“ 总线关闭(bus off)是CAN节点比较重要的错误处理机制。那么,在总线关闭状态下,CAN节点的恢复流程是怎样的?又该如何理解节点恢复流程的“快恢复”和“慢恢复”机制?本文将为大家详细分析总线
2020-08-04 11:16:00 13380
13380 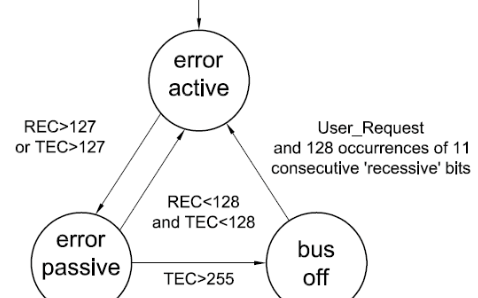
为了防止故障节点干扰甚至阻塞整个CAN网络系统,CAN协议实现了复杂的故障限制机制。为了保证通信的正常,CAN 2.0 总线协议总线中各节点需要采取以下措施进行错误检测。
2022-11-08 17:12:447486 错误帧是CAN总线用于进行错误通知的报文,可以将任何一个节点发现的错误通知给其他节点,包括发送节点;进而丢弃错误的报文,发送节点再进行报文的重新发送,保证传递信息的准确性。
2023-02-24 09:27:31898 为了防止故障节点干扰甚至阻塞整个CAN网络系统,CAN协议实现了复杂的故障限制机制。为了保证通信的正常,CAN 2.0 总线协议总线中各节点需要采取以下措施进行错误检测:
2023-06-21 17:14:181840 
在运行过程中使用MCU内嵌的CRC硬件模块计算对应代码区域的CRC校验码,并和之前存储的CRC校验码进行比较来检查对应代码区域的完整性。
2023-10-27 11:49:22761 
冲突的方法 框架结构 沟通程序 错误检测等, 3个理由了解为什么CAN总线更好 CAN总线的显著优势在于它高度灵活并提供许多独特的功能,从而导致其他行业的采用率大幅增加。 CAN总线是一种
2023-04-03 14:32:15
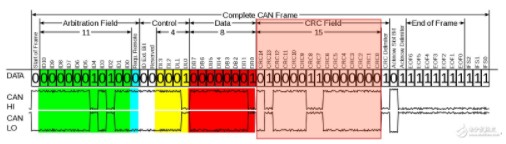
。在CAN总线通信过程中CAN控制器具备完整的错误检测能力,其中包含:位错误检测、格式错误检测、填充错误检测、应答错误检测和CRC错误检测。作为一种重要的错误检测手段,CRC错误检测是接收节点判断CAN帧信息的完整性并向总线确认应答的依据。
2019-09-11 11:51:22
层完成数据打包/解包、帧编码、媒体访问管理、错误检测、错误信令、应答、串并转换等功能。这些功能都是围绕信息帧传送过程展开的。3 CAN总线的报文传输和结构报文类型 在CAN2.0B的版本协议中有两种
2014-04-27 15:16:02
必须是相同的。• 传输层描述了 CAN 总线协议的内核,它负责位时序(bit timing)、同步、仲裁、应答、错误探测等。• 对象层负责报文的过滤、状态和控制。• 应用层完成用户指定的数据传输任务。CAN 总线的物理层为数据通信提供了物理连接,而实际的数据通信在其他 3 层中完成。
2018-12-14 14:17:02
0.CAN总线错误分析与解决–讲的最精辟的放在最前面我们知道CAN总线上的每个节点往总线上发送数据的同时会同时读取总线上的数据,并与自己发送的数据作对比。—CAN仲裁???CAN总线错误分别有发送
2022-01-14 06:55:10
我们先简单总结一下CAN的错误处理与故障界定:1.CAN控制器记录发生在发送/接收过程中,总线数据出现错误的总数(位错误,CRC错误等)。2.CAN控制器根据总线出错数量由低到高,依次处于主动错误
2021-08-20 06:18:45
