步进电机控制器电路
2010-02-05 15:32:40 2478
2478 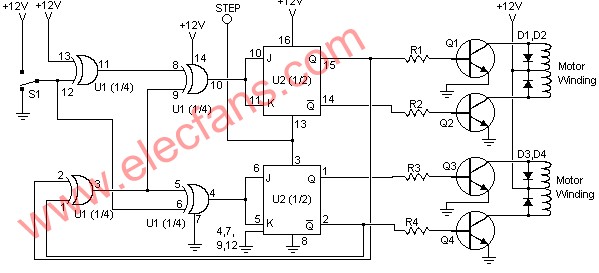
本文介绍了一些重要的步进电机相关技术,为开发人员基本了解步进电机的工作原理提供了足够的信息,同时也介绍了用微控制器或数字信号处理器控制 步进电机 的方法。 步进电机也
2011-09-08 11:46:582893 
在本教程中,我们将步进电机与PIC微控制器PIC16F877A连接。
2022-11-15 17:25:101016 
parameters of the controller setup program have been completed in subroutine.子程序中完成了激光器、程控衰减器和样品移动台的步进电机控制器...
2021-08-31 08:44:22
用单片机设计一个步进电机控制器。要求能对步进电机实现正、反转及速度控制,同时能对步进电机进行位置控制,即能控制步进电机从一个位置精确地运行到另一个位置。步进电机为四相反应式,软件生成脉冲序列,可设
2012-12-08 15:50:26
用单片机设计一个步进电机控制器。要求能对步进电机实现正、反转及速度控制,同时能对步进电机进行位置控制,即能控制步进电机从一个位置精确地运行到另一个位置。步进电机为四相反应式,软件生成脉冲序列,可设
2013-03-20 16:48:37
步进电机控制器总结一、整体框架:系统在通信方式时支持主从控制二、系统原理1、 控制信号模块电机控制信号:EN——>电机使能信号,只有当该信号有效的时候,步进电机才会工作DIR/CP+——>
2021-09-07 07:46:23
步进电机与步进电机控制器连接:A+:黑A-:绿B+:红B-:蓝电机控制器与arduino板连接:PUL-,DIR-,EN-连arduino的地EN+:脱机信号,接地或者不接DIR+:控制转动方向,高电平正转PUL+:控制脉冲...
2021-07-08 07:21:38
特点◆ 高性能、低价格◆ 采用独特的控制电路,有效的降低了噪音,增加了转动平稳性◆ 最高反应频率可达200Kpps ◆ 步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电机过热◆ 双
2008-11-07 16:10:51
的用户多数不研究电机的控制和优化,而是将其应用于某个场合。基于这点,国外开始盛行一体化步进系统,即将步进电机、反馈装置、驱动放大器、运动控制器组合成一个整体。其优势为:体积小、故障率低、无需匹配电机
2021-07-05 06:12:18
01步进电机驱动控制器步进电机驱动器作为实验装置可控的部分,能够提供自动测量的方法。前面已经有两款步进电机驱动器:SH-20403AXIS12双轴蓝牙移动框架基于ESP8266WiFi步进电机控制
2021-08-31 08:32:52
控制器硬件:一体化步进电机控制器 modbus-rtu-485控制器云台硬件:北京江云光电 DZY200RA100电动旋转云台1,控制接线,连接RS485通信接线: USB转485的 T/R+-
2021-08-31 08:26:26
SM1P步进电机控制器怎么接线?
2021-10-09 07:33:24
江湖救急呀,大神们。小弟目前的任务是用labview来编写步进电机控制器程序,也就是编写脉冲发生器的程序,不知道该如何开始,求大神们给点思路,多指点指点。多谢了。
2015-04-23 14:54:39
伺服电机控制器与步进电机控制器有啥不一样?
2021-02-25 07:42:10
控制器的输出信号为双脉冲,能否控制单脉步进驱动器驱动两相步进电机?
