 电子发烧友App
电子发烧友App


1.功能
本设计为一种温控风扇系统,具有灵敏的温度感测和显示功能,系统选用STC89C52单片机作为控制平台对风扇转速进行控制。可在测得温度值在高低温度之间时打开风扇弱风档,当温度升高超过所设定的温度时自动切换到大风档,当温度小于所设定的温度时自动关闭风扇,控制状态随外界温度而定。
2.硬件设计
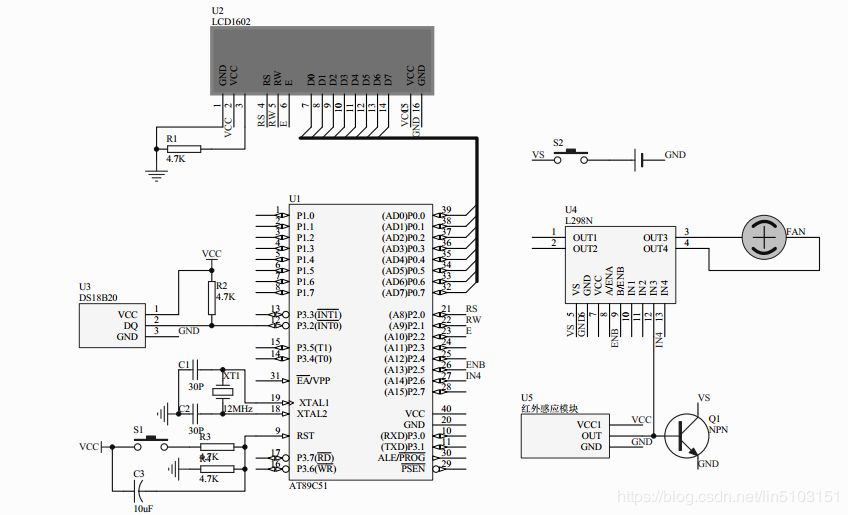
硬件电路主要由:
1.单片机最小系统
2.风扇驱动电路
3.LCD1602显示屏电路
4.DS18B20温度采集电路
3.程序设计
(1)LCD1602驱动程序
#define LCD1602_DB P0
sbit LCD1602_RS = P2^0;
sbit LCD1602_RW = P2^1;
sbit LCD1602_E = P2^2;
/* 等待液晶准备好 */
{
unsigned char sta; LCD1602_DB = 0xFF; LCD1602_RS = 0; LCD1602_RW = 1; do { LCD1602_E = 1; sta = LCD1602_DB; //读取状态字 LCD1602_E = 0; } while (sta & 0x80); //bit7等于1表示液晶正忙,重复检测直到其等于0为止}
/* 向LCD1602液晶写入一字节命令,cmd-待写入命令值 */
void LcdWriteCmd(unsigned char cmd)
{
LcdWaitReady(); LCD1602_RS = 0; LCD1602_RW = 0; LCD1602_DB = cmd; LCD1602_E = 1; LCD1602_E = 0;}
/* 向LCD1602液晶写入一字节数据,dat-待写入数据值 */
void LcdWriteDat(unsigned char dat)
{
LcdWaitReady(); LCD1602_RS = 1; LCD1602_RW = 0; LCD1602_DB = dat; LCD1602_E = 1; LCD1602_E = 0;}
/* 设置显示RAM起始地址,亦即光标位置,(x,y)-对应屏幕上的字符坐标 */
void LcdSetCursor(unsigned char x, unsigned char y)
{
unsigned char addr; if (y == 0) //由输入的屏幕坐标计算显示RAM的地址 addr = 0x00 + x; //第一行字符地址从0x00起始 else addr = 0x40 + x; //第二行字符地址从0x40起始 LcdWriteCmd(addr | 0x80); //设置RAM地址}
/* 在液晶上显示字符串,(x,y)-对应屏幕上的起始坐标,str-字符串指针 */
void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str)
{
LcdSetCursor(x, y); //设置起始地址 while (*str != '�') //连续写入字符串数据,直到检测到结束符 { LcdWriteDat(*str++); }}
/* 初始化1602液晶 */
void InitLcd1602()
{
LcdWriteCmd(0x38); //16*2显示,5*7点阵,8位数据接口 LcdWriteCmd(0x0C); //显示器开,光标关闭 LcdWriteCmd(0x06); //文字不动,地址自动+1 LcdWriteCmd(0x01); //清屏}
(2)DS18B20驱动程序
sbit IO_18B20=P3^2;
/软件延时函数,延时时间(t10)us*/
void DelayX10us(unsigned char t)
{
do{
_nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_();}while(--t);
}
/ 复位总线,获取存在脉冲,以启动一次读写操作 /
bit Get18B20Ack()
{
bit ack;
EA=0; //禁止总中断
IO_18B20=0; //产生500us复位脉冲
DelayX10us(50);
IO_18B20=1;
DelayX10us(6); //延时60us
ack=IO_18B20; //读取存在脉冲
while(!IO_18B20); //等待存在脉冲结束
EA=1; //重新使能总中断
return ack;
}
/ 向DS18B20写入一个字节,dat-待写入字节 /
void Write18B20(unsigned char dat)
{
unsigned char mask;
EA=0;
for(mask=0x01;mask!=0;mask<<=1)//低位在先,依次移出8个bit
{
IO_18B20=0;//产生2us低电平脉冲 _nop_(); _nop_(); if((mask&dat)==0)//输出该bit值 IO_18B20=0; else IO_18B20=1; DelayX10us(6);//延时60us IO_18B20=1;//拉高通信引脚}
EA=1;
}
/ 从DS18B20读取一个字节,返回值-读到的字节 /
unsigned char Read18B20()
{
unsigned char dat;
unsigned char mask;
EA=0;
for(mask=0x01;mask!=0;mask<<=1)//低位在先,依次采集8个bit
{
IO_18B20=0;//产生2us低电平脉冲 _nop_(); _nop_(); IO_18B20=1;//结束低电平脉冲,等待18B20输出数据 _nop_(); //延时2us _nop_(); if(!IO_18B20)//读取通信引脚上的值 dat &= ~mask; else dat |= mask; DelayX10us(6);//再延时60us}
EA=1;
return dat;
}
/ 启动一次18B20温度转换,返回值-表示是否启动成功 /
bit Start18B20()
{
bit ack;
ack=Get18B20Ack();//执行总线复位,并获取18B20应答
if(ack==0)
{
Write18B20(0xCC); Write18B20(0x44);}
return ~ack;
}
/ 读取DS18B20转换的温度值,返回值-表示是否读取成功 /
bit Get18B20Temp(int *temp)
{
bit ack;
unsigned char LSB,MSB;//16bit温度值的低字节和高字节
