我们为了实现动态图像的滤波算法,用串口发送图像数据到FPGA开发板,经FPGA进行图像处理算法后,动态显示到VGA显示屏上,前面我们把硬件平台已经搭建完成了,后面我们将利用这个硬件基础平台
2019-01-02 16:26:23 4706
4706 10种滤波算法
2017-07-28 11:16:48
包含内容:1.10种软件滤波的方法 2.单片机数字滤波算法研究3.滤波算法程序
2017-10-13 09:29:02
computation)。源于对鸟群捕食的行为研究。粒子群优化算法的基本思想:是通过群体中个体之间的协作和信息共享来寻找最优解.PSO的优势:在于简单容易实现并且没有许多参数的调节。目前已被广泛应用于函数优化
2021-07-07 06:04:36
本帖最后由 shkslc 于 2013-10-10 10:25 编辑
跟踪算法简介AVT21提供了多种跟踪算法:质心跟踪算法(Centroid)、多目标跟踪算法(MTT)、相关跟踪算法
2013-09-29 08:59:37
,并具有良好的普适性。因此,AVT31不是单纯的视频目标取差器,而是一个完整的自动视频跟踪系统解决方案。内置多种图像增强预处理算法:白热、黑热、双极性、移动目标检测等。视频捕获:可根据目标的亮度、尺寸
2013-09-05 11:14:16
采集数据中的量化噪声,在进行数据压缩前采用滤波的预处理技术。介绍LZW算法和滑动滤波算法的基本理论,详细阐述用单片FPGA实现两种算法的方法。最终测试结果表明,该设计方案能够有效滤除数据中的高频噪声
2010-04-24 09:05:21
三方面的视频;2、就是图像视频处理算法,包含目标检测跟踪算法、图像增强、透雾、拼接、电子稳像等算法的程序实现优化工作。3、做出一个可视化界面,在界面上操作这些算法,观看这些算法的效果。4、做出产品,将算法放到嵌入式系统中,使得这个嵌入式系统具有我们想要的功能,比如目标跟踪功能。
2016-01-18 16:23:54
迭代实现跟踪,以及加入放射变换,目标预测,焦点提取功能,以适应更为复杂的环境来跟踪。后期在PC上调试好,还需在DSP上调试好,具体优化要求还要根据视频源来定。努力做到最优。
2015-09-09 16:59:45
是测试其提供的例程b.将目标跟踪算法移植到计算棒中,主要是量化等的工作c.将计算棒接入到目前的RK3399的平台事项PTZ相机的控制,最终实现视频会议中目标跟踪算法
2020-06-30 15:50:16
概率密度的逼近程度来缓解样本退化问题,通过改进再采样实现过程来缓解样本枯竭问题.把新算法应用到INS/GPS组合导航系统中,仿真结果表明新算法的估计性能明显优于粒子滤波【关键词】:粒子滤波;;最大期望算法
2010-04-24 09:04:09
随着基于模型设计的广泛应用,模型在环仿真也逐渐多了起来,我们今天介绍几种嵌入式常用滤波算法的matlab实现。一、采用数字滤波算法克服随机干扰的误差具有以下优点:数字滤波无需其他的硬件成本,只用一个
2021-12-21 08:32:58
卡尔曼滤波算法对比其他的滤波算法有什么优点
2023-10-11 06:42:24
卡尔曼滤波算法是怎么实现对数据的预测处理的
2023-10-10 08:28:02
阶段步长调整过程中的不足,实现了对SVS-LMS算法的改进。理论分析和计算机仿真结果表明,本算法的收敛性能优于SVS-LMS算法。另外,还对本算法与VS-LMS算法进行了比较,仿真结果表明本算法在低
2010-04-26 16:12:54
