编码器元件是一种可替代炭膜电位器的新型数字式电子元件,编码器按产品结构分为编码器元件和编码器组件.
2012-04-05 10:09:35 6252
6252 
增量式光电编码器原理及其结构
增量式光电编码器的特点是每产生一个输出脉冲信号就对应于
2010-06-02 22:50:4618420 本帖最后由 mr.pengyongche 于 2013-4-30 02:57 编辑
FPGA+DSP 在空中背景下运动目标实时跟踪系统中的应用 摘要:针对电视跟踪系统对飞行目标的检测与跟踪受到速度瓶颈
2012-12-28 11:19:07
本人刚入门FPGA,不知道如何实现FPGA+DSP,FPGA+ARM接口设计,网上查询有的说FPGA+DSP可以通过EMIF,IP核实现,FPGA+ARM可以通过SPI,有没有具体硬件参考的?
2016-08-27 11:30:26
.FPGA+DSP的导引头信号处理结构成为当前以及未来一段时间的主流。FPGA和DSP处理器具有截然不同的架构,在一种器件上非常有效的算法.在另一种器件上可能效率会非常低。如果目标要求大量的并行处理或者最大
2019-08-30 06:31:29
刚刚学习fpga方面的知识,fpga如何测量一个增量式编码器,消除抖动的话是否也是在上升沿和下降沿都进行计数处理,这样的话怎样设定可以保障计数器可以同时在两个always 下进行计数,可以给一下大概的例程最好
2016-01-11 18:27:47
如图是海德汉编码器输出信号调理电路,Z+,Z-为差分信号,电路的作用是将三角波信号经过比较器调理成方波信号,但我不是太懂原理,希望大家能指教一下。
2018-12-03 09:37:16
有人用过海德汉IK220卡读取SSI编码器角度么。运行海德汉自己给的读SSI的VI,总是提示找不到卡。这是什么原因呢。
2017-04-14 15:52:22
我用labview对海德汉绝对式编码器进行编程,设定一个几毫秒的采样周期,将读取到的位置值经过计算转化成速度值,并有过零判断,但是读出的转速值波动较大,海德汉25位精度的,本身精度特别高,但是测试几百转的转速波动能达到几十转,请问大家遇到过这种情况吗?有什么可能的原因吗?万分感激。
2017-05-05 22:40:54
编码器的原理是什么?编码器可分为哪几类?编码器是如何进行接线的?编码器软件四倍频技术是什么?
2021-08-04 06:08:39
编码器是什么?编码器工作原理是什么?
2021-10-19 09:59:08
编码器是什么?编码器主要分为哪几种?编码器测速的大致原理是什么?
2021-06-30 07:48:39
伺服电机的种类有哪些?伺服电机主要的作用是什么?编码器的结构域工作原理是什么?编码器的分类和特点有哪些?伺服电机与编码器的工作是什么?
2021-06-28 08:11:44
编码器的工作原理是什么?如何通过波形得出正反转的判据呢?编码器的程序结构如何实现?
2021-10-14 06:36:49
为什么在使用同步机做自整定的时候,整定的角度有时候偏差会比较大,会出现飞车现象。而更改编码器后可以正常整定。请问编码器什么情况下会导致这样的问题。另外,断电测试时候,编码器会损坏的原因有哪些?(电源稳定)
2018-09-07 14:40:40
AVS编码与DSP实现的视频编码器,不看肯定后悔
2021-06-08 06:01:15
为什么要用编码器?STM32编码器的原理是什么?
2021-11-24 07:32:10
UEC 111海德汉伺服驱动器销售可维修,汕头市罗克自动化科技有限公司全心全意为您服务!联系人郭经理:*** UEC 111海德汉伺服驱动器 汕头罗克自动化科技有限公司是专业的自动化设备
2020-03-13 16:54:33
UEC 112海德汉驱动器现货大卖,汕头市罗克自动化科技有限公司全心全意为您服务!联系人郭经理:*** UEC 112海德汉驱动器 汕头罗克自动化科技有限公司是专业的自动化设备维修中心
2020-03-13 16:57:05
cpld高手帮忙解答一下。感兴趣的也可以提出点建议哈。网上一般是fpga与海德汉的编码器接口通讯,但是fpga感觉有点浪费了,想直接用cpld来实现。
2011-05-30 22:45:23
为什么要用电机驱动?TB6612电机驱动怎么实现?为什么要用电机编码器?电机编码器怎么使用?