ack=Get18B20Ack();//执行总线复位,并获取18B20应答
if(ack==0)
{
Write18B20(0xCC);//跳过ROM操作 Write18B20(0xBE);//发送读命令 LSB=Read18B20();//读温度值的低字节 MSB=Read18B20();//读温度值的高字节 *temp=((int)MSB< < 8)+LSB;//合成为16bit整型数}
return ~ack;
}
(3)主程序
sbit IN1=P2^7;
sbit IN2=P2^6;
sbit ENA=P2^5;
bit flag1s=0;//1s定时标志
unsigned char T0RH=0;
unsigned char T0RL=0;
int temp;//读取到的当前温度值
unsigned char len;
int intT,decT;//温度值的整数和小数部分
unsigned char str[12];
void Compare();
void GetTemp();
void ConfigTimer0(unsigned int ms);
unsigned char IntToString(unsigned char *str,int dat);
extern bit Start18B20();
extern bit Get18B20Temp(int *temp);
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str);
void main()
{
bit res;
EA=1;
ConfigTimer0(10);//T0定时10ms
Start18B20();//启动DS18B20
InitLcd1602();//初始化液晶
while(1)
{
if(flag1s)//每秒更新一次温度 { flag1s=0; res=Get18B20Temp(&temp);//读取当前温度 if(res)//读取成功时,刷新当前温度显示 { GetTemp(); LcdShowStr(0,0,"Welcome to use");//显示字符及温度值 LcdShowStr(0,1,"Current T:"); LcdShowStr(10,1,str); Compare(); } else //读取失败时,提示错误信息 { LcdShowStr(0,0,"error!"); } Start18B20();//重新启动下一次转换 }}
}
/ 温度获取函数,获取当前环境温度值并保存在str数组中 /
void GetTemp()
{
intT=temp>>4;//分离出温度值整数部分
decT=temp &0x0F;//分离出温度值小数部分
len=IntToString(str,intT);//整数部分转换成字符串
str[len++]='.';
decT=(decT*10)/16;//二进制的小数部分转换为1位十进制位
str[len++]=decT+'0';//十进制小数位再转换为ASCII字符
while(len<6)//用空格补齐到6个字符长度
{
str[len++]=' ';}
str[len++]='�';
}
/ 延时函数,用于PWM控制 /
void delay(unsigned int z)
{
unsigned int x,y;
for(x=z;x>0;x--)
for(y=110;y >0;y--);}
/ 比较函数,通过温度值的比较设置电机的转速 /
void Compare()
{
unsigned int i=0;
unsigned char j;
if((intT>= 24) && (intT<26)) //以两度为一个温差范围,并设温度范围索引
{
j=0;}
else if((intT>=26) &&(intT<28))
{
j=1;}
else if((intT>=28) &&(intT<30))
{
j=2;}
else if(intT>=30)
{
j=3;}
switch(j) //根据温度索引设置电机转速
{
case 0: IN1=1; IN2=0; for(i=0;i< 200;i++) { ENA=1; delay(20); ENA=0; delay(30); } break; case 1: IN1=1; IN2=0; for(i=0;i< 200;i++) { ENA=1; delay(30); ENA=0; delay(30); } break; case 2: IN1=1; IN2=0; for(i=0;i< 200;i++) { ENA=1; delay(55); ENA=0; delay(30); } break; case 3: IN1=1; IN2=0; ENA=1; break; default:break;}
}
/ 整型数转换为字符串,str-字符串指针,dat-待转换数,返回值-字符串长度 /
unsigned char IntToString(unsigned char *str,int dat)
{
signed char i=0;
unsigned char len=0;
unsigned char buf[6];
if(dat<0)//如果为负数,首先取绝对值,并在指针上添加负号
{
dat=-dat; *str++='-'; len++;}
do{ //先转换为低位在前的十进制数组
buf[i++]=dat%10; dat /=10;}while(dat>0);
len += i;//i最后的值就是有效字符的个数
while(i-->0)//将数组值转换为ASCII码反向拷贝到接收指针上
{
*str++=buf[i]+'0';}
*str='�';
return len;
}
void ConfigTimer0(unsigned int ms)
{
unsigned long tmp;
tmp=11059200/12;
tmp=(tmp*ms)/1000;
tmp=65536-tmp;
tmp=tmp+12;
T0RH=(unsigned char)(tmp>>8);
T0RL=(unsigned char)tmp;
TMOD &= 0xF0;
TMOD |= 0x01;
TH0=T0RH;
TL0=T0RL;
ET0=1;
TR0=1;
}
void InterruptTimer0() interrupt 1
{
static unsigned char tmr1s=0;
TH0=T0RH;
TL0=T0RL;
tmr1s++;
if(tmr1s>=100)
{
tmr1s=0; flag1s=1;}
}










 工商网监
工商网监
评论