 电子发烧友App
电子发烧友App


1、引言
汽车数量越来越多,而传统的交通信号灯控制模式采用的是定时控制,由于车流量是随时变化的,当此时没有车通过,而相对的车要等到此方向的绿灯结束显示红灯才能通过,在时间和空间方面的应变性能较差,这样不仅浪费了时间,还使得相对方向的车辆造成“堵车”现象。为克服这种少车路口绿灯时无车通行或多车路口绿灯通行时间短而堵车等资源浪费的现象,出现了智能交通灯控制系统。
目前的智能交通灯控制系统有以红外感应车流量的、有桉预定时间段改变通行时间的、有以电视监控信息来干预的等多种方法与手段,各有特点。本设计是一个以车流量为核心的智能交通灯自动控制系统,通过使用地感线圈检测车流量,实现了十字路口交通灯的智能控制。随着数字化城市建设的进程,对城市交通的要求不仅是智能化,而是网络化、信息化。
2、系统结构
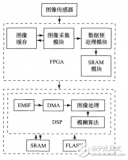
系统主控制器选用西门子的S7-300系列PLC,车流量检测装置采用基于电磁感应原理的地感线圈,系统由PLC控制器、信号检测装置、信号转换装置、紧急按钮、十字路口交通灯组和以太网接口等几部分组成,如图1所示。
每个路口的各个车道均安装地感线圈,当地感线圈感应到车量通过的信号后,该信号通过信号转换装置转换为0~10V的标准电压信号输入到PLC,PLC控制系统通过判断该信号的状态,经过数据处理和计算得到各路口实际车流量的数据,自动控制系统根据各个路口的实际车流量自动调节其所在路口的信号灯的通行状态。同时,系统在各个人行路口设置了紧急按钮,按动此按钮也会起到干预路口交通信号灯状态的作用。该系统所设置的以太网接口,为实现多个路口之间的交通灯的联锁控制、交通灯的远程计算机监控和交通系统的网络化、信息化管理奠定了基础。

图1 系统结构图
系统选用的西门子S7-300系列PLC主要包括,CPU314IFM模块1个、SM332开关量模块1个、SM334模拟量模块1个,电源模块1个、通信模块1个。该PLC为24V供电,系统共有36点开关量输入信号、32点开关量输出信号、6路模拟量输入信号、4路模拟量输出信号的容量,满足了一个3~4车道的十字路口交通灯的控制要求。
系统控制的是一个实际的普通十字路口交通灯,由主干道和支干道组成,每个方向都有三个车道,即直行车道、左转弯车道和右转弯车道;每个路口均设有红、黄、绿色直行和绿色转弯方向灯。
3、车流量检测
3.1、地感线圈
地感线圈是本智能交通自控系统中的最主要的检测元件,主要由埋设在地表面下的线圈和信号提取与输出装置构成。地感线圈的技术规格由车道的大小和埋设的深度决定,地感线圈主要由内径,外径,线径和匝数四大因素组成,一旦这四大因素确定,线圈的规格型号即可确定。
地感线圈工作在最佳状态下,线圈的电感量应保持在100uH-300uH之间,在线圈电感不变的情况下,线圈的匝数与周长有关系,周长越小、匝数就越多,线圈匝数参考表1。
表1 线圈匝数参考表