和大小,得到当前帧中目标的尺寸和质心位置。在介绍Intel公司的开源OpenCV计算机视觉库的基础上,采用CAMSHIFT跟踪算法,实现运动目标跟踪,解决了跟踪目标发生存在旋转或部分遮挡等复杂情况下的跟踪
2014-12-23 14:21:51
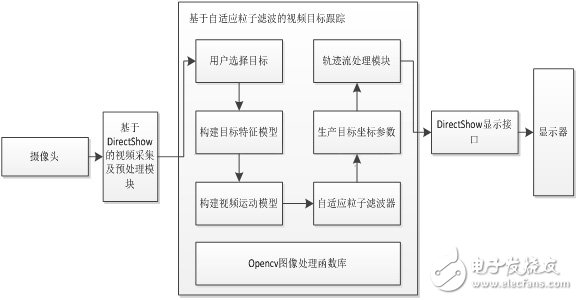
目标跟踪的处理要求。后续的本博客的第二个部分《QT+OpenCv实现在410c开发板上实现视频目标追踪预研——(二)粒子滤波算法测试》将在此基础上,进一步在上位机平台上搭建粒子滤波视频目标跟踪系统对粒子滤波算法性能进行测试,进一步验证其在DragonBoard 410c平台上实现的可行性。
2018-09-21 10:42:31
自适应滤波器设计是典型的多参数组合优化问题,利用一种改进的粒子群优化算法(MPSO)来优化设计自适应LMS滤波器.将滤波器设计问题转化为滤波器参数优化的问题,利用改进的粒子群算法MPSO搜索整个参数
2010-04-26 16:13:08
1、引言 随着现代高速处理器的迅猛发展,图像处理技术也日益成熟。其中,移动目标的视频检测与跟踪是图像处理、分析应用的一个重要领域,是当前相关领域的研究前沿。移动目标视频检测与跟踪技术,在机器人
2019-06-26 06:09:46
` 本帖最后由 ninghechuan 于 2017-9-1 07:04 编辑
在这一篇开篇之前,我需要解决一个问题,上一篇我们实现了基于FPGA的均值滤波算法的实现,最后的显示效果图上发现有
2017-09-01 07:04:36
` 本帖最后由 ninghechuan 于 2017-8-30 08:20 编辑
我们为了实现动态图像的滤波算法,用串口发送图像数据到FPGA开发板,经FPGA进行图像处理算法后,动态显示到
2017-08-28 11:34:10
目标跟踪算法的研究,并加入噪声干扰,更接近真实的军事与民用环境。首先搭建红外/雷达双模导引头仿真平台,进而设计基于多传感器的多模型机动目标跟踪算法,采用扩展卡尔曼滤波,最终实现算法的软件仿真及跟踪性能
2018-12-05 15:16:23
作者:Joy Yang1.什么是姿态融合算法简单来说,姿态融合算法就是融合多种运动传感器数据(一般需要3轴加速度, 3轴陀螺仪或者3轴地磁感应传感器),通过数字滤波算法容错补偿,实现当前姿态检测
2019-07-19 06:47:49
对ADC数据进行滤波可以用中值滤波算法吗
2023-10-09 06:29:24
前言大家好,我是小麦在往期的文章中,曾经介绍过PWM,SPWM,还有SVPWM的实现,另外还有PID输入输出的时间响应;对不同滤波算法的测试,这些如果只通过单纯的数据就变得十分的不直观;这...
2021-11-30 07:43:06
常用的经典滤波算法有哪些??
2012-07-01 15:15:23
怎么评估一个滤波算法的滤波效果
2023-10-10 07:31:46
分布式的滤波器算法是什么?一种基于FPGA分布式算法的滤波器设计实现
2021-04-29 07:13:23
软件算法实现数字滤波问题:解决方法:数字滤波算法优点:限幅滤波算法:原理描述:适用场景:参考代码:中值滤波算法:原理描述:适用场景:参考代码:算术平均滤波算法:原理描述:适用场景:参考代码:加权平均
2022-01-20 06:58:14
单片机主要作用是控制外围的器件,并实现一定的通信和数据处理。但在某些特定场合,不可避免地要用到数学运算,尽管单片机并不擅长实现算法和进行复杂的运算。下面主要是介绍如何用单片机实现数字滤波。在单片机