2021-10-20 07:36:53
什么是脉冲当量?伺服电机和编码器有什么关系?伺服电机自带编码器为什么还要外加编码器?
2021-11-01 06:20:22
海德汉伺服驱动器电源维修UVR150D北京HEIDENHAIN海德汉伺服驱动器维修常见故障有:上电无显示、电源灯不亮、过电流、过电压、欠电压、过热、过载、过速、缺相、抖动、编码器异常、模块损坏、接地
2021-11-16 07:27:27
编码器的原理是什么?电机编码器是如何进行接线的?编码器接口的配置方式有哪些?使用编码器时有哪些注意事项?
2021-08-02 10:21:23
增量式编码器工作原理是什么?增量式编码器的结构是由哪些部分组成的?光电旋转编码器使用方法是什么?单片机读取光栅编码器角度的方法是什么?
2021-06-30 07:29:18
电机系统编码器电路板 配件日本发那科 配件编码器驱动器 电机 电路板 机器人配件 回收拆机回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服回收发那科电机,回收发那科
2020-09-11 17:01:44
微信=电话 188-0743-0667回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服回收发那科电机,回收发那科A61L-0001-0093等驱动器、编码器回收发那科FANUC编码器,回收
2021-05-23 20:08:37
回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服***王姗姗回收发那科电机,回收发那科A61L-0001-0093等驱动器、编码器回收发那科FANUC编码器,回收A860-2020-T361
2020-11-05 21:42:34
公司的产品种类繁多,具有很好的品质保证,被广泛应用于机床、自动化领域,尤其在半导体和电子制造业等领域。海德汉光电编码器占有很大市场份额,而与之相配套的解码设备不适合嵌入式系统应用。本文针对实验用转台
2019-06-18 07:46:27
图像数据处理的工作原理是什么?基于FPGA+DSP的图像处理系统待如何去设计?
2021-06-02 06:54:28
基于FPGA+DSP的高速数据采集系统设计
2012-06-27 17:23:53
编码器实现指标分析LDPC码编码器实现编码器方案验证与优缺点分析
2021-04-30 06:08:10
增量式光电编码器结构和原理增量式光电编码器结构如图1所示。在它的编码盘边缘等间隔地制出n个透光槽。发光二极管(LED)发出的光透过槽孔被光敏二极管所接收。当码盘转过1/n圈时,光敏二极管即发出一个
2016-09-12 13:43:01
。目前想要选择单一FPGA进行设计,但是又担心片太贵预算超标,大家是否有合适的片子推荐?或者还是继续采用FPGA+DSP的结构,大家有啥看法呢?
2018-05-11 11:54:50
如何利用DSP去设计一款MPEG-4编码器?
2021-04-09 07:04:47
,生命周期缩短。实现功能强、性能指标高、抗干扰能力强、工作稳定可靠、体积小、功耗低、结构紧凑合理符合弹载要求的导引头信号处理器已经势在必行。过去单一采用DSP处理器搭建信号处理器已经不能满足要求.FPGA+DSP的导引头信号处理结构成为当前以及未来一段时间的主流。
2019-11-06 08:34:27
本文充分利用FPGA高速实时特点,采用并行处理及流水线设计,通过优化CAVLC编码结构和level编码子模块,提高CAVLC编码器的性能。
2021-04-28 06:34:13
,生命周期缩短。实现功能强、性能指标高、抗干扰能力强、工作稳定可靠、体积小、功耗低、结构紧凑合理符合弹载要求的导引头信号处理器已经势在必行。过去单一采用DSP处理器搭建信号处理器已经不能满足要求.FPGA+DSP的导引头信号处理结构成为当前以及未来一段时间的主流。
2019-08-19 06:38:12
编码器的关键参数有哪些呢?怎样使用STM32的编码器功能去读取编码器反馈的脉冲数呢?