由于道路下可能埋设有各种电缆管线、钢筋、下水道盖等金属物质,这些都会对线圈的实际电感值产生很大影响,在实际施工时应使用电感测试仪实际测试地感线圈的电感值来确定施工的实际匝数,只要保证线圈的最终电感值在合理的工作范围之内(如在100uH-300uH之间),否则,应对线圈的匝数进行调整。
在理想状况下(不考虑一切环境因素的影响),地感线圈只考虑面积的大小(或周长)和匝数,可以不考虑导线的材质。但在实际工程中,必须考虑导线的机械强度和高低温抗老化问题,在某些环境恶劣的地方还必须考虑耐酸碱腐蚀问题。在实际的工程中,建议采用0.1cm以上铁氟龙高温多股软导线。
以一个60X60cm的模拟十字路口交通模型为例,根据实际十字路口的尺寸按比例缩放,得到的车道大小约为3cm。设计时选择的线圈内径为1.8*2.3cm、外径为2.0*2.5cm、线径为0.05cm、扎数为180n。
3.2、信号转换装置
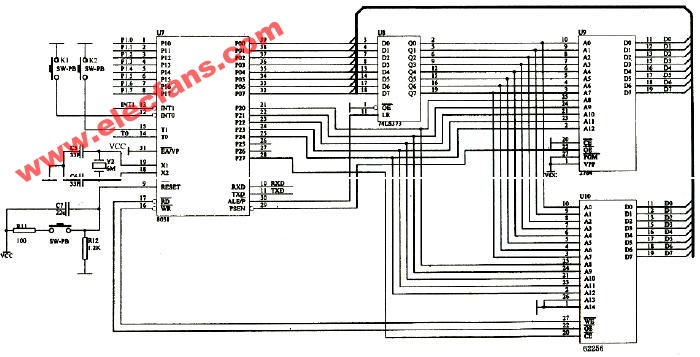
地感线圈的工作原理基于振荡电路原理,信号转换装置是由一种基于电磁感应原理的信号转换线路构成,该转换电路主要由两只三极管组成共射极振荡器和地感线圈(电感元件)、电阻、电容等元件组成的耦合振荡电路组成,信号转换装置的电路原理如图2所示。

图2 信号转换装置电路原理图
Ul和U2组成共射极振荡器,电阻R3是两只三极管的公共射极电阻,并构成正反馈,地感线圈T作为检测器谐振电路中的一个电感元件,与振荡回路一起形成LC谐振。当有大的金属物(汽车)通过时,由于空间介质发生变化引起了振荡频率的变化(有金属物体时振荡频率升高),将会使线圈中单位电流产生的磁通量增加,从而导致线圈电感值发生微小变化,进而改变LC谐振的频率,这个频率的变化就作为有汽车经过地感线圈的路面时的输入信号,再将此信号通过由R7和C3组成的LC滤波电路,输出稳定的直流电压,此电压即可输入到PLC系统。
3.3、地感线圈的埋设方法
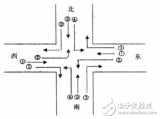
以十字路口中一个方向的道路为例,考虑到右行通道车辆可以直接通过,只在直行通道和左行通道上埋设地感线圈。在每个通道上均埋设了两个地感线圈,具体埋设位置参考图3。前一个紧挨停车线,检测驶离该车道的车量数;后一个埋设在距停车线5~10cm处,一般考虑埋设在预计可正常停车数量所占位置的1~2倍处,检测驶入该车道的车量数;二者之差,既是该车道还存在的车辆数,也是等待通行的车辆数,此数据也是控制该路口交通灯状态的依据。

图3 地感线圈埋设平面位置图
地感线圈埋设首先要用切路机在路面上切出槽来,在四个角上进行450倒角处理,防止尖角破坏线圈电缆;切槽宽度一般为0.4~0.8cm,深度3~5cm,同时还要为线圈引线切一条通到路边的槽,将双绞好的输出引线通过引出线槽引出。地感线圈埋设是在车道路面铺设完成后或铺设路面的同时进行的,在线圈埋好以后,为了加强保护,用沥青或软性树脂将切槽封上。
线圈安装时,应该尽量避免焊接点,万不得已则必须良好接触并做好绝缘;为避免电磁干扰,馈线使用屏蔽电缆,屏蔽电缆的屏蔽线在信号转换器端良好接地;使用双绞线,防止两个相邻线圈的馈线或与电源220v之间的相互干扰。
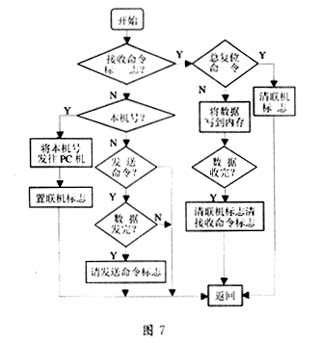
4、系统软件设计
系统的输入输出信号及其I/O地址分配如表2所示。
表2 I/O分配表