2023-04-04 16:42:23
用vhdl语言做步进电机的控制器。应该如何入手呢?看了很多资料,各有各的思路,越看越混乱,要分成几个模块去做呢? 求大神带!
2016-04-27 10:21:33
基于LabVIEW的步进电机控制器的设计
2012-09-04 15:14:31
新人一枚,希望大家能发个关于 基于LabVIEW的步进电机PID速度控制器 的文章,谢谢了!!!!
2015-04-20 20:34:47
如何利用HMI USART串口屏做一个步进电机控制器呢?其代码该怎样去实现呢?
2021-12-23 06:55:13
本文介绍通过FPGA实现的步进电机控制器。该控制器可以作为单片机或DSP的一个直接数字控制的外设,只需向控制器的控制寄存器和分频寄存器写入数据,即可实现对步进电机的控制。
2021-04-29 06:05:44
步进电机控制器能够发出均匀脉冲信号,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个角度。驱动器所接收
2020-10-05 09:00:33
微型步进电机驱动控制器,北京伟恩斯技术有限公司集驱动和控制于一体,结构紧凑,便于安装,广泛运用于生物仪器、医疗器械、工业自动化、多点控制组网矩阵等领域。有脉冲方向型,485总线型,CAN总线型等,通过编程,可在驱动器内部实现轨迹规划等功能,提高运动控制系统的精度和效率。...
2021-08-31 08:09:29
微型步进电机驱动控制器到底长什么样?
2021-10-28 07:46:29
微型步进电机驱动控制器,北京伟恩斯技术有限公司集驱动和控制于一体,结构紧凑,便于安装,广泛运用于生物仪器、医疗器械、工业自动化、多点控制组网矩阵等领域。有脉冲方向型,485总线型,CAN总线型等,通过编程,可在驱动器内部实现轨迹规划等功能,提高运动控制系统的精度和效率。...
2021-08-31 07:06:25
国内普遍采用TM320系列的DSP器件作为永磁同步电机控制系统的主控制器,因CPU负载过重导致系统实时性降低的问题日益显著。采用具有并行工作特性的FPGA器件作为主控制器能够提高系统实时性。因此,我们具体该怎么设计呢?
2019-08-14 08:02:56
STM32发出脉冲一般有哪几种方式?怎样通过控制器输入脉冲去控制步进电机呢?
2021-12-21 06:25:47
求大神分享SM1P步进电机控制器操作说明
2021-10-09 07:40:22
Arduino 2560控制两个步进电机用arduino和步进电机控制器驱动两个步进电机,具体的接线过程和怎样连接都在图片上。准备工具:两个步进电机(我用的是J42):Arduino板(我用
2021-08-31 06:13:29
描述硬盘步进电机速度控制器这个想法来自控制步进电机的需要,而不需要复杂的编程或微控制器和其他复杂的 IC,我想找到最便宜的解决方案。PCB
2022-08-05 06:29:44
跪求!!求基于LabVIEW步进电机PID速度控制器的设计
2015-04-21 15:52:00
基于GAL器件的步进电机控制器的研究与设计
采用GAL控制脉冲分配的逻辑设计若采用集成电路芯片来实现三相六拍步进电机的控制,所用器件较多! 电路一般比较复杂# 为