)子层完成数据打包/解包、帧编码、媒体访问管理、错误检测、错误信令、应答、串并转换等功能。这些功能都是围绕信息帧传送过程展开的。3 CAN总线的报文传输和结构报文类型 在CAN2.0B的版本协议中有
2014-04-18 16:36:30
控制芯片自动完成。 仲裁场、控制场、数据场由软件编程配置SJA1000完成;帧起始、CRC场、应答场、帧结束由CAN总线控制芯片SJA1000自动完成。 十、CAN的数据错误检测: 不同于其它总线
2017-10-19 11:12:46
主动错误帧:用于发送节点或接收节点检测出错时向其他节点通知错误的帧。CAN总线一般存在五种错误:CRC错误、格式错误、应答错误、位发送错误、位填充错误。5. 下图是CAN过载帧:用于接收节点通知发送节点
2021-05-13 06:00:00
常有用。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证
2015-11-05 17:17:31
Kb/s以下);6)通信速率最高可达1 Mb/s(此时通信距离最长为40 m);7)每帧信息都有CRC校验及其他检错措施,保证了数据出错率极低;8)CAN总线节点在错误严重的情况下具有自动关闭输出的功能,以使总线上的其 他节点的操作不受影响。
2011-07-12 15:33:41
标志进行标定。当任何节点检测出位错误、填充错误、形式错误或应答错误时,由该节点在下一位开始发送出错误标志。在CAN总线中,任何一个单元可能处于下列3种故障状态之一:错误激活状态
2011-07-12 20:54:26
发送具有同一标识符的数据帧。Ø 错误帧:任何单元检测到总线错误就发出错误帧。Ø 过载帧:过载帧用在相邻数据帧或远程帧之间的提供附加的延时。数据帧下图为基本的格式:CAN总线中有标准帧和扩展帧两种格式
2018-09-21 20:32:41
CAN 节点中设有错误检测、标定和自检等措施。检测错误包括多种方式,其中最常用、最有效的一种是 CRC 校验。CRC 序列由循环冗余校验码求得的帧检查序组成。为实现 CRC 计算,被除的多项式系数由
2018-12-24 10:28:14
DELIMITER)和ACK界定符(ACK DELIMITER)。此主题相关图片如下: 在CAN协议的错误检测部分有这样的描述:位错误:站单元在发送位的同时也对总线进行监视。如果所发送的位值与所
2018-07-02 05:22:54
CAN通讯总线竞争数据保护物理设计总线逻辑错误检测机制总线逻辑错误处理机制错误跟踪机制POWER PC芯片 CAN配置总线竞争总线竞争解决的是在同一时间,多个节点同时向总线发送消息的问题。解决的方法
2022-01-13 06:16:09
工作至关重要,试想一下倘若生产线设备发送的位置信息在传输过程出现了错误,轻则可能造成生产瘫痪,重则可能导致设备损坏甚至人员伤害。在CAN总线通信过程中CAN控制器具备完整的错误检测能力,其中包含:位错误
2019-09-25 15:41:50
目前在测试 nxp芯片can总线通信功能时出现一奇怪现象,在波特率为20k时,节点a以15ms时间间隔连续发送64帧数据过程中节点b发送一帧数据竞争无影响。当节点a以9ms间隔连续发送64帧数
2019-08-17 21:11:11
通信速率为125Kbps~1Mbps的高速通信标准,而ISO11519-2是针对通信速率为123Kbps以下的低速通信标准CAN有很多优点,比如多主控制,速度快,距离远,具有错误检测,恢复,连接节点
