 电子发烧友App
电子发烧友App


1.3 数据传输电路
三维图像数据利用设备控制箱通过RS2232 串口后, 再利用红外编解码技术把数据传到旋转的LED驱动板上, 其整个数据传输的通讯结构图如图2 所示。

在单片机串口模块中选用电平转换芯片MAX232 芯片实现TTL 电平与RS2232 电平的双向转换, 从而把三维图像数据传送到单片机的串行接收端口RXD 上, 然后单片机再通过其发送端口TXD把数据送出。图中的调制与红外发射模块通过由N E555 芯片构成的多谐振荡电路调制成38 kHz 的载波信号, 最后利用红外发射管TSAL6238 以光脉冲的形式向外发送。为了保证红外接收数据的准确性,N E555 产生的振荡频率要尽可能接近38 kHz,所以在选择电阻电容时要选用精密的元件并保证电源电压的稳定性。
数据传输电路中的红外接收解调模块选择Vishay 公司的TSOP1738, 其内部电路功能已包括把接收到的载波频率为38 kHz 的脉冲调制红外光信号转化为电信号, 并由前放大器和自动增益控制电路进行放大处理。然后, 通过带通滤波器进行滤波, 滤波后的信号由解调电路进行解调。最后, 由输出级电路进行反向放大输出。
所以, 选用此红外接收模块只要把其数据输出直接送到FPGA 处理即可。经实验测定, 利用此红外传输电路传输数据, 速率最高可达1 kB/ s。
1.4 角度编码器与电机模块电路
本系统立体显示是通过快速显示旋转空间中的一系列二维截面来实现的, 把LED 屏旋转一周分成180 个截面, 即每转2°要刷新一次显示屏。为了准确刷新显示屏, 本系统选用角度编码器来识别显示屏转过的角度, 角度编码器通过测试电机旋转发出脉冲可识别电机的旋转角度。本系统选用的角度编码器型号为ZSP38062022G2360B25224E。此编码器旋转一周可输出360 个脉冲信号。这样电机每转2°, 角度编码器便可发出2 个脉冲信号,LED 显示屏控制系统通过计数采集的角度编码器输出脉冲数来控制刷新LED 屏。
同时, 利用角度编码器的输出脉冲再通过单片机的处理可测出电机的旋转速度, 并可送到数码管显示。此外, 单片机可对测得的电机速度进行判断,判断其是否超出一定的范围, 如超出范围可通知由单片机控制的报警电路报警。其电机模块电路图如图3 所示。

电路中所用的电机为无源电机, 所以需要电机的驱动电路, 考虑电机在加负载时速度会减慢, 设计电机的速度可调, 其调节范围为0~ 4 200 r/m in。电路中电机与角度编码器套在一起, 其转速v ( r/s ) 与角度编码器的输出脉冲频率f (Hz) 具有如下关系:
v = f/360 (2)
通过此对应关系利用单片机可测出电机的旋转速度并可送到数码管显示。同时利用设计的报警器可达到对电机旋转速度的监控。
1.5 LED 寻址驱动电路
LED 寻址驱动控制电路主要是利用FPGA 芯片EP1C3 来控制LED的专门驱动芯片BHL2000, 并且EP1C3 根据采集的角度编码器的输出脉冲数按时读取存储器中的三维图像数据, 然后传送给BHL 2000, 从而来驱动LED 屏的列显示。同时, FP2GA 又将行扫描信号输出经后级放大来驱动L ED 屏的行显示, 其具体的原理框图如图4 所示。
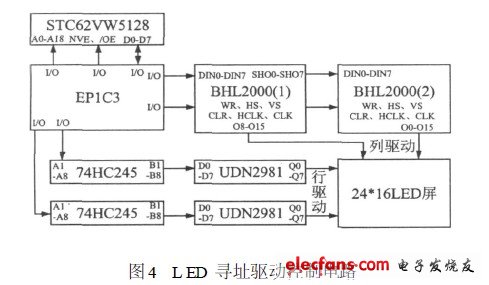
由于LED屏在旋转的过程中会造成亮度损失,所以FPGA 的行扫描信号输出需经过74HC245 和UDN2981 的放大, 这样行信号输出最大电流可达到500 mA。此外,BHL 2000 属于灌电流型器件且每个数据输出端电流可达到80 mA , 可直接驱动L ED 显示。驱动电路中的存储器选择STC62WV 5128, 其容量为512 k×8 b it, 而本系统一幅三维图像的数据量为6715 k×8 b it, 所以选择STC62WV 5128 是足够的。
值得说明的是, EP1C3 对BHL 2000 的写数据是在BHL 2000 写入时钟WR 的驱动下, 数据从D in02D in7 输入, 在内部移位寄存器中串行移位16 次后,由级联口SHO02SHO7移出。同时BHL 2000 行、场控制信号HS、VS确定数据在存储器中的存储位置, 最多可存8×16×32 个字节。此外,BHL 2000 的输出行、场控制信号HCL K 和CLR 确定取数位置, 在读出时钟CLK控制下进行灰度调制, 输出脉宽信号O02O15, 从而驱动LED显示屏。








 工商网监
工商网监
评论