2008-10-21 01:53:23 42
42 LabVIEW控制步进电机的并口通讯研究:本文给出了基于LabVIEW控制步进电机的方法,并讲述了控制系统的构成。
2009-04-02 10:55:1368 本文描述的是常用的单片机和步进电机驱动芯片实现步进电机的控制和驱动。
2009-04-02 15:47:5189 本文利用陈列逻辑器件GAL16V8对步进电机实现控制,给出了89C55单片机控制的硬件、软件设计实例。
2009-04-02 16:30:16200 本文应用单片机、步进电机驱动芯片、字符型LCD 和键盘阵列, 构建了集步进电机控制器和驱动器为一体的步进电机控制系统。二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/
2009-04-06 17:12:3141 直流步进电机控制器实例(VHDL源代码):步进电机控制器.vhd,直流电机控制器.vhd
2009-05-27 08:51:5462 直流步进电机控制器实例(VHDL源代码):
2009-05-27 10:23:0547 本文应用单片机、步进电机驱动芯片、字符型LCD和键盘阵列,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。二维工作台作为被控对象通过步进电机驱动滚珠丝杆
2009-09-10 09:19:3033 用MCP定时器控制步进电机:步进电机简介1.1.1 步进电机步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。步进电机靠一种叫环形分配器的电子开关器件,通过功
2009-09-19 11:36:3222 用GPIO做步进电机控制:步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。步进电机靠一种叫环形分配器的电子开关器件,通过功率放大器使励磁绕组按照顺序轮流接通
2009-09-19 11:37:5869 GY8608 CAN 总线接口的双路步进电机控制器:1、CAN 总线接口,可通过同时控制2 路步进电机。2、如果只控制一路步进电机,最大工作频率25khz。3、如果同时控制两路步进电机,则
2010-01-14 18:40:1434 控制步进电机的现场总线端子-集成的步进电机控制器:用于新驱动技术的总线端子为最高功率为200W 的小型步进电机提供了运动控制解决方案。KL2531和KL2541 步进电机端子便是用于传
2010-10-06 09:52:5741 TMC428是TRINAMIC公司最新开发的步进电机运动控制器,它可减少电机控制软件设计的工作量,降低开发成本。以它为核心(包括TMC236型步进电机驱动器)构成的3轴步进电机驱动
2010-12-03 15:47:2971 基于FPGA的步进电机控制器设计
目前大多数步进电机控制器需要主控制器发送时钟信号,并且要至少一个I/O口来辅助控
2010-02-09 10:44:442465 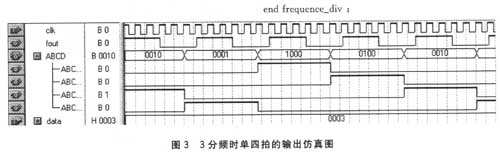