2021-08-05 06:41:08
远程帧来请求发送器发送数据,具有和数据帧同样的标识符。• 出错帧(Error Frame) 用来检测 CAN 总线数据传输过程中的错误。• 超载帧(Overload Frame) 用于提供当前和后续数据
2018-12-17 10:59:18
后放入 CRC 段发送。接收节点也对 CRC 计算区域进行 CRC 计算,并与收到的 CRC 域进行对比,若 CRC 对比结果有误则向总线发送错误帧,若对比结果正确则随后发送应答。ACK 段:含应答位
2021-12-27 19:05:53
SPI在通信的过程中如果设备地址错误还能正常通信吗
2023-10-13 06:25:08
,断电,拔掉跳线帽,使boot=0,重新上电,不可以与板1CAN通信,板子复位一次,可以与板1通信。(有的时候可能要复位好几次CAN才能通信)。4、通信过程中拔掉CAN总线,重新连接之后,可以通信
2018-08-19 06:26:26
)方案,CAN-FD继承了传统CAN总线的主要特性,使用改动较小的物理层,双线串行通信协议,依然基于非破坏性仲裁技术,分布式实时控制,可靠的错误处理和检测机制,在此基础上对带宽和数据长度进行优化,将逐步
2023-02-14 14:22:23
串口在通信的过程中怎么对数据进行校验
2023-10-11 07:13:25
对多点及全局广播等几种方式传送数据,无需专门的调度。• CAN 总线的数据采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果。• CAN 总线采用 CRC 检验并可提供相应的错误处理功能,保证了
2018-12-13 14:26:31
单片机要与上位机通过can总线进行通信,怎样构建硬件电路及程序编写,求各位大神指导啊……
2014-08-08 13:59:59
你好,我已经在DSPIC30F4011控制器和DSP德克萨斯控制器之间建立了通信。但我在通信过程中遇到了总线错误,如何解决。 以上来自于百度翻译 以下为原文 Hi I have
2018-09-03 16:24:26
,不会出现网络瘫痪,从而提高整个系统的稳定性。cAN协议采用CRc检验并可提供相应的错误处理功能,保证了数据通信的可靠性。同时,由于cAN总线的系统灵活,其节点可以在不要求现存节点及其应用层改变任何软件或硬件的情况下,接入cAN网络,大大提高了系统的可扩充的能力。
2023-09-19 06:45:45
该系统的硬件构成、芯片选择和组成原理, 对FPGA的控制程序进行了分析和设计; 实验结果表明, 系统完全满足CAN总线通信要求, 与以往基于单片机的CAN总线通信系统相比较, 降低了体积、重量和功耗, 具有优越性; 该设计已成功应用于星载电场仪的地面检测设备中。
2012-08-11 11:55:19
;压力传感器 SP30;CAN 总线;低频唤醒;汽车在高速行驶过程中,轮胎气压不足易导致爆胎。爆胎是引起交通事故的主要原因。轮胎压力检测系统(TPMS) 的作用是在汽车行驶过程中对轮胎气压进行实时检测,并
2009-05-17 11:55:19
如何在STM32CubeMX中进行串口通信的配置?
2021-12-13 06:27:04
如何在STM32CubeMX中进行串口通信的配置?
2022-02-18 07:34:03
如何在android中进行驱动呢?并输出dev和sys中的界面用程序调用呢?
