 电子发烧友App
电子发烧友App


摘要:随着电子技术的发展,电动助力转向系统(Electric Power Steering,EPS)作为传统液压助力转向系统(Hydraul ic Power Steering,HPS)和电动液压助力转向系统(Electro-Hydraul ic PowerSteering,EHPS)技术的替代者,其应用愈来愈广泛。本文通过分析EPS的基本原理。市场以及技术优势,结合英飞凌.TI.飞思卡尔等半导体厂商的EPS方案研发现状,给出基于ADI BF506F的EPS方案和技术评估。
1 背景
电动助力转向系统(EPS)是未来转向系统的发展方向,该系统由助力电机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵。软管。液压轴。传送带和皮带轮,既节省能量,又保护环境,逐渐成为轿车的标准装置。根据咨询公司Strategy Analyties对中国EPS市场的预测,在2010~2017年期间中国的EPS市场的年复合增长率将达到16.9%,约1800万套。
EPS市场之所以能有如此的增长趋势,也是由其本身具有的诸多优点所决定的,这主要表现在:
(1)EPS能在各种行驶工况下提供最佳助力,减小扰动,改善汽车的转向特性,提高汽车高速行驶时的转向稳定性,进而提高汽车的主动安全性。
(2)EPS只在转向时电机才提供助力,因而能减少燃料消耗。统计数字表明,与HPS相比,EPS每百公里可节油约0.3至0.5升。
(3)EPS电机由蓄电池供电,因此即使在发动机熄火或出现故障时也能提供助力。
(4)EPS取消了液压结构,其零件比HPS大为减少,因而重量更轻。结构更紧凑,易于设计和安装,并能降低噪声。
(5)EPS易于调整和检测,可以通过设置不同的程序,快速与不同车型匹配,因而能缩短生产和开发周期。
(6)EPS不存在渗油问题,可大大降低保修成本,减小对环境的污染,改善了环保性。
(7)EPS比HPS具有更好的低温工作性能。
(8)可实现自动泊车系统等辅助功能。
2 EPS
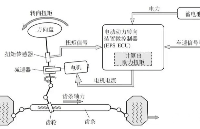
EPS是通过电机的动力直接给转向系统提供辅助扭矩的系统。它依靠检测发动机。方向盘。车速等信息来判断并提供合适的转向助力,使得转向过程能够精确。轻松。安全地完成。通常一个EPS系统主要由转向部件。传感器。电机。减速机构和电子控制单元(ECU)等组成,其系统构成由图1所示。

转向部件将方向盘。扭杆。转矩传感器。助力电机减速器总成及转向传动轴组合到一起,形成一个整体,完成转向功能。控制器ECU由微处理器及电子模块组成,完成对来自转矩传感器。点火开关。发动机转速传感器。车速传感器的信号的处理,并按照一定的运算判断规律控制助力电机,使之产生合理的转向助力转矩。
当驾驶员操作方向盘时,连接方向盘的扭杆产生形变,其形变角度与施加到方向盘的转矩成正比,转矩传感器将扭杆形变的角度转化成线性的电压输出信号T,此信号与车速信号V.发动机转速信号w.点火信号G送入到控制器ECLT进行综合。分析。判断和运算后输出电流信号控制助力电机。助力电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作,系统逻辑图如图2所示。

3技术方案
为了汽车转向的过程顺利实现,EPS系统需要实现以下功能:
助力控制:在汽车停车及低速行驶时提供较大辅助力矩,使转向过程快捷轻便地进行,而在汽车高速行驶时提供较小的辅助力矩以保持转向过程的可靠与沉稳。
回正控制:确保汽车从直行状态到大角度转向的过程中回正力矩相应地逐渐提高。另外,确保汽车在非转向状态下的直线行驶性能,并防止汽车在不同车速下实现回正时出现回正不足或回正超调的现象。
阻尼控制:利用电机感应电动势来减弱汽车高速行驶时出现的方向盘抖动现象,消除转向轮因路面不平而引起的方向盘摆振,并在汽车高速行驶时,给转向过程增加一定的阻尼,克服转向发飘的感觉。
分析诊断功能:应能实时监控运行状态,并具有故障报警和提示功能,在故障不能自动排除时关断EPS使车辆进入传统的机械转向模式。
通讯功能:应具有通过CAN或LIN总线与其他系统进行通讯的能力,并具有可以更改主要参数(主要针对电机控制)的接口。
为实现上述功能,整个EPS系统必须高效快速地协同工作,因此,系统的下列组成部分的性能显得尤为重要:
传感器:传感器给EPS系统提供了汽车行驶状况的各种必要信息,是系统的感觉器官,其信号输出应该尽量准确。高速。简洁.EPS系统通常需要方向盘扭矩传感器。转角传感器(可选)和轮速传感器的信号。目前通用的传感器采用模拟信号处理方式,信号输出精度不高且输出的信号需要ECU进一步处理,增加了ECU的工作负担,而数字信号传感器因其可给出ECU直接可用的数字信号,减少了占用的ECU资源,并提高了信号的准确性而被越来越多的EPS系统采用。
控制策略:传统的转向系统主要为驾驶员提供转向助力,减轻转向负担,EPS系统还要解决诸如高速行驶过程中转向过大。回正等影响车辆稳定性和安全|生的问题,因而需要一套高效完善的控制策略来保证其性能。
半导体技术的高速发展,使得EPS从成本和技术上成为可能。英飞凌.TI,以及飞思卡尔相继推出基于自身微控制器/处理器的EPS方案。
3.1英飞凌的EPS方案
英飞凌的EPS采用XC2336B和XC836MT的双处理器方案,如图3所示.XC2336B通过对扭矩传感器。发动机点火信号等信息的采集。处理,以相应的控制策略驱动3相电机实现电助力转向。