根据Nios II处理器的Avalon总线规范,设计了一款面向步进电机的控制器IP核。该定制IP核采用软、硬件协同设计的方法,功能符合Avalon总线的读写传输时序,具有完备的步进电机驱动能力。仿
2011-12-23 14:02:3244 基于单片机的步进电机控制系统的研究....
2016-01-04 15:25:3923 TMC428型3轴步进电机控制器的原理及应用
2016-04-25 10:10:0728 基于最小偏差法的步进电机速度控制方法研究。
2016-05-03 13:52:593 基于最小偏差法步进电机加减速控制的研究。
2016-05-03 13:52:598 基于单片机的步进电机升降速控制研究,下来看看
2016-05-03 13:52:599 基于SOPC的步进电机加减速PWM控制器IP核设计
2016-05-03 13:52:5918 步进电机短位移高响应加减速控制方法研究。
2016-05-04 14:09:564 步进电机的精确控制方法研究,有需要 下来看看
2016-05-04 14:35:598 步进电机控制器,感兴趣的小伙伴们可以看一看。
2016-08-23 16:23:3216 电子、电子信息专业电路单片机学习教程资料——步进电机的精确控制方法研究
2016-08-26 17:02:460 步进电机驱动控制技术及其应用设计研究
2016-12-26 17:21:550 单片机控制步进电机的方法研究与应用
2021-11-30 11:55:588 现代社会分工日益细化。不论企业还是用户,只有专注于最擅长的工作才能使利益最大化。步进电机的用户多数不研究电机的控制和优化,而是将其应用于某个场合。基于这点,国外开始盛行一体化步进系统,即将步进电机
2017-11-01 10:16:015 的步进电机多轴控制器是以微控制器(MCU)/微处理器(MPU)/专用集成电路(ASIC)/数字信号处理器(DSP)为核心,再辅以其他外围分立器件构成的。这种结构的步进电机多轴控制器的优点在于其硬件结构清晰,易于复制再现,对于类
2017-11-08 14:21:4512 意法半导体新推出的步进电机控制芯片L6470在一颗芯片上集成了功率级和一个数字控制内核。这款步进电机控制芯片能够通过SPI接口接收微控制器的运动曲线命令,按照预制的加速度和速度曲线自动执行运动,还能自动加快电机的运转速度,并使之保持预设的转速。
2018-07-19 07:07:002411 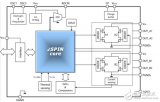
提出一种应用现场可编程门阵列(FPGA)实现多轴步进电机控制器的方法。采用IP设计思想,步进电机的运动控制由硬件电路(步进电机IP核)实现,轨迹计算由同一芯片上的微处理器(Nios II软核)实现
2017-12-06 10:41:3023 多轴步进电机插补控制器及多轴步进电机运动控制卡控制方法
2018-04-11 10:24:4726 步进电机和伺服电机是工控领域应用最广泛的两类产品,而它们的核心分别是步进电机控制器与伺服电机控制器,本文将给大家讲解这两种器件不一样的地方。
2018-09-16 09:48:192770 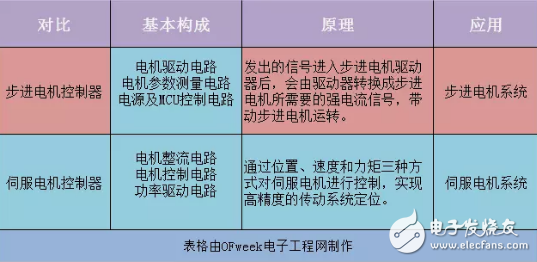