2022-03-02 09:53:03
我的要求是进行ROM测试,以便在执行代码之前 CAN 验证没有数据损坏。 我在用户手册中找到了该部分(11.5.6.1 SRI ECC(安全获取路径)),但这会在代码获取过程中显示错误。 CAN 您提供任何替代方法。
2024-01-30 06:22:52
在开发板上有CAN总线,怎样来进行CAN总线的通信呢?希望能普及一下这方面的知识或者提供些相关的例程。如果有高手做过,请介绍一下开发的过程。
2019-09-30 04:35:02
的数据而被终止。 6 CAN可靠性为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。如果数据传输的可靠性足够高,或者残留下来的数据错误足够低的话,这一目标不难实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
2015-07-10 14:09:37
1.在CAN总线中存在5种错误类型,它们互相并不排斥,下面介绍一下它们的区别方式、产生的原因以及处理方法。l位错误,CAN网络某个节点在向总线发送一个位的同时也在监测总线,当检测到总线位的电平
2015-07-09 13:54:46
介绍CAN 总线及其通信协议J1939, 并设计基于CAN 总线的多ECU 通信平台的硬件结构; 阐述节点ECU 通信的软件设计方法,在仿真试验的条件下实现数据通信的功能。试验表明该平台运行
2009-04-15 09:49:53 22
22 CAN总线通信,不仅能够有效地提升整个电气控制系统的运作效率,降低使用成本和维修费用。而且,CAN通信协议采用CRC检验,可提供相应的错误处理功能,保证了数据通信的可
2022-08-30 16:20:15
介绍CAN 总线及其通信协议J1939, 并设计基于CAN 总线的多ECU 通信平台的硬件结构; 阐述节点ECU 通信的软件设计方法,在仿真试验的条件下实现数据通信的功能。试验表明该平台运行
2009-05-16 14:19:0828 本设计为光电稳定跟踪平台开发CAN 驱动,以实现CAN 总线上设备间的通信。分析了linux 下标准设备驱动机制和CAN 总线通信模型,给出了光电稳定跟踪平台中CAN 总线通信的硬件设计
2009-08-04 08:33:4830 摘要:介绍CAN总线及其通信协议J1939,并设计基于CAN总线的多ECN通信平台的硬件结构;阐述节点ECN通信的软件设计方法,在仿真试验的条件下实现数
2006-03-11 13:21:031634 
CAN总线通信电路
2008-10-14 13:59:176323 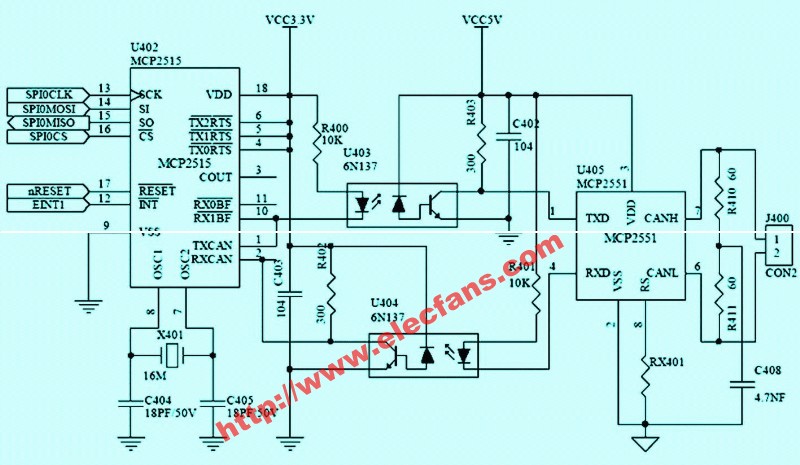
CAN总线在粮情自动检测系统中的应用
介绍基于CAN的粮情自动检测系统的设计,着重讨论了利用CAN总线进行通信的通信规程。 关键词:粮情;自动检测
2009-05-26 16:20:03904 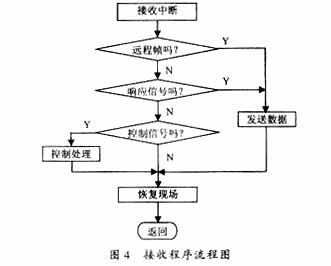
向总线送出一位的某个节点同时也在监视总线,当监视到总线位的电平与送出的电平不同时9则在该位时刻检测到一个位错误。
