 电子发烧友App
电子发烧友App


随着经济的发展,汽车数量越来越多,城市道路压力越来越大。交通信号灯作为管制交通流量、提高道路通行能力的有效手段,对减少交通事故有明显效果。而传统的交通灯采用固定的时间控制,不能根据车流量大小来控制红绿灯时间,经常出现通行时间与车流量不适应情况,不仅浪费了时间,容易造成“堵车”现象。为克服这种少车路口绿灯时无车通行或多车路口绿灯通行时间短而堵车等资源浪费的现象,本文采用超声计数的方式设计了一种实时监测车流量的智能交通灯控制,通过动态调节增加了灵活性和实用性。
1、系统结构
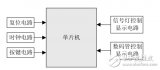
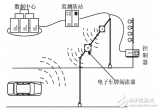
系统主要由微控制器模块、电源管理模块、超声车流量检测模块、红外遥控模块、十字路口交通灯组和以太网接口等几部分组成,系统整体框图如图1所示。系统在每个交通路口安装超声检测装置,单片机通过该装置实时检测路口的状态,根据程序逻辑控制交通灯组,实现对交通灯的智能控制。由于单片机的调控能力有限,在特殊的情况下需要交警进行手动控制。虽然现行使用的交通灯控制系统提供人为干预功能,但都是由交警在远离路口的交通灯机箱处进行控制,非常不方便,为此设计了红外遥控模块,交警在十字路口的任何地方都能够实现对交通灯的控制。

图1 系统整体框图
系统中预留了以太网接口模块。采集的数据可通过节点传输到交通部门的计算机主机,提供远程监测交通路口的状况功能,同时还允许对交通灯进行远程的控制,为交通系统的网络化、信息化管理奠定基础。
系统的MCU选择为MSP430F449,主要完成本系统对路口16个监测装置的信号检测,数据处理和对4个灯组的控制。
2、车辆检测
2.1、超声检测模块的安装
考虑到右转车道车辆可以直接通过,只在直行车道和左转车道上架设超声传感器。在每个方向的通道上均架设两组超声传感器,具体架设位置如图2所示。前一组紧挨停车线,检测驶离该方向通道的车辆数(下文中称其为超声模块组1);后一组架设在距停车线80~100m处(下文中称其为超声模块组2),检测驶入该方向通道的车辆数。两者之差既是该时刻该通道上的车辆数,也是该通道等待通行的车辆数,此数据是控制该路口交通灯通行时间的依据。

图2 超声计数模块架设平面上示意图
2.2、超声计数模块
超声波测距是通过超声脉冲回波渡越时间法来实现的。设超声波脉冲由传感器发出,经障碍物反射,到回波的接收所历经的总时间为t,超声波在空气中的传播速度为v,则从传感器到目标物体的距离D可用下
式求出:
D=t×v/2 (1)
超声测距系统的原理框图如图3所示。

图3 超声测距系统的原理框图
2.2.2、超声计数原理
超声计数是超声测距技术的深化应用。超声测距模块架设在车道的上方,设无车时测得的距离是模块到地面的距离D1,有车时测得的距离是模块到车顶的距离D2,前后两次测得的距离差为ΔD。当车辆驶入超声模块的测量范围时,超声模块首先测得距离D1,下一周期测得距离D2,前后两次测得的距离差为ΔD=D2-D1<0;当无车通过、车辆通过的过程中距离没有任何变化ΔD=0;当车辆驶离超声模块的测量范围时,超声模块首先测得距离D2,下一周期测得距离D2,前后两次测得的距离差为ΔD=D1-D2>0。故每检测到一次ΔD<0,代表一辆车通过超声模块下方,从而实现对车辆的计数。超声计数原理如图4所示。

图4 超声计数原理
2.2.3、超声计数模块选择
本系统选择HC-SR04超声波测距模块来实现超声测距,该模块时序图如图5所示。模块回响电平的脉宽(高电平的时间)即测距渡越时间,测出脉宽并利用式(1)就能够实现对障碍物距离的测量。脉宽与距离之间存在线性关系,检测脉宽的改变,就能够实现对车辆的计数。

图5 HC-SR04超声波测距模块时序图
2.3、检测模块与MSP430的信号交互
由图5HC-SR04超声波测距模块时序图可知,HC-SR04与MSP430之间存在信号的交互:1个为超声模块触发信号,由MSP430输出到HC-SR04;另1个为回响电平,由HC-SR04输出到MSP430。实验测得的触发信号如图6所示,回响信号如图7所示(障碍物在2.1m处)。