2022-01-18 07:00:34
针对视频运动参数捕获系统中标记点无法被正确匹配及跟踪的问题,提出一种多目标三维立体跟踪算法。该算法通过二维和三维卡尔曼滤波预测来标记点的位置,并利用三维立体匹
2009-04-08 09:00:55 21
21 为提高含噪视频序列的质量和效果,提出一种基于开关噪声检测与三维中值滤波相结合的开关3-D中值滤波算法。该算法通过判断视频序列的每一个像素点,对噪声点用3-D中值滤波处
2009-04-23 09:32:5617 粒子滤波技术通过非参数化的蒙特卡罗模拟方法实现递推贝叶斯滤波,适用于非线性目标运动模型、非高斯噪声的目标跟踪。在实际应用中,初始粒子选取的精度对滤波效果往往
2009-06-16 11:36:3313 在实际系统中,常用的数据融合方法是基于扩展的卡尔曼滤波算法的融合算法,但是这种融合算法的跟踪精度并不是很高. 通过对滤波跟踪型数据融合的研究,提出了基于转换测量值卡尔
2009-07-14 11:28:0015 一种基于粒子滤波的自适应相关跟踪算法:相关跟踪是最常见的一种目标跟踪方法,但传统相关跟踪采取的“峰值”跟踪方法抛弃了所有小于峰值点相关值的位置点的信息,不够稳健,受
2009-11-08 16:44:0635 针对被动传感器阵列中的机动目标跟踪问题,该文提出了一种基于多模Rao-Blackwellized 粒子滤波的机动目标跟踪新方法。算法首先基于Rao-Blackwellization 理论将机动目标跟踪问题划分为
2009-11-20 15:24:4611 该文提出一种自适应粒子滤波算法。首先建立目标的颜色模型,提出基于加权颜色分布图的目标颜色模型。采用该模型计算目标模板与粒子区域的相似程度,以此作为对目标物体定
2009-11-24 15:46:1615 针对粒子滤波运算量大,硬件复杂性高的问题,该文提出了一种用于纯方位跟踪的简化粒子滤波算法,该算法引入了一种新的基于阈值的重采样方法,降低了硬件实现的复杂度。在
2009-11-25 15:15:439 非线性估计领域的经典算法是扩展Kalman滤波(EKF),它采用了Taylor展开的线性变换来近似非线性模型,因而存在计算量大、实时性差、估计精度低等缺点。而粒子滤波采用一些带有
2010-01-18 11:42:1428 仅用单一的颜色特征进行跟踪是大多数跟踪算法鲁棒性不高的主要原因。针对此问题,该文提出一种多特征融合跟踪算法。该算法利用颜色和纹理特征表示目标,通过均值迁移和粒
2010-02-09 11:39:3719 介绍了3种最基本非线性滤波算法——扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和粒子滤波(PF)算法的理论在机动目标跟踪中的应用。通过仿真试验对三者性能进行了分析比较。
2010-07-08 15:34:5616 设计内容:1.了解视频图像动态跟踪的应用背景2.了解视频图像动态跟踪算法的基本原理3.掌握camshift和Meanshift跟踪算法的基本原理4.编程实现camshift算法并进行实验验证
2010-11-16 01:03:4742 本文采用的图像是256×256大小的灰度图像,滤波模板3×3大小。如何设计硬件电路来完成上述空域滤波算法,分析上述算法实现过程,可以得出结论,实现空域滤波算法可采用3个三阶的FIR滤波器+延时单元来描述。
2011-01-18 12:12:47837 