系统的主控制程序设计成功能模块式,由正常运行模块、车流量信号智能处理模块、紧急按钮动作模块组成。
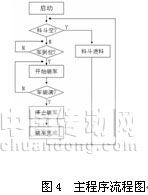
正常运行模块:正常情况下各个路口的各个时间段的车流量基本相等,各个信号灯按照程序所设定的固定时间运行;当某路口的车流量发生变化,检测到路口存在的车辆数达到设定值时,自动调用车流量信号智能处理子程序;当某个路口发生紧急事件,人要紧急通过时,按下该路口的紧急按钮,程序自动调用紧急按钮信号子程序;执行完子程序后,主程序自动返回继续检索各种运行条件与参数的状态,程序控制框图如图4。
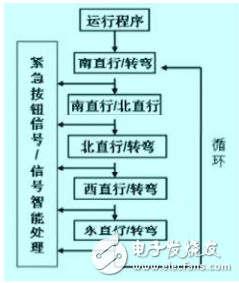
图4 正常运行模块程序框图
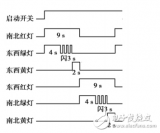
车流量信号智能处理模块:以一个方向为例,时序控制如图5所示。

图5 时序图
当该车道的绿灯已经亮了20S,仍没有检测到有车辆通过时:表示无车辆等待通过,若其它三个路口也无车,则维持原正常通行时间;若其它三个路口只要有一个路口有车,则立即结束该路口的绿灯通行时间,给有车的路口“让道”。
当该车道的绿灯已经亮了40S,检测到有车辆“累积”在此车道上:表示有车辆等待通过,则要根据实际的车辆数决定是按正常的通行时间控制,还是延迟通行时间,车辆越多延迟时间越长;同时考虑其它路口等待的车辆状态,是适当延时、还是无限延时。延迟时间段的划分数量及其具体延迟时间根据各实际路口的状态进行设定。
程序根据在不同的时间段检测的各车道的实际车流量数,决定通行时间的长短;也就是根据各路口的实际车流量,智能地处理各路口的通行时间。
紧急按钮动作模块:系统在人行道上安装了紧急按钮,具有优先权,如在人行道上发生了突发事件,只要按一下该方向的紧急按钮,5秒钟后此通道及可通行;紧急事故通过后,又恢复到正常的状态。
5、系统功能
智能化,根据各路口车流量的大小自动调节各路口信号灯的通行时间,在传统十字路口交通灯控制的基础上,克服了传统系统的少车路口绿灯无车通行或多车路口绿灯时间短而堵车等资源浪费的缺点,提高了通行效率,减轻路口的交通堵塞压力。
人性化,系统在各个路口都设有人行通道的紧急通行按钮,能灵活地控制系统实现实时、延时切换,并具有一定的优先权,方便紧急事故中的人通行。
网络化,系统的以太网接口,可以实现多个路口之间的交通灯的联锁自动控制,实现对整个交通状况的远程监控,同时也为城市交通的数字化、信息化奠定了基础。实用性,系统性价比较优,且安装方便。
6、结束语
以车流量的智能交通灯控制系统,在道路一定、车辆一定的情况下,对解决城市交通问题、提高道路利用率、提升交通自动化水平和管理水平方面具有一定的意义。本设计投资少、制作简单、安装方便、硬件稳定可靠、功能实用,具有实际推广应用价值。












 工商网监
工商网监
评论