2022-01-26 07:54:42
虽说FPGA+DSP的数字硬件系统正好结合了两者的优点,但有什么方法去证明FPGA+DSP系统中FPGA的关键技术是存在的呢?
2021-04-08 06:54:33
我想用FPGA+DSP做个声相仪,有感兴趣的小伙伴吗?一起开发,在上海最好啦。先做原型机出来,然后再考虑产品化。私聊:QQ 4010087
2017-04-25 14:53:48
电机的旋转编码器输出是5V的脉冲信号,DSP是3.3V供电的,这个接口怎么设计?
2013-04-08 14:11:56
信号。因为它们不同的感应原理,光编比磁编更容易失效。因为光编靠旋转码盘和光收发器配合工作。它们的距离非常近,但又不能接触。但是在振动下和结构的间隙变大的情况下,码盘会和光收发器碰撞。当光编码器的运动部件...
2021-06-28 11:35:40
本文详细介绍了一个测量各类海德汉编码器的数据的通用且实用的模块。该模块基于Xilinx FPGA平台和TI DSP平台,使用和调试方便,使用者可快速掌握;通过了实验和精度的检测,实现了设计目的,工作可靠;模块小巧,可以与上位机通信,可以很好的被结合到嵌入式系统中。
2021-04-30 07:01:32
日本发那科 配件编码器驱动器 电机 电路板 机器人配件 回收拆机回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服***微信同步
2021-04-27 17:12:03
系列PLC模块,回收三菱Q系列PLC模块,回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服,回收发那科电机,回收发那科A61L-0001-0093等驱动器、编码器,回收发那科fanuc编码器
2021-09-11 09:27:33
请问下有人用LabVIEW对海德汉ik220计数卡过编程吗?
2014-11-27 16:49:14
、DSP、ARM等器件直接进行并行通讯。实验结果验证了设计的正确性。可以看出,利用FPGA设计光电编码器信号处理模块,无论是设计过程,还是电路结构、都变得更加简洁。另外,在应用中注意FPGA的时钟周期应
2019-06-10 05:00:08
***同步长期回收发那科编码器传感器海德汉控制器电路板西门子施耐德伺服重庆回收发那科电机,回收发那科A61L-0001-0093等驱动器、编码器沈阳回收发那科FANUC编码器,回收
2021-10-16 09:59:02
介绍了一种基于FPGA+DSP 的数据采集与处理平台,给出了系统实现的总体方案,并阐述了各部分硬件电路的设计。重点对FPGA 内部各主要功能模块做了详细阐述,对各个模块的设计方法
2009-12-19 15:59:16 34
34 本文重点研究了AVS-P2熵编码器的算法、结构以及利用FPGA实现的若干关键问题,给出了详细的块变换系数熵编码器硬件结构,并通过了仿真验证。实现中提出了一种新的2D-VLC码表存储
2010-08-06 16:37:3824 增量型编码器与绝对型编码器的区别
编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增 量 型 编 码 器 (旋转
2009-09-26 17:36:292348
编码器,编码器是什么意思
编码器
编码器(encoder)是将信号
2010-03-08 15:04:262868 光电编码器,光电编码器是什么意思
光电编码器光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或
2010-03-08 15:20:401431 光电编码器原理结构图
增量式光电旋转编码器 所谓编码器即是将某种物理量转换为数字格式的装置。运动控制系统中的编码器的