该项目旨在通过制造模块化控制器来简化步进电机的使用,该模块化控制器可以轻松驱动步进电机,而无需使用微控制器来完成工作。
2019-08-08 11:52:0317706 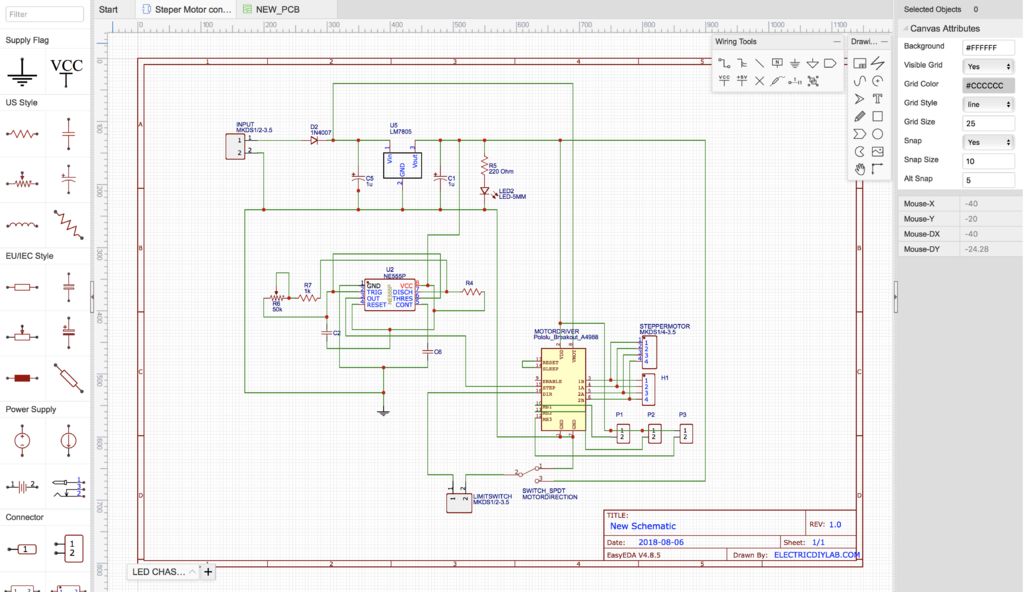
步进电机控制器是一种能够发出平均脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。
2019-10-01 15:10:005488 
步进电机控制器接线图如下:接线之前我们需要大概了解,控制器需要发送什么信号,才能控制驱动器,进而操纵电机。
2019-10-01 08:51:0014742 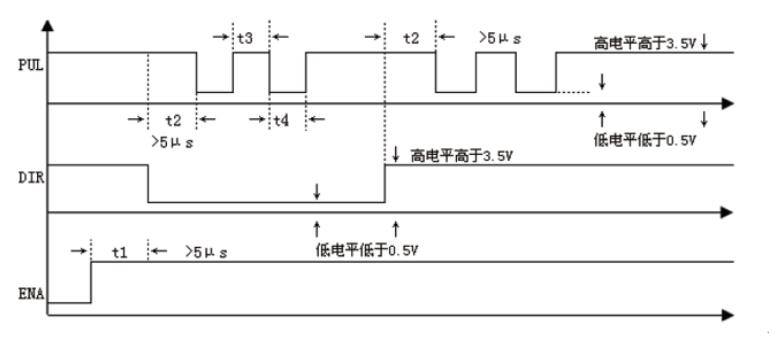
步进电机控制器是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个角度。
2019-10-01 08:58:0015865 步进电机控制器:它是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个角度。
2019-12-10 08:49:067858 为了适应这种控制需求,对通用步进电机控制器进行了改进,使其在具有自动和手动控制功能的同时,引入限位信号反馈控制。电机控制器使用硬件描述语言(HDL)编写,而限位信号则由位置感应电路中的光电开关器件自动反馈。
2020-04-15 10:03:011518 
步进电机和伺服电机是工控领域应用最广泛的两类产品,而它们的核心分别是步进电机控制器与伺服电机控制器,本文将给大家讲解这两种器件不一样的地方。
2020-12-14 20:26:091309 步进电机和伺服电机是工控领域应用最广泛的两类产品,而它们的核心分别是步进电机控制器与伺服电机控制器,本文将给大家讲解这两种器件不一样的地方。
2021-01-31 06:17:2415 介绍基于FPGA 的步进电机控制器的设计, 在分析步进电机的工作原理的基础上, 给出了层次化设计方案与VHDL程序,并利用Quartus Ⅱ进行了仿真并给出了仿真结果。它以FP GA 作为核心器件
2021-02-05 11:37:0027 步进电机控制器是一种能够发出均匀脉冲信号并且运用范围广泛的电机控制器,步进电机控制器怎么使用?下面就由小编来简单介绍一下!
2021-07-19 09:52:575456 的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 步进电机控制系统由步进电机控制器、步进电机驱动器、步进电机三部分组成,步进电机控制器是指挥中心,它发出信号脉冲给步进电机驱动器,而步进电机驱动器把接
2021-07-19 15:49:3311901 本文档作备份用。摘 要: 设计了一种具有多模式的步进电机控制装置,本装置基于STC的一款单片机STC89C52,软件部分由C51编写,包含启停中断程序、转向中断程序、步进电机调速程序以及键盘信号
2021-11-23 16:22:5118 引出MCU是 stm32F407ZGT6 最小系统板根据步进电机控制器的资料可以知道 步进电机的速度和转过的角度都是通过 PUL + 和PUL- 来控制的(这里...
