 电子发烧友App
电子发烧友App


引言
目前,灵动微控制器产品体系中,适配了MicroPython的,有MM32F3(MM32F3273G9P,Arm Cortex-M3)和MM32F5(MM32F5277E9P,ArmChina STAR-MC1),从官方数据来看,使用星辰处理器(STAR-MC1)的MM32F5对指令的处理效率要高于使用Cortex-M3处理器的MM32F3。如图x所示。

图x 星辰处理器同其他Arm处理器内核对比
然而,同一份MicroPython的启动过程,在使用同样主频(120MHz)的情况下,在MM32F5平台上运行,总是莫名其妙地慢好多。。。昨天跟同事Hao聊SDK的样例工程对Cache问题的处理策略时,偶然意识到,早期为MM32F5适配MicroPython的时候没有考虑过Cache,随即赶紧翻出来MicroPython的代码,果然没开。好吧,更新MicroPython项目下MM32F5平台的启动代码,替换来自于SDK中的system_mm32f5277e.c和system_mm32f5277e.h文件。
/*
* Copyright 2022 MindMotion Microelectronics Co., Ltd.
* All rights reserved.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include "hal_device_registers.h"
#if defined (__VTOR_PRESENT) && (__VTOR_PRESENT == 1U)
extern uint32_t __VECTOR_TABLE;
#endif
void SystemInit(void)
{
#if defined (__FPU_PRESENT ) && (__FPU_PRESENT == 1U)
#if defined(__FPU_USED) && (__FPU_USED == 1u)
SCB- >CPACR |= (SCB_CPACR_CP10_MASK | SCB_CPACR_CP11_MASK); /* set CP10, CP11 Full Access */
#endif
#endif /* __FPU_PRESENT */
#if defined (__ICACHE_PRESENT )&& (__ICACHE_PRESENT == 1U)
#ifndef ICACHE_DISABLED
if (SCB- >CLIDR & SCB_CLIDR_IC_Msk)
{
SCB_EnableICache();
}
#endif /* DCACHE_DISABLED */
#endif /* __ICACHE_PRESENT */
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
#ifndef DCACHE_DISABLED
if (SCB- >CLIDR & SCB_CLIDR_IC_Msk)
{
SCB_EnableDCache();
}
#endif /* DCACHE_DISABLED */
#endif /* __DCACHE_PRESENT */
}
/* EOF. */
其中,如果没有调用SCB_EnableICache()和SCB_EnableDCache()函数,默认关闭ICache和DCache,配置宏__ICACHE_PRESENT和__DCACHE_PRESENT来自于MM32F5270的芯片头文件mm32f5277e.h。
#define __STAR_REV 0x0100U /* Core revision r1p0 */
#define __SAUREGION_PRESENT 0U /* SAU regions present */
#define __MPU_PRESENT 1U /* MPU present */
#define __VTOR_PRESENT 1U /* VTOR present */
#define __NVIC_PRIO_BITS 3U /* Number of Bits used for Priority Levels */
#define __Vendor_SysTickConfig 0U /* Set to 1 if different SysTick Config is used */
#define __FPU_PRESENT 1U /* FPU present */
#define __DSP_PRESENT 1U /* DSP extension present */
#define __ICACHE_PRESENT 1U /* Define if an ICACHE is present or not */
#define __DCACHE_PRESENT 1U /* Define if an DCACHE is present or not */
编译,验证。找来两块之前下载了MicroPython固件的MM32F5开发板,向其中一块板子下载启用ICache和DCache之后的新固件。运行程序后,同使用之前版本固件的程序相比,果然有明显的提升。
图中板子运行程序启动MicroPython启动流程后,执行文件系统中Python源文件,闪烁小灯。图中下方的板子使用了启用Cache的程序,明显先完成MicroPython启动过程,先开始执行闪烁小灯的程序。
提交更新到代码仓库。Bingo!
commit 46372ed15d5769b25775a209c56d62c4cfc3ac5d (HEAD - > master, origin/master, origin/HEAD)
Author: Andrew SU < suyong_yq@126.com >
Date: Wed Jun 14 11:02:06 2023 +0800
update the startup code to enable the icache for mm32f5.
- this fix would accelerate the speed of running the instruction