2011-08-08 14:01:2011171 为了解决在工业生产中遇到的现场检测信息的采集、处理和同步等问题,提出了实现过程分析仪器CAN 总线网络通信的方法。根据项目的设计要求,制定了适用的CAN 应用层协议,编写了各
2011-10-12 14:29:302279 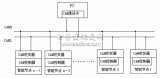
设计了多个CAN总线的通信节点,通过PCI9810-CAN适配卡上的CAN总线,组成一个局域通信网络,实现了PC机对各个节点的监控和通信以及节点间的自由通信。
2011-10-19 14:57:5667 基于对CAN 总线控制器的功能分析, 并应用Verilog语言进行软件设计, 从而实现CAN节点之间的通信功能。
2012-04-28 09:56:5413818 
基于CAN总线系统结构构成,通过工程实践的具体应用以及对CAN控制器及收发器硬件结构的深入理解,并从通信的角度出发着重深入分析了CAN总线通信的节点同步机制、总线地址机制、总
2012-05-08 15:23:04404 crc校验原理 利用CRC进行检错的过程可简单描述为:在发送端根据要传送的k位二进制码序列,以一定的规则产生一个校验用的r位监督码(CRC码),附在原始信息后边,构成一个新的二进制
2012-09-05 09:26:4734153 
CAN总线通信详解。
2016-03-30 16:46:100 基于CAN总线智能检测仪的设计_吴文珍
2017-01-21 12:21:100 局部错误,全局通知是CAN总线错误类型中较为典型的一种,如何通过错误报文及波形快速定位错误原因呢?本文结合现场实测案例简要分析。 一、CAN总线错误简介 在CAN总线中存在5种错误类型,如图1所示
2017-11-08 10:48:573 CAN-bus是实时性很强的总线,多主机广播式结构,自动优先级仲裁,具有传输错误自动重发,自动CRC校验接收,错误率小于10-9的特点。
2017-12-26 15:14:0518 局部错误,全局通知是CAN总线错误类型中较为典型的一种,如何通过错误报文及波形快速定位错误原因呢?本文结合现场实测案例简要分析。
2018-02-16 07:57:006974 
本文主要介绍了CAN总线远程帧和错误帧,首先我们先来了解了解一下通讯时使用的帧类型有哪些,他们的作用又是什么,具体的跟随小编一起来了解一下吧。
2018-05-07 11:30:2125382 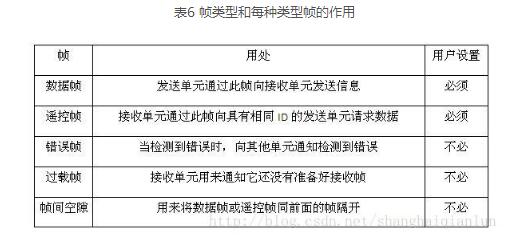
本文主要介绍的是遥控器集成检测系统检测CAN总线遥控器操作过程,具体的步骤跟随小编一起来了解一下。
2018-05-07 17:46:246493 你了解CAN总线吗?你知道总线中有哪些错误吗?你想了解总线中的错误是如何校验以及错误之间的关系吗?下文为大家揭开它神秘的面纱。
2018-06-26 10:29:2728435 
在理解了CAN总线的自通信程序后,再来探讨CAN总线间的相互通信变得容易了许多。对于是自通信还是相互通信,这个肯定是需要对寄存器进行必要的设置 的,分析PIAE的两个程序后不难发现,自通信和互通信