2010-03-08 15:24:2315909 摘要:在FPGA+DSP构建的便件平台上,以链路口(LINKPORT)通信协议为根据,实现红外图像数据采集与显示。重点描述红外图像数据采集与经过LINKPORT传入DSP,图像压缩与经过LINKPORT传出DSP以及图像数据缓存与显示,最后介绍了程序高度过程中的方法。样机在实
2011-03-01 00:11:1287 本文设计了一种基于FPGA的编码器接口,用以进行编码器和伺服驱动器DSP处理器之间的通讯,并且具有CRC校验等纠错功能。本文给出了硬件连接和FPGA程序设计流程
2011-04-06 11:49:484733 
介绍了Virtex2Ⅱ系列FPGA (现场可编程门阵列)的时钟管理模块DCM (数字时钟管理器)的结构和功能,详细分析了RS(Reed2Solomon)码编码器的工作过程,提出了一种连续RS编码器设计方案,给出了硬件
2011-09-02 16:25:1383 分析了光电编码器4倍频原理,提出了一种基于可编程逻辑器件FPGA对光电增量式编码器输出信号4倍频、鉴相、计数的具体方法,它对提高编码器分辨率与实现高精度、高稳定性的信号检测
2011-11-03 15:13:1675 接口 - 海德汉编码器,全部产品接口介绍,各种接口技术。
2016-03-14 15:44:119 800Mbps准循环LDPC码编码器的FPGA实现
2016-05-09 10:59:2637 基于FPGA的经济型MPEG2运动图像编码器IP核设计
2016-08-30 15:10:149 基于FPGA+DSP实时图像采集处理系统设计
2017-01-03 11:41:359 本文介绍了基于DSP和FPGA的编码器信号测量及处理的通用模块,对海德汉编码器进行了概述等。
2017-10-13 18:17:2919 所处理的数据量少,算法结构复杂,适于运算速度快,寻址灵活的DSP数字信号处理器进行处理。这里提出了一种FPGA+DSP相结合的实时图像处理系统,并应用于传像光线束传递图像。CMOS实际采集的是光线束的出端图像,FPGA将CMOS采集的Bayer格式的
2017-10-26 15:44:562 所处理的数据量少,算法结构复杂,适于运算速度快,寻址灵活的DSP数字信号处理器进行处理。这里提出了一种FPGA+DSP相结合的实时图像处理系统,并应用于传像光线束传递图像。CMOS实际采集的是光线束的出端图像,FPGA将CMOS采集的Bayer格式的
2017-10-31 17:00:3412 电子编码器是电气火灾监控探测器的设定工具。通过电子编码器,可以读写探测器的地址编码、读写探测器剩余电流的报警值。
2017-11-10 17:30:478612 采用DSP 和FPGA 协同技术设计实现了一个高性能的MPEG24 视频编码器。FPGA 模块完成视频采集、YUV 分离、数据I/ O 等功能,而使用DSP 专一进行视频压缩编码。针对DSP
2018-07-18 07:45:00643 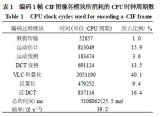
本文主要介绍了一种基于FPGA+DSP的视频控制的智能交通灯设计。该交通灯由视频采集、图像处理和控制模块组成,使用FPGA核心搭建专用高速视频采集模块,使用DSP处理器进行实时图像运算,通过图像算法提取车流量信息,最终结合模糊算法实现智能控制。
2018-01-09 14:15:411853 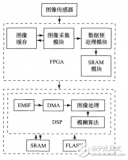
FPGA+DSP的数字硬件系统正好结合了两者的优点,兼顾了速度和灵活性。本文以导引头信号处理系统为例说明FPGA+DSP系统中FPGA的关键技术。
2019-01-08 08:36:002449 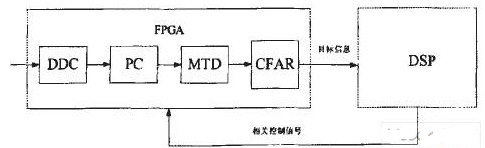
