 电子发烧友App
电子发烧友App


#include
#include
double my_atan2(double x, double y);
int main(void)
{
double z = my_atan2(100.0, 200.0);
printf("\n z = %f \n", z);
return 0;
}
double my_atan2(double x, double y)
{
const double sine[] = {0.7071067811865,0.3826834323651,0.1950903220161,0.09801714032956,
0.04906767432742,0.02454122852291,0.01227153828572,0.006135884649154,0.003067956762966
,0.001533980186285,7.669903187427045e-4,3.834951875713956e-4,1.917475973107033e-4,
9.587379909597735e-5,4.793689960306688e-5,2.396844980841822e-5
};
const double cosine[] = {0.7071067811865,0.9238795325113,0.9807852804032,0.9951847266722,
0.9987954562052,0.9996988186962,0.9999247018391,0.9999811752826,0.9999952938096,
0.9999988234517,0.9999997058629,0.9999999264657,0.9999999816164,0.9999999954041,
0.999999998851,0.9999999997128
};
int i = 0;
double x_new, y_new;
double angleSum = 0.0;
double angle = 45.0;
for(i = 0; i < 15; i++)
{
if(y > 0)
{
x_new = x * cosine[i] + y * sine[i];
y_new = y * cosine[i] - x * sine[i];
x = x_new;
y = y_new;
angleSum += angle;
}
else
{
x_new = x * cosine[i] - y * sine[i];
y_new = y * cosine[i] + x * sine[i];
x = x_new;
y = y_new;
angleSum -= angle;
}
printf("Debug: i = %d angleSum = %f, angle = %f\n", i, angleSum, angle);
angle /= 2;
}
return angleSum;
}
程序运行的输出结果如下:
Debug: i = 0 angleSum = 45.000000, angle = 45.000000
Debug: i = 1 angleSum = 67.500000, angle = 22.500000
Debug: i = 2 angleSum = 56.250000, angle = 11.250000
Debug: i = 3 angleSum = 61.875000, angle = 5.625000
Debug: i = 4 angleSum = 64.687500, angle = 2.812500
Debug: i = 5 angleSum = 63.281250, angle = 1.406250
Debug: i = 6 angleSum = 63.984375, angle = 0.703125
Debug: i = 7 angleSum = 63.632813, angle = 0.351563
Debug: i = 8 angleSum = 63.457031, angle = 0.175781
Debug: i = 9 angleSum = 63.369141, angle = 0.087891
Debug: i = 10 angleSum = 63.413086, angle = 0.043945
Debug: i = 11 angleSum = 63.435059, angle = 0.021973
Debug: i = 12 angleSum = 63.424072, angle = 0.010986
Debug: i = 13 angleSum = 63.429565, angle = 0.005493
Debug: i = 14 angleSum = 63.432312, angle = 0.002747
z = 63.432312
减少乘法运算
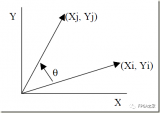
现在已经有点 Cordic 算法的样子了,但是我们看到没次循环都要计算 4 次浮点数的乘法运算,运算量还是太大了。还需要进一步的改进。改进的切入点当然还是坐标变换的过程。我们将坐标变换公式变一下形。
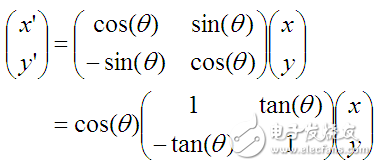
可以看出 cos(θ)可以从矩阵运算中提出来。我们可以做的再彻底些,直接把 cos(θ) 给省略掉。
省略cos(θ)后发生了什么呢,每次旋转后的新坐标点到原点的距离都变长了,放缩的系数是1/cos(θ)。不过没有关系,我们求的是θ,不关心ρ的改变。这样的变形非常的简单,但是每次循环的运算量一下就从4次乘法降到了2次乘法了。
还是给出 C 语言的实现:
double my_atan3(double x, double y)
{
const double tangent[] = {1.0,0.4142135623731,0.1989123673797,0.09849140335716,0.04912684976947,
0.02454862210893,0.01227246237957,0.006136000157623,0.003067971201423,
0.001533981991089,7.669905443430926e-4,3.83495215771441e-4,1.917476008357089e-4,
9.587379953660303e-5,4.79368996581451e-5,2.3968449815303e-5
};
int i = 0;
double x_new, y_new;
double angleSum = 0.0;
double angle = 45.0;
for(i = 0; i < 15; i++)
{
if(y > 0)
{
x_new = x + y * tangent[i];
y_new = y - x * tangent[i];
x = x_new;
y = y_new;
angleSum += angle;
}
else
{
x_new = x - y * tangent[i];
y_new = y + x * tangent[i];
x = x_new;
y = y_new;
angleSum -= angle;
}
printf("Debug: i = %d angleSum = %f, angle = %f, ρ = %f\n", i, angleSum, angle, hypot(x,y));
angle /= 2;
}
return angleSum;
}
计算的结果是:
Debug: i = 0 angleSum = 45.000000, angle = 45.000000, ρ = 316.227766
Debug: i = 1 angleSum = 67.500000, angle = 22.500000, ρ = 342.282467
Debug: i = 2 angleSum = 56.250000, angle = 11.250000, ρ = 348.988177
Debug: i = 3 angleSum = 61.875000, angle = 5.625000, ρ = 350.676782
Debug: i = 4 angleSum = 64.687500, angle = 2.812500, ρ = 351.099697
Debug: i = 5 angleSum = 63.281250, angle = 1.406250, ρ = 351.205473
Debug: i = 6 angleSum = 63.984375, angle = 0.703125, ρ = 351.231921
Debug: i = 7 angleSum = 63.632813, angle = 0.351563, ρ = 351.238533
Debug: i = 8 angleSum = 63.457031, angle = 0.175781, ρ = 351.240186
Debug: i = 9 angleSum = 63.369141, angle = 0.087891, ρ = 351.240599
Debug: i = 10 angleSum = 63.413086, angle = 0.043945, ρ = 351.240702
Debug: i = 11 angleSum = 63.435059, angle = 0.021973, ρ = 351.240728
Debug: i = 12 angleSum = 63.424072, angle = 0.010986, ρ = 351.240734
Debug: i = 13 angleSum = 63.429565, angle = 0.005493, ρ = 351.240736
Debug: i = 14 angleSum = 63.432312, angle = 0.002747, ρ = 351.240736
z = 63.432312










 工商网监
工商网监
评论