随着目标运动的多样性和复杂化,雷达非线性目标跟踪算法越来越受到重视。本文对目前 非线性滤波 的主要算法即扩展卡尔曼滤波、不敏卡尔曼滤波、粒子滤波的滤波模型、适用条件
2011-07-11 10:55:1162 针对粒子滤波(Particle filter)算法的粒子衰退和计算量过大问题,提出一种将P-N跟踪器与粒子滤波算法结合的目标跟踪方法。首先构造P-N跟踪器,利用跟踪器来确定目标区域范围并输
2011-09-19 15:33:570 CAMSHIFT算法是一种基于颜色直方图的目标跟踪算法。在视频跟踪过程中,CAMSHIFT算法利用选定目标的颜色直方图模型得到每帧图像的颜色投影图,并根据上一帧跟踪的结果自适应调整搜索
2011-11-07 14:47:55923 建立了双观测站被动跟踪系统的非线性滤波模型,通过扩展卡尔曼滤波方法在该非线性模型下的具体实现步骤。分析了目标通过不同角度向观测站袭来时,卡尔曼滤波算法对目标参数估计的
2012-04-18 15:32:3450 利用粒子滤波实现行人跟踪是视频智能监控的主要方法之一,但粒子滤波的粒子退化问题尚未得到一个比较理想的解决方法。本文利用重采样后的粒子集,构造经验分布函数,用支持向
2013-08-20 16:57:020 为了解决再入阶段的弹道目标跟踪问题,提出一种修正的强跟踪滤波算法,即强跟踪有限差分滤波算法(STFDEKF)。修正的强跟踪算法做出来以下改进:使用有限差分方法来近似多项式,不需要求解非线性函数的导数;其次,新算法中使用强跟踪的次优渐消因子对先验协方差矩阵进行修正。
2015-12-21 10:00:1312 卡尔曼滤波算法C语言实现 可以运行STM32 和 arduino上 已测试成功
2016-09-27 16:34:1667 一种优化高斯粒子滤波的载波频偏估计算法_焦玲
2017-01-07 18:56:131 基于Kalman滤波器和改进Camshift算法的双眼跟踪_王丽
2017-01-07 19:00:391 基于重采样技术改进的粒子滤波算法_李小婷
2017-01-07 20:49:271 改进的粒子滤波单通道盲分离算法_马欢
2017-01-08 11:13:290 在QT+OpenCV实现在410c开发板上实现视频目标追踪预研系列内容呢的前面两个博客中已经对目标跟踪算法的选择进行了介绍,确定了使用粒子滤波作为视频目标跟踪,并在上位机上对粒子滤波算法进行了简单的测试验证了采用粒子滤波算法来实现目标跟踪的可行性。
2017-02-23 10:33:322887 目标跟踪算法作为一种有着非常广泛的应用的算法,在航空航天、智能交通、智能设备等领域有着非常广泛的应用。本系列博客将教大家在410c开发板上基于linux操作系统环境,采用QT+Opencv来实现视频
2017-02-27 10:32:475141 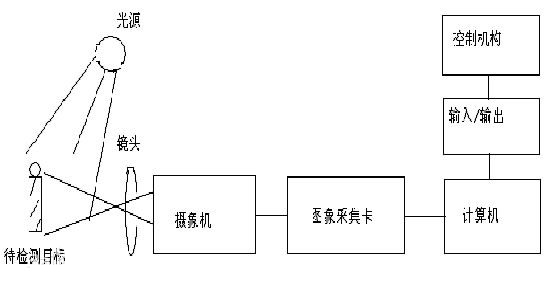
相控阵PD雷达目标检测的实时空间滤波算法_邓志象
2017-03-15 09:42:493 改进粒子滤波的无线传感器网络目标跟踪算法_丁婷婷
2017-03-19 19:04:390 基于核相关滤波器的目标旋转跟踪算法_李龙
2017-03-19 19:25:560 ) VECx技术以加速电路的计算性能,分析与评估硬件与软件对实现FIR滤波算法的影响。实验结果表明,采用硬件等效替代的方法能使单个FIR滤波能
2017-11-03 10:29:5210 特性,增加了样本的多样性,克服了重采样过程中的粒子退化问题,并针对二维平面机动模型进行仿真。仿真实验表明,本文算法能够适用于机载无源定位系统,能够有效的提高滤波精度,跟踪性能优于经典的粒子滤波算法。