目前的视频监控行业,基于DSP的H.264编码器解决方案占有绝对优势的市场份额,这是由DSP方案开发周期相对较短的特性决定的。在ASIC或FPGA方案仍处于研发阶段时,DSP方案已捷足先登,并较好地解决了视频监控行业中H.264编码器方案从无到有的过程,为H.264在监控应用中走向成熟立下了汗马功劳。
2018-10-29 08:21:0012470 高速中频采样信号处理平台在实际应用中有很大的前景,提出采用FPGA+DSP的处理结构,结合高性能A/D和D/A处理芯片,设计了一个通用处理平台,并对其主要性能进行了测试。
2018-10-18 16:36:484637 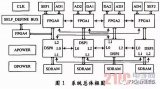
大,运算简单,但是要求运算速率高,可以用FPGA硬件来处理,上层所处理的数据量少,算法结构复杂,适于运算速度快,寻址灵活的DSP数字信号处理器进行处理。这里提出了一种FPGA+DSP相结合的实时图像处理系统,并应用于传像光线束传递图像。CMOS实际采集的是光线束
2018-10-22 22:00:01392 在信号处理领域中,基于FPGA+DSP的结构设计已经是系统发展的一个重要方向。随着该系统设计的广泛应用,功能变得更加丰富,成本日趋低廉。而在某些小型化应用的场合中,对系统体积的要求越来越高,因此
2019-02-22 14:37:587625 
透光型编码器主要由四部分结构构成——①LED发光素子;②透镜;③码盘;④受光IC。
2019-10-09 15:35:303348 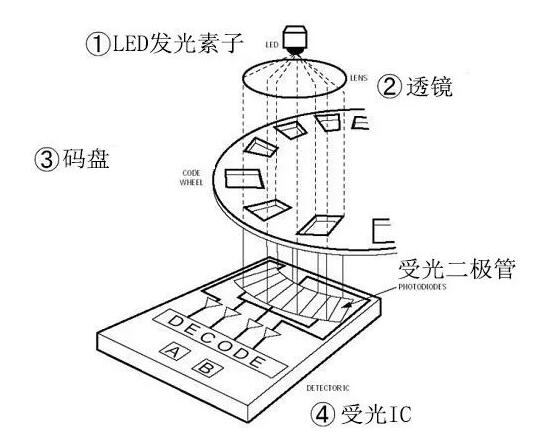
现场可编程逻辑阵列(FPGA)资源丰富,结构灵活,近年来发展迅猛。针对其特点,本文设计了基于FPGA的增量式光电编码器的接口电路,实现了对增量式编码器脉冲信号的倍频、鉴相及计数等功能。
2021-04-27 13:57:503886 
基于FPGA+DSP的高精度数字电源数据采集系统设计(开关电源技术发展综述)-该文档为基于FPGA+DSP的高精度数字电源数据采集系统设计讲解文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,,,,,,,
2021-09-24 11:32:0134 基于FPGA+DSP弹载SAR信号处理系统设计
2021-12-27 18:58:5121 增量型编码器与绝对值型编码器怎么选择?在进行编码器选择时,增量型编码器和绝对值型编码器是两种常见的选择。增量型编码器是一种基于脉冲计数的编码器,通常由光电编码器和霍尔编码器组成。这种编码器的主要优点
2023-05-08 11:28:331341 
编码器是什么?编码器有哪些分类及应用;编码器是什么?在数字信号处理和通信系统中,编码器是一种重要的设备,用于将原始数据转换为字符序列或二进制码序列。编码器是一种可以同时测量物体位置和方向的蒿精度
2023-05-18 11:08:473137 
电子发烧友网站提供《基于FPGA+DSP模式的智能相机设计.pdf》资料免费下载
2023-10-08 10:37:160 磁性编码器结构及原理,磁性编码器的结构:磁性编码器由两个主要组合而成,读头和标尺。标尺是一个含有磁性条纹的轮子或杆,而读头则固定在机械装置上,可以测量标尺相对于读头的位置。标尺上的磁条可以是南极
2024-01-22 11:24:40274 
编码器(Encoder)是将输入数据转化为特定编码表示的一种技术。对于不同类型的编码器,评判其好坏可以从多个方面进行考量,包括编码质量、速度、模型结构等。 编码器的原理主要基于自动编码器
2024-01-23 10:58:07415
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论