2018-09-21 15:06:021466 此CAN总线上有干扰,导致CAN控制器发生接收错误,CAN总线上的信号经过收发器转化为差分电平信号,此时信号容易受到外界干扰,这样容易使CAN控制器发生接收错误。
2018-10-08 14:31:514590 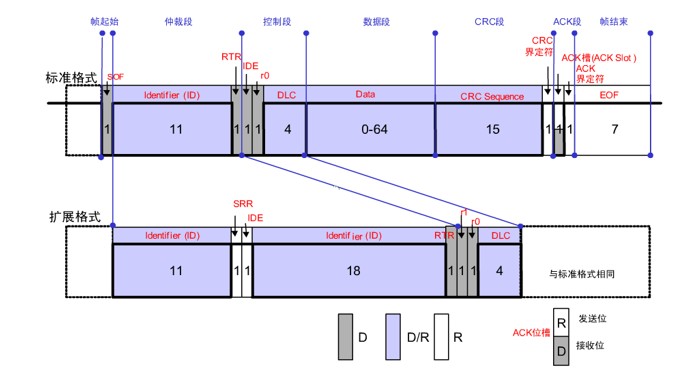
CAN总线边沿时间会影响采样正确性,而采样错误会造成错误帧不断出现,影响CAN总线通信。
2018-11-23 14:04:277540 
应用于安防系统对家居智能化发展起到了良好的促进作用。CAN总线是一种应用较为广泛的现场总线,它支持多主节点,有完善的错误处理机制,通信速率快,传送距离远,可挂接控制设备多。
2019-05-15 18:09:002 CRC 校验是一种在数据通信系统和其它串行传输系统中广泛使用的错误检测手段。通用的CRC 标准有CRC-8、CRC-16、CRC-32、CRC-CCIT,其中在网络通信系统中应用最广
2019-08-06 16:39:1436 本文档的主要内容详细介绍的是CAN总线基础的详细资料概述包括了:概述,汽车总线与CAN标准,CAN的通信机制,数据帧,错误检测与错误帧,CAN的帧格式,位定时与同步
2019-11-29 15:31:20105 本文在分析can总线航天应用的基础上,从硬件原理设计、cpu与can总线接口实现以及can总线通信软件设计等方面进行了论述。
2020-04-02 09:53:062836 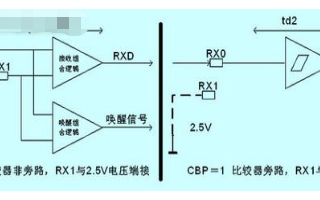
为获得安全的数据发送,CAN总线采取错误检测和处理的措施,在报文传输过程中设有位错误、填充错误、CRC错误、格式错误和应答错误5种错误类型,对于故障的界定有“错误激活”、“错误认可”和“总线关闭”3种状态。
2020-04-04 10:44:00969 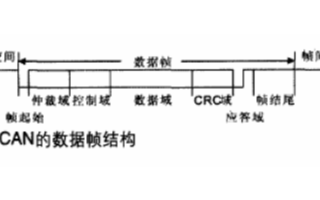
传统CAN以及目前CAN FD采取的校验机制,保证传输过程中遭受破坏的帧数据几乎不会被接收以及应答成功,能有效防止物理层传输错误,让用户界面不需要额外关注帧传输数据的正确性。
2020-12-26 02:32:251116 CRC 序列包括发送器的CRC 计算结果。接收器计算CRC 的方法与发送器相同。如果计算结果与接收到CRC 序列的结果不相符,则检测到一个CRC 错误。
2021-04-02 11:17:492472 
CAN总线通信协议详细如下。
2021-04-19 16:54:3875 CAN总线在COD检测中的应用说明。
2021-04-19 17:17:477 在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN节点错误状态,并通过实际的应用测试生成并记录CAN错误。
2022-05-27 17:56:122636 在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN节点错误状态,并通过实际的应用测试生成并记录CAN错误。
2022-06-13 16:08:347206 在本文中将继续为大家深入讲解CAN总线的位填充机制、错误检测和故障界定、网络拓扑、终端匹配、电缆与接线、差分信号电压幅值。