2017-11-08 15:32:321 为了解决 Kalman滤波算法跟踪精度低,计算量大的问题,提出了光电跟踪目标的贯序滤波算法。该算法将 Kalman滤波原理拓展到对测量矢量按照俯仰、方位、距离的顺序逐个进行滤波处理。并将前一个测量
2017-11-10 16:36:003 -滤波算法是一种高效滤波算法,常用于对匀速直线运动的跟踪。为了解决船用ARPA雷达追踪定位实时性和准确性的矛盾,提出使用-滤波算法对目标航迹进行滤波。在确保精度要求的同时,能够快速定位目标,并计算
2017-11-14 11:43:343 中以先验概率密度函数作为建议分布所引发的退化问题;运用优化组合重采样策略保证所有粒子的信息以一定概率得到继承,维持粒子集中粒子的多样性。理论分析与仿真结果均表明,改进算法能有效地解决标准粒子滤波存在的粒子退化问题并避免
2017-11-17 17:42:4810 针对经过多次迭代之后粒子滤波因粒子匮乏,对于光照、遮挡与旋转等问题会出现跟踪精度下降,甚至失败等问题,提出了一种似然分布自适应调整ALD方法,根据噪声因子的大小来自适应调整似然分布状态,增加先验
2017-11-21 08:52:120 为解决相关滤波器(CF)在跟踪快速运动目标时存在跟踪失败的问题,提出一种结合了核相关滤波( KCF)跟踪器和基于光流法的检测器的长时核相关滤波(LKCF)跟踪算法。首先,使用跟踪器跟踪目标,并计算所
2017-12-05 08:44:400 针对粒子滤波中存在粒子质量低和粒子贫化的问题,提出了一种基于智能粒子滤波的多传感器信息融合算法。该算法分为两个模块,首先,将多传感器数据发送给相应的粒子滤波计算模块,以优化粒子分布为目的更新建议分布
2017-12-08 17:08:371 针对基于Cubature粒子滤波的蒙特卡罗定位(CMCL)算法存在的计算量大、实时处理能力较差的问题,提出一种基于自适应多提议分布粒子滤波的蒙特卡罗定位( AMPD-MCL)算法。该算法
2017-12-14 11:43:472 本课题的主要内容是在MATLAB上实现自适应滤波器的设计。课题的具体内容为利用GUI界面设计出滤波器的选择界面、参数的输入界面、结果分析图等。其中滤波器的设计将会用两种算法实现既LMS算法和RLS算法。
2017-12-14 16:24:4536801 
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
2017-12-19 15:35:316371 针对标准粒子群优化(PSO)算法在求解过程中存在求解精度低、搜索后期收敛速度慢等问题,提出一种基于粒子滤波重采样步骤与变异操作相结合的改进PSO算法-RSPSO。该算法充分利用重采样中具有较大
2017-12-20 16:20:510 对三维点云数据进行曲率估计,并对现有点云双边滤波进行改进,增强其鲁棒性和保特征性;最后使用改进的双边滤波对小尺度噪声进行光顺,实现三维点云数据模型的去噪、光顺。与单独使用双边滤波、Fleishman双边滤波相比,改进算法
2018-01-05 10:51:022 区域之间的对比度被作为目标评判双准则,而目标函数(或似然函数)则由两个准则的加权融合而成。算法是在粒子滤波框架下实现的目标搜索,并采用了模糊逻辑对相似度和对比度的权值进行自适应调节。对人、动物等多个挑战性运动