图6触发信号

图7回响信号
由理论分析可知触发信号频率不能太高,否则会引起信号的混叠,导致误判;频率也不能太低,否则不能够实现对车辆的实时检测,故本系统选择触发频率为10Hz。
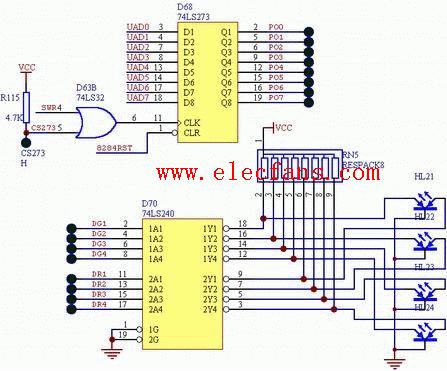
利用MSP430中TimerA、TimerB的捕获功能可以实现对回响脉冲的精确计时,进而通过内部程序算法实现对车辆的计数[7-8]。为了节省MSP430内部的定时器资源,将超声模块组1四个路口的回响信号分时[9]的输入到MSP430中。检测模块电路图如图8所示。

图8 检测模块电路图
2.4、误差分析
2.4.1、测距误差
本系统是以室温(15℃)时的声速(340m/s)计算距离的,而实际环境中的声速是随机量,有如下计算公式:
v=331.3+0.606c(2)
c为摄氏气温。根据式(2)知:
声速误差
Δv=(c-15)×0.606
有测距误差
ΔD=TΔv(3)
测距误差会引起车辆的误判,最终导致系统错误的分配时间。
为了消除此误差,系统不以某个固定的脉宽(对应某个固定的距离)为车辆判据,而以脉宽的显著变化为车辆的判据,由于温度相对测距时间是一个慢变量,在一辆车通过的时间内(1s)认为不变,此种处理方式可消除声速误差。
2.4.2、车辆的混道行驶误差
另一个会引起误差的因素是车辆的混道行驶。一种情况是右转的车辆通过模块2下方,使计数增加;一种情况是左转或者右转的车辆通过右转车道进入模块2和模块1之间的范围,使计数减少。但因其发生的概率很小,两种情况有互补作用,且少量的计数不准确不会对车辆的通车时间的设定产生很大的影响,因此可以忽略不计。
综上所述,系统的误差在允许范围内,不会对系统的功能产生很大的影响,系统可以达到智能调控交通灯的目的。
3、红外遥控模块电路设计
红外遥控模块核心部分是数据的编码发射和解码接收,本系统采用PT2262和PT2272[10-11]红外发射接收芯片来实现上述功能。电路图如图9、图10所示。


4、交通灯驱动电路设计
交通灯组是大功率器件,不能直接由单片机驱动。系统利用继电器实现弱电控制强电,交通灯驱动电路如图11所示。

图11 交通灯驱动电路
5、系统软件设计
本系统的主控制程序由两部分组成:车流量智能处理模块和人工手动处理模块。主程序流程图如图12所示。

图12 主程序流程图
车流量智能处理模块:
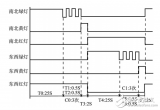
程序分时对各个路口进行循环控制,下面以东向行驶车道为例说明,程序逻辑图见图13。

图13 东向行驶逻辑
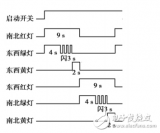
首先根据存留车辆数预置初始时间,单个车道时间控制表见表1。此处假设已检测到东向车道存留车辆数为25,系统设置初始时间为15s。东向绿灯亮了15s后,东向超声模块组1开始检测路口通行状态。若检测时间未达到5s,模块组1在连续的0.5s内没有检测到车辆通过并且其他路口有车辆等待,东向即亮黄灯3s,转向对下一个路口的控制;若检测时间已达到5s,无论东向是否仍有车辆通过,东向也直接亮黄灯3s,转向下一个路口的控制。这样就可以减少无车车道的多余通行时间,缩短其余车道上车辆的等待时间,提高通行效率。
表1 单个车道时间控制表

人工手动处理模块:当某个路口的车辆大于设定的限定值50时,说明此路口已经进入严重拥堵的状态,此时需要由交警进行手动控制。通过手动控制硬件模块,人工协调各个路口的通车时间,以确保拥堵交通下的道路行驶安全。
6、结语
以车流量检测为基础的智能交通灯控制系统,在道路设施一定、车流辆一定的情况下,对解决城市交通问题、提高道路利用率、提升交通自动化水平和管理水平具有一定的意义。本设计投资少、制作简单、安装方便、硬件稳定可靠、功能实用,具有实际推广应用价值。












 工商网监
工商网监
评论