sequence on mm32f5, which has the icache and dcache integrated.
Signed-off-by: Andrew SU < suyong_yq@126.com >
启用Cache后,之前在MM32F5微控制器平台上运行MicroPython小概率会出现hardfault的问题也得到的缓解,颇有“治好了某人多年老寒腿”的赶脚。^v^。
Cache的工作原理
Cache主要解决高速的CPU访问低速的存储器均衡速度差的问题,Cache通过预取数据/命令的机制,低速但整块地从低速存储器中取数据块,然后快速但串行地向CPU送数据流。高速的处理器大多使用哈佛结构,即使用指令总线和数据总线分别取指令和数据,对应有ICache和DCache。
Cache能够有效工作基于几个基本前提:
- 空间局部性:在最近的未来,使用到的信息和当前使用的信息在空间上会是邻近的。这个因为数据大部分都是连续存储的。所以主存当中的数据都是成块传输到Cache当中。
- 时间局部性:在最近的未来,使用到的信息可能是当前正在使用的信息。由于CPU本质上一个死循环,里面还有很多小循环的运行和操作,所以当前使用到的数据很可能会在循环当中,这样当前的数据有可能会在将来在再被调用一次。
另外,关于Cache还有其余部分需要了解:
- Cache与主存的映射方式:解决主存内数据块和Cache当中数据块的对应关系。
- 替换算法:Cache小,主存大。如果Cache中数据存满了之后,如何操作。
- Cache写策略:如果CPU修改了Cache中的副本,如何确保Cache中的数据和主存中的母本数据保持一致。
关于Cache的工作原理,以及设计机制,可参考计算机专业考研四大专业课之《计算机体系结构》,以及参考文献中的《一文搞懂Cache基本原理》。
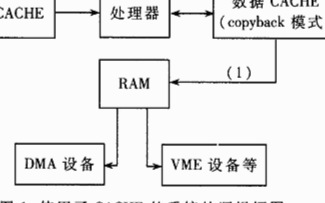
需要关闭DCache的情况
在微控制器系统中,有时会需要直接使用内存里的数据同外设交互,而不进入CPU,例如使用DMA(另一个总线主机AHB Master,但不需要Cache功能)相关,这种场景下,使用Cache的意义就不大了,甚至可能会出现数据不一致的风险,此时,就需要关闭Cache才能让系统正常工作。具体来说,ICache可以继续启用,毕竟指令都是送到CPU中执行,但DCache需要关掉,否则通过CPU写入到内存的数据未能及时同步物理内存时(基于Cache的写策略),启动DMA时搬运的数据不一定是实际需要传送的数据。另外,所有使用到“内嵌”DMA的外设模块的工程中,也需要小心谨慎地使用DCache,例如一些USB外设、ENET外设、显示加速器、以数据块为操作单元的加速计算模块等。
关ICache的情况虽然不多,但也存在,例如在涉及IAP应用中,从存放指令的介质中擦除指令、写入新指令后,再读指令,实际的新指令可能尚未替换到ICache中存放的旧指令,导致程序执行错误。
鱼和熊掌都想要
关闭DCache之后,CPU读数据的速度会明显慢很多,例如本文一开始展现的情况。怎样才能提升访问访问速度的同时,又能确保数据一致性呢?总不会人为频繁地开关Cache吧(很多微控制器对启动Cache的时机也有特别要求,需要在运行应用程序的一开始就要开启)。这里有两种可能的思路,供大家参考:
- 使用内存保护单元MPU
- 使用内存隔离/同步指令
这两种方法,分别是在空间上和时间上对数据进行隔离,控制仅在必要的空间上或时间上启用和关闭Cache。
使用内存保护单元MPU
MPU(Memory Protection Unit)内存保护单元在ARMv7-M架构下被引入。在 ARMv7-M架构下,Cortex-M3和Cortex-M4处理器对 MPU 都是选配的,不是必须的。ARMv8-M架构下继续沿用了MPU,星辰处理器STAR-MC1就使用了ARMv8-M。
MPU是一个可以编程的设备模块,可用来定义内存空间的属性,比如特权指令和非特权指令,以及Cache是否可访问。ARMv7-M通常支持8个region,每个region 代表一段连续的区域。
关于MPU的用法,可参见参考文献中的《ARM-MPU内存保护单元详解》和《Armv8-M Architecture Reference Manual》。
使用内存隔离/同步指令
ARM的指令集中,有内存隔离指令DMB(Data Memory Barrier)、DSB(Data Synchronization Barrier)和ISB(Instruction Synchronization Barrier):
- 数据存储器隔离。DMB 指令保证: 仅当所有在它前面的存储器访问操作都执行完毕后,才提交(commit)在它后面的存储器访问操作。
- 数据同步隔离。比 DMB 严格: 仅当所有在它前面的存储器访问操作都执行完毕后,才执行在它后面的指令(亦即任何指令都要等待存储器访问操作——译者注)。
- 指令同步隔离。最严格:它会清洗流水线,以保证所有它前面的指令都执行完毕之后,才执行它后面的指令。
在一些ARM程序代码中,会用到__DSB() 指令,特别是在一些中断处理函数中。例如:
//中断定时器PIT中断处理函数
void PIT_LED_HANDLER(void)
{
/* Clear interrupt flag.*/
PIT_ClearStatusFlags(PIT, kPIT_Chnl_0, kPIT_TimerFlag);
pitIsrFlag = true;
__DSB();
}
程序通过中断信号进入中断处理函数时,首先应当清除相应的中断标志位,但有些CPU的时钟太快,快于中断使用的时钟,就会出现清除中断标志的动作还未完成,CPU就又一次重新进入同一个中断处理函数,导致死循环,__DSB() 指令的作用就是避免上述情况的发生。
总结
本文从修复MicroPython启动程序在MM32F5微控制器上比较慢的问题,体验了星辰处理器中Cache的作用。简单介绍了Cache的工作原理和机制,重点介绍了使用Cache可能存在的风险,并进一步探讨了如何能用到Cache高速存取的同时避免数据不一致的情况。











 工商网监
工商网监
评论