交电流id和iq变换到旋转坐标系中。在稳态条件下,id和iq将保持恒定。该步骤称为Clarke变换。













 工商网监
工商网监
评论