2018-01-08 10:39:200 视觉跟踪问题是当前计算机视觉领域中的热点问题,而在动态环境中对运动目标进行实时、鲁棒的跟踪是其重要的组成部分,视觉跟踪在自动监控、人机交互、医学图像处理、虚拟现实等领域有着广泛的应用。常用的用于目标
2018-01-25 11:49:373 针对航拍视频的特性,对经典的压缩跟踪( Compression tracking,CT)算法进行了研究,发现了CT算法在样本采集和分类取样步骤中的不足并进行了相应的改进。采用Kalman滤波器预测
2018-02-27 14:17:411 研究了一种基于多线索融合的目标跟踪算法并在TI DM3730上实现。该算法结合在线AdaBoost和颜色目标跟踪算法,选用Haar小波和核颜色直方图两种特征类型,利用粒子的状态散度矩阵的行列式
2018-03-05 16:36:121 关键词:DaVinci , SoC , 跟踪算法 , 视频 目标跟踪作为计算机视觉的一个极具挑战性的研究任务,已被广泛的应用在人机交互、智能监控、医学图像处理等领域中。目标跟踪的本质是在图像序列
2018-11-14 11:32:02248 提出了一种实用的图像滤波算法,即图像加窗中值滤波算法。在分析经典中值滤波算法基础上,给出了加窗中值滤波算法的基本原理与实现过程,与经典的邻域均值滤波器、中值滤波器、Buttenvorth低通滤波器、Wiener滤波器进行了滤波比较实验,分别从主观效果及客观参数计算两个方面验证了其优良的滤波性能。
2018-11-30 11:11:224 Mean Shift收敛性分析, 使用收敛后的粒子集表达目标的当前状态; 以状态粒子的坐标位置为特征值对其进行Mean Shift 聚类, 作为对目标的量测。 连续跟踪时, 下一帧的采样粒子基于上一帧的量测结果产生。 与传统的基于序贯重要性采样的粒子滤波方法相比
2018-12-13 16:05:002 为了解决核化相关滤波器( KCF)在复杂场景下鲁棒性差的问题,提出了基于自适应组合核(SACK)的目标跟踪算法。跟踪任务分为位置跟踪和尺度跟踪两个独立部分。首先,以线性核和高斯核的自适应组合作为核跟踪滤波器,构造了SACK权重的风险目标函数。
2018-12-19 14:05:383 本文档的主要内容详细介绍的是十大滤波算法的资料介绍包括了:限幅滤波法(程序判断滤波法),中位值滤波法,算术平均滤波法,递推平均滤波法(滑动平均滤波法),中位值平均滤波法,限幅平均滤波法,一阶滞后滤波法,加权递推平均滤波法,消抖滤波法,限幅消抖滤波法。
2019-01-04 08:00:0028 为提高分层卷积相关滤波视觉跟踪算法的实时性能,提出一种稀疏卷积特征的实时目标跟踪算法。首先,在分析不同层卷积特征的基础上,采用等间隔采样的方式提取每个卷积层的稀疏卷积特征;然后,对每个卷积层特征
2019-01-17 15:12:441 性,提出一种基于次优视差的多模滤波目标跟踪算法。首先,采用目标不确定性椭球投影面积变化最大的方向为次优视差方向,并将其作为机器人视差控制方向;然后,采用多模滤波算法计算目标各种运动方式的概率;其次,对各运动方式的目标状态进
2019-03-28 13:41:126 这篇文章将非常详细地介绍计算机视觉领域中的目标跟踪,尤其是相关滤波类方法,分享一些作者认为比较好的算法。
2019-07-05 10:15:265304 针对纯测距条件下移动传感器网络中的目标跟踪冋题,提岀一种基于非线性滤波和多维标度的目标跟踪算法。根据传感器和目标之间存在的相对运动,建立带约束的动态距离模型,利用无迹卡尔曼滤波算法提高模型对距离
