

















CAN和能源效率
由于CAN标准的演变和创新,可以实现系统级的电流和功耗管理。在汽车中未使用时通过禁用和激活低功耗模式,可以降低和优化整个系统的电流消耗。当然在必要情况下,ECU应当恢复运行。
如图所示,可以分析2个ECU、汽车泊车辅助和电子泊车制动的运行。当汽车的运行速度超过一定数值时(比如数千公里/小时),这些ECU就不再需要工作了。此时,这些ECU可以自行设置为低功耗模式,它们通过CAN网络和CAN报文接收车辆速度。当速度大于预先设定的阈值,这些ECU可以主动设置为低运行模式,禁用或关闭线路板组件(例如MCU或负载驱动器)的电源。只需最少的IC保持激活状态,用于监控CAN总线流量并检测特定的CAN报文或CAN的部分报文,它可以指示何时给暂停运行的IC重新上电,以便指示这些ECU它们应该恢复运行。
这有助于汽车整体功耗的降低和优化。
可以通过在与CAN总线相连的CAN收发器内部执行CAN报文检测,实现这种操作。这被称为CAN局部网络或CAN选择性唤醒。
挑战在于,通过极低功耗(目标低于500 uA)能够解码输入的CAN帧,在CAN物理层内以最低成本获得完整的局部网络,且不使用精确的振荡器组件(例如晶体振荡器或共振器)。需要提醒的是,MCU内部的CAN控制器采用极为准确的时钟,其测量的精度和偏差均可达到ppm级。显然,这样的时钟精度在硅片中还不能实现。
然而,CAN报文和解码只需要“百分比”量程的时钟。因此,凭借创新的技术和解决方案,这些方案可在混合信号硅工艺中完成,CAN报文的集成可以实现,从而用于CAN收发器功能。
这些解决方案采用高精度模拟功能(例如低功耗精确振荡器、低电流差分接收器、低功耗基准电压和偏置电路),并且与数字CAN报文解码器相互结合,以便实现输入CAN报文的解码。然后,输入CAN报文与预先选择的报文进行比较,收发器唤醒,并且驱动ECU恢复运行。
此外还面临着多种EMC挑战,尽管汽车中存在射频干扰和电气瞬变,CAN帧仍然需要正确解码。只有电路在极低电流下运行(大约十分之一微安),才能实现整体500微安的功耗目标,这变成了一项真正的实施挑战。
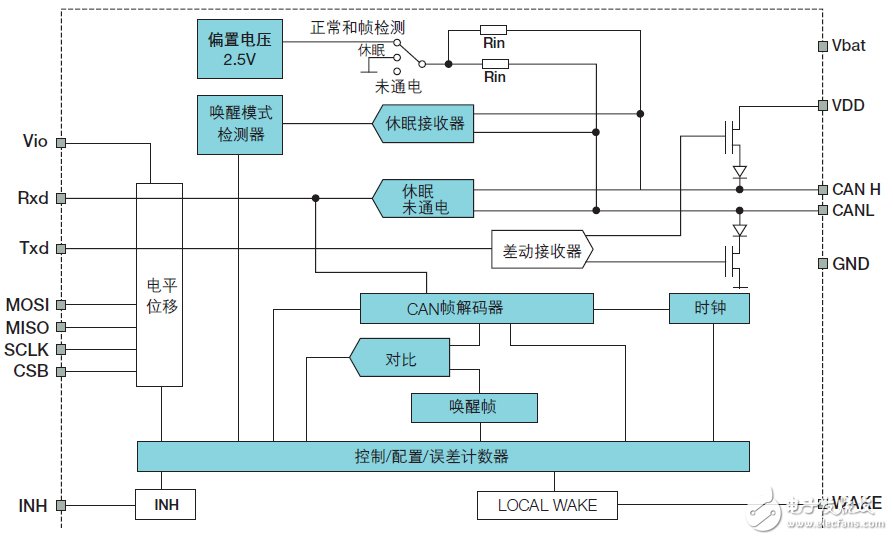