XC836MT为辅助处理器,实现安全控制。
XC2336B是一个带五级流水线的最高80MHz时钟频率的高性能CPU并拥有一个保护数据不被非法访问的存储器保护单元(Memor)r ProtectionUnit,MPU)。它具有不同类型的片上存储模块(8kstand-by RAM,2k dual-port RAM,最高16k dataSRAM,最高16k program/data SRAM和最高320kprogram flash memory),并使用硬件CRC检测和ECC码来发现数据错误并能纠正单位错误。它的众多外设模块可灵活地满足各种不同的需求,拥有2个可扩展为9路的 10位分辨率的同步A/D转换器.16路通用捕捉/比较单元。两路带PWM产生器的捕捉/比较单元.5个定时器.40路通用I/O接口。多路CAN接口等等,并可通过DAP和JTAG接口进行片上调试。此外,它还带有看门狗和晶振看门狗来保证控制器的正常运行。
XC836MT是一颗具有8051内核的微控制器,作为备份微控制器,它最主要的作用是对主微控制器进行监控并在主微控制器失效的情况下切断EPS使汽车进入机械转向状态,避免汽车失控而引发危险。
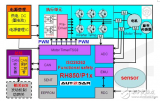
3.2 TI的EPS方案
TI公司的C2000系列DSP,如低端的TMS320F28016.高端的 TMS320F28335均有相应的EPS方案。以TMS320F28016为例,其集成CAN通信接口,片上集成32K字节FLASH存储器,12K字节SRAM,2K字节OTP ROM,60MHz内部总线频率,16通道12位模数转换器(ADC),转换时间可达267ns;正交编码脉冲(QEP)接口。定时器捕获比较功能以及 16路独立的脉宽调制(PWM)输出通道,可以方便实现完整的系统集成控制功能,并提供看门狗电路。电源监视等。
与TMS320F28016相比,TMS320F2812主频提高到150MHz,TMS320F28335增加了浮点运算单元.TI的EPS方案如图4所示。

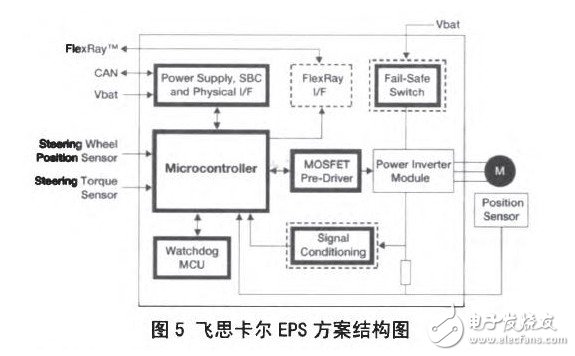
3.3飞思卡尔的EPS方案
飞思卡尔的EPS方案以MPC560xP和MPC564xL作为核心处理器,其中MPC560xP 为单核,主频可达64MHz的32位处理器,高达512KB的片上FLASH和40KB的片上RAM,拥有CAN.LIN总线等接口,2个10bitl5 通道的ADC,8路独立的PWM等外设资源.MPC564xL为双核处理器,主频高达120MHz,1MB片上FLASH以及128KB片上RAM,2个 PWM单元,每个单元4路,以及3路6通道通用定时器,拥有2个LIN和CAN,两个12bitADC,各16通道。其EPS方案结构图如图5所示。
3.4方案比较
如果仅从EPS功能实现上考虑,控制策略采用传统PID控制,上述方案均能满足要求,且英飞凌的(XC2336B+XC836MT)方案。,rI的TMS320一F28016方案以及飞思卡尔的MPC560xP方案均能实现低成本。
然而,由于实际中EPS往往具有非线性。时变不确定性,使得传统的PID不能达到理想的效果,以致对实际运行工况的适应性很差,因此,需要采用较为高级的控制策略,如模糊控制,以使系统具有较强的鲁棒性,在提高系统的操纵轻便性的同时,能保证驾驶员获得充分的路感,从而获得较为理想的助力特性。
复杂的控制策略意味着复杂的算法和运算负荷,这就需要较高性能的处理器,如TI公司的TMS320F28335.飞思卡尔公司的MPC564xL,尤其是ADI公司的BF506F等。
4 AD I DSP BF506F的优势
ADI DSP BF506F是一个400MHz主频的低功耗处理器,片上4MB FLASH,双12位,2MSPS,12通道高速ADC,拥有CAN.UART通信接口,6对PWM输出。值得强调的一点是,12位的标称值,可以达到 11.5位的ENOB,这个在业界是非常领先的。
与TMS320F28335.MPC564xL相比,BF506F主频更高。片上FLASH更大.ADC数量精度高,更重要的一点是,BF506F具有更高的性价比。
ADI BF506F EPS电控板如图6所示。
5结论
在外设资源相差不大,高主频意味着比较高的运算处理能力,因此,选择BF506F系列处理器实现EPS,在硬件平台不用变更的情况下,更容易实现算法。控制策略升级。
ADI BF506F EPS演示平台如图7所示。













 工商网监
工商网监
评论