2021-12-05 12:51:160 有多种版本的步进电机类型,也有多种版本的步进电机控制器设计。本电路是一款使用ICTDA2030作为驱动器的通用步进电机控制器。
2022-06-04 17:17:002478 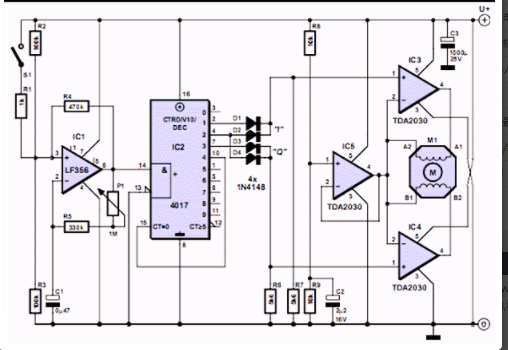
MS35711T 器件是一款步进电机控制器, 它使用外部 N 沟道 MOSFET 来驱动一个双极步进电机或两个刷式直流电机。 MS35711T 支持全步进到 1/256 步进驱动模式。通过使用自适应
2022-07-12 09:43:283356 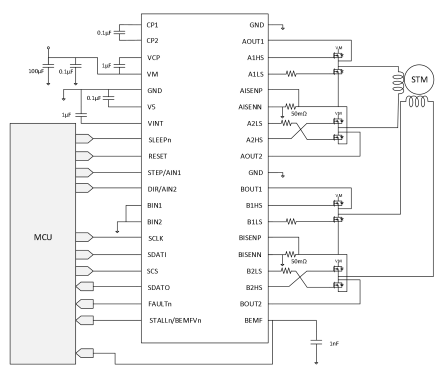
电子发烧友网站提供《硬盘步进电机速度控制器.zip》资料免费下载
2022-07-22 11:29:022 MS35711T 器件是一款步进电机控制器, 它使用外部 N 沟道 MOSFET 来驱动一个双极步进电机或两个刷式直流电机。
2022-07-31 10:26:464 电子发烧友网站提供《PCB设备步进电机控制器.zip》资料免费下载
2022-08-22 16:17:530 电子发烧友网站提供《如何测试TB6600步进电机驱动器控制器和步进电机.zip》资料免费下载
2022-12-06 15:51:083 步进电机控制器是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所
需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个
2023-03-23 10:24:221 步进电机控制器是一种专门用于控制步进电机的设备,可以用来控制步进电机的转速和方向。步进电机控制器通常包括一个驱动电路板和一个控制板,驱动电路板用于提供电源和输出脉冲信号,控制板则用于控制步进电机的运行。
步进电机控制器的应用设置一般包括以下几个方面:
2023-03-26 22:30:201184 步进电机控制器是一种能够发出均匀脉冲信号的电子产品,它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机
所需要的强电流信号,带动步进电机运转。步进电机控制器能够准确的控制步进电机转过每一个
2023-05-05 14:16:034 电子发烧友网站提供《步进电机控制器的FPGA的实现.pdf》资料免费下载
2023-10-07 16:29:171 电子发烧友网站提供《基于FPGA的步进电机伺服控制器设计.pdf》资料免费下载
2023-10-25 09:10:400 控制,需要使用步进电机控制器。步进电机控制器是一种电子装置,用于接收和处理控制信号,并将其转换为电机驱动信号。通过调整步进电机控制器的参数设置,可以使电机按照需求进行旋转,实现精确的运动控制。 在进行步进电
2024-01-19 10:50:22503 步进电机控制器是一种能够发出均匀脉冲信号的电子产品,主要用于控制步进电机的运动。它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。
2024-02-07 17:57:00651 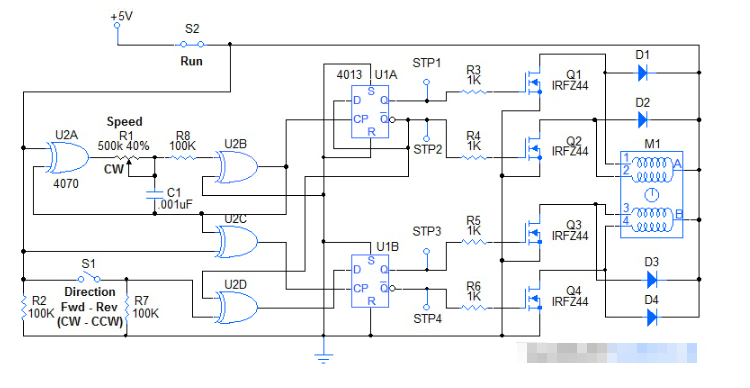
正在加载...
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论