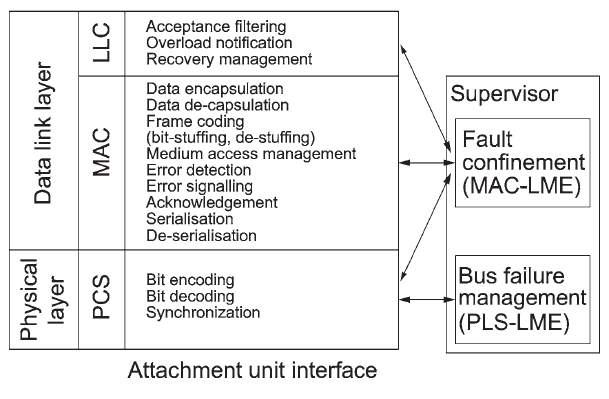
下图所示为CAN局部网络功能的典型结构图,采用市场标准引脚配置。灰色方框是CAN PN运行期间工作的部分,总计所需电流低于500微安。
执行局部网络功能的CAN收发器结构图
下表归纳了日后CAN收发器升级版的CAN FD的主要技术限制和影响。
技术汇总
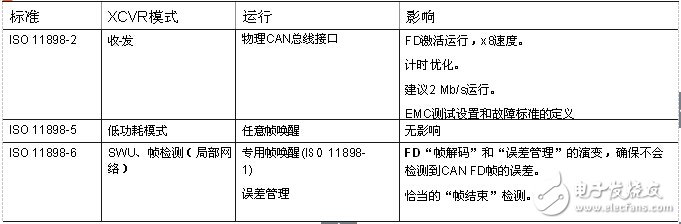
在正常运行时,如ISO11898-2中所述,主要影响在于满足EMC技术规范的前提下, 满足CAN FD时不会降低相应的要求。
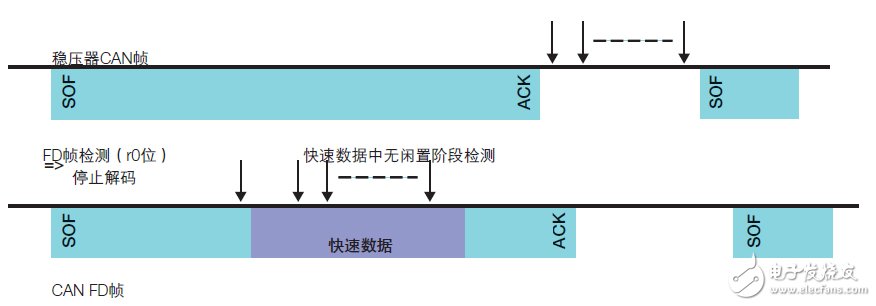
在局部网络运行中,如ISO11898-6所述,CAN FD不可干扰CAN输入报文检测,CAN PN收发器应当是“被动的可变速率”的。通过恰当检测CAN帧间间隔且适当区分快速数据段,可以达到上一目标。
常规数据帧和可变速率帧的对比
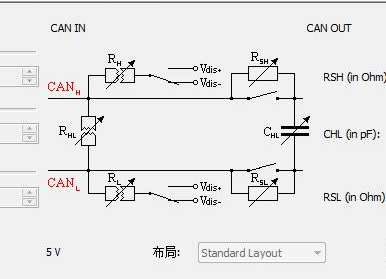
创新的反向集成
抗辐射和抗干扰、ESD稳健性、低功耗和CAN高速通信的更高波特率之间获得理想的权衡取舍,需要通过对模拟IC的每一种物理现象加以深入分析才能实现,正确的数据交互也同样如此。
市场向更高波特率的演变需求对期间的抗辐射和抗干扰水平产生了影响。这些要求需要在前期定义时就加以考虑,以便在提高性能的同时,不会降低可靠性。
飞思卡尔MC33901和MC34901 CAN FD收发器芯片拥有的高可靠性、极低的待机功耗,使得它在众多产品中独树一帜。飞思卡尔CAN物理层收发器拥有四个不同的型号,可以解决汽车(MC33901)和工业(MC34901)市场的各种挑战,提供配置或不配置总线唤醒选项(W版或S版)。
关于CAN PN,物理层需要模拟收发器的结构具有很低的功耗,这样可以抵御外部潜在的噪音干扰。再次声明,噪声模型与设计架构之间的一致性可以支持物理层拥有同样水平的EMC性能前提下,降低物理层收发器的功耗。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!





 工商网监
工商网监
用户评论(0)