2021-03-17 10:50:2011 多模板尺度自适应核相关滤波器( KCF MTSA)跟踪算法在目标移动模糊、旋转和尺度变化时跟踪距离精度与成功率较低。针对该问题,提岀一种结合多特征和尺度估计的改进 KCF MTSA目标跟踪算法。采用
2021-03-23 15:30:369 中值滤波和多级中值滤波的特点和适用范围,针对滤波算法的邻域性特点,设计了基于FPGA的滤波器整体架构,并设计了标准中值滤波和多级巾值滤波两种滤波算法的FPGA实现方案和功能仿真.同时通过实验结果对两种算法的滤波效果进行比
2021-04-01 11:21:4841 传统相关滤波方法在目标运动模糊和光照变化上取得了一定的鲁棒效果,但当目标存在形变、颜色变化、重度遮挡等干扰因素时难以实现跟踪,鲁棒性差,且当目标丢失后不能再恢复,无法实现长时间跟踪。因此,文中
2021-04-23 14:31:347 目标漏跟。针对该问题,在多伯努利滤波框架下,深度分析目标的特征信息,引λ抗干扰的卷积特征,提出基于卷积特征的多伯努利视频多目标跟踪算法,并在目标状态提取过程中,进一步提岀模板更新,使用自适应学习速率进行更新
2021-05-12 15:18:1111 当被跟踪目标受变形、遮挡、快速和不规则运动等因素的干扰时,基于单一颜色特征的相关滤波器跟踪算法难以实现精准的目标定位。为此,分析基于多通道颜色特征 Color Names(CN)的核相关滤波器算法
2021-05-27 15:51:509 针对传统相关滤波跟踪器在目标尺度变化和部分遮挡时效果不佳等问题,基于KCF提出了一种全局块与局部块协作的分块跟踪算法。该算法首先根据目标的外观特征,对跟踪目标进行水平或垂直分抉,并分别训练两个局部
2021-05-28 16:44:192 标准粒子滤波算法用于无线传感器网络运动目标跟踪时,非高斯噪声环境会降低其跟踪精度和计算效率。针对该问题,结合多传感器测量模型和 Kullback- Leibler距离(KLD)采样方法,提出一种
2021-06-02 16:21:044 结合卡尔曼滤波等的四旋翼无人机目标跟踪算法
2021-06-23 15:00:1924 对象跟踪问题一直是计算机视觉的热点任务之一,简单的可以分为单目标跟踪与多目标跟踪,最常见的目标跟踪算法都是基于检测的跟踪算法,首先发现然后标记,好的跟踪算法必须具备REID的能力。今天小编斗胆给大家推荐一个结合传统算法跟深度学习,特别好用的对象跟踪算法框架DeepSort
2022-09-14 16:20:052188 粒子滤波器方法通常用于视觉跟踪。从统计角度来看,它是一种顺序蒙特卡罗重要抽样方法,用于根据观测序列估计动态系统的潜状态变量。 粒子滤波步骤: 初始状态:用大量粒子模拟X(t),粒子在空间内均匀分布
2023-01-13 10:17:331045 该项目包含使用高级综合 (HLS) 的 2D 中值滤波器算法的实现。该项目的目标是在不到 3 ms的时间内对测试图像进行去噪,同时消耗不到 25% 的可用 PL 资源。
2023-07-12 15:19:44718 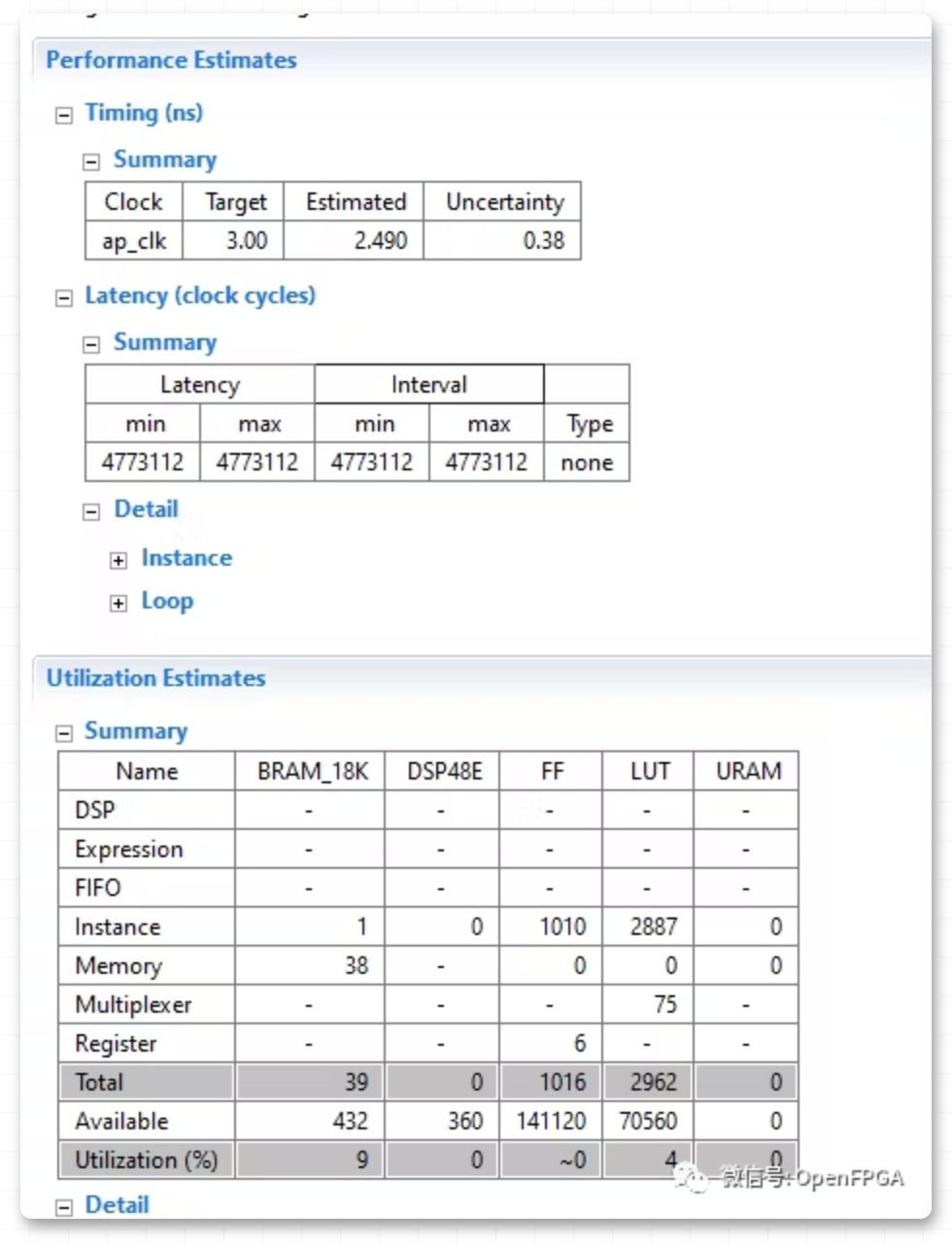
将再啰嗦一次,详解从均值滤波到非局部均值滤波算法的原理及实现方式。 细数主要的2D降噪算法,如下图所示,从最基本的均值滤波到相对最好的BM3D降噪,本文将尽量用最同属的语言,详解这些算法的实现流程,并给予一定的 FPGA 加速实现的实现
2023-12-19 16:30:02242
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论