2023-02-09 11:05:201039 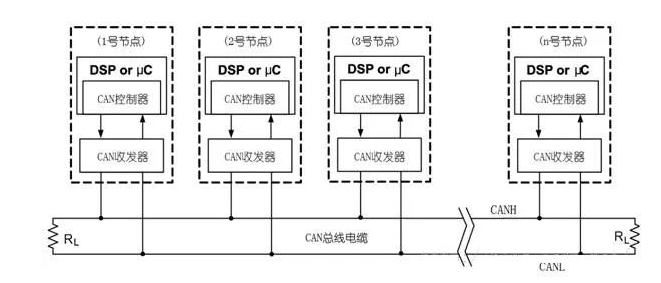
节点的硬件接口电路。基于对CAN 总线控制器的功能分析, 并应用Verilog语言进行软件设计, 从而实现CAN节点之间的通信功能。 0 引言 CAN 总线允许高达1M bit /s通讯速率, 支持多主通讯模式, 有高抗电磁干扰性而且能够检测出通信过程中产生的任何错误, 已被广泛应用到各自动
2023-06-18 11:15:011796 错误帧种类分为5种,分别是:位发送错误、ACK错误、位填充错误、CRC错误、格式错误。
2023-06-19 17:25:332455 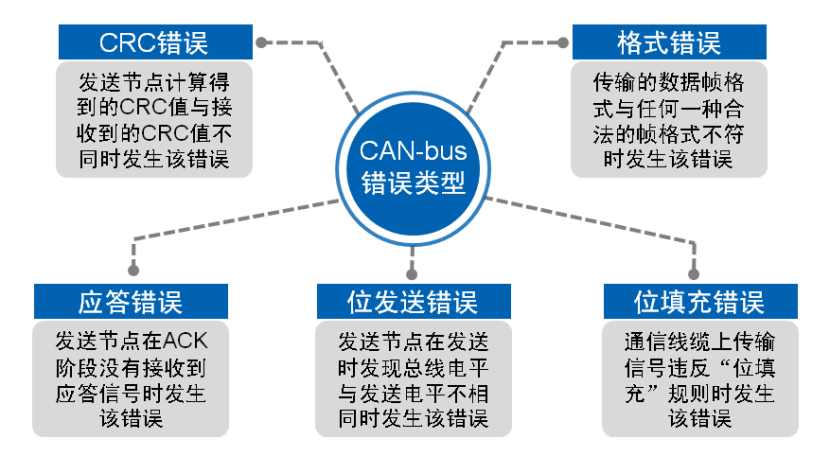
AsimpleintrotoCANerrorsCAN总线错误介绍在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN
2022-06-09 09:46:531176 
AsimpleintrotoCANerrorsCAN总线错误介绍在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN
2022-06-09 09:46:031410 AsimpleintrotoCANerrorsCAN总线错误介绍在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN
2022-05-27 10:39:213329 AsimpleintrotoCANerrorsCAN总线错误介绍在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN
2022-06-02 09:41:24813 AsimpleintrotoCANerrorsCAN总线错误介绍在本系列文章中,我们将为您详细介绍CAN总线错误的相关知识,包括CAN总线错误的基础概念、CAN总线错误的类型、CAN错误帧和CAN
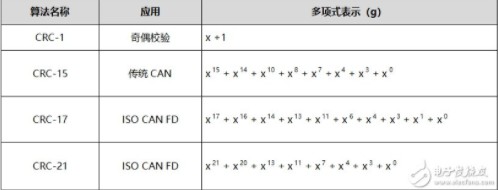
2022-06-09 10:21:001083 :不同数据段长度选择不同的CRC多项式传统CAN采用的是15位的CRC校验,由于CANFD支持更大的数据量,为提供通信可靠性,针对不同长度的CANFD报文,调整其CRC
2022-07-21 16:26:07441 
错误帧的基础知识错误帧的作用错误帧是CAN总线用于进行错误通知的报文,可以将任何一个节点发现的错误通知给其他节点,包括发送节点;进而丢弃错误的报文,发送节点再进行报
2023-02-23 15:11:521671 
认识CAN 总线错误的第一步就是了解认识CAN 总线协议和它的具体功能,这样才能更容易地理解CAN 总线是如何去发现并解决错误的。
2023-08-14 15:18:463228 
中,每一个节点都有一个CAN控制器,CAN控制器通过内部寄存器和接口与CAN总线连接。其中,在CAN传输过程中,如果出现错误,会在CAN控制器内部错误寄存器中记录错误信息。因此,在使用STM32进行CAN接收/发送时,及时清零错误寄存器是非常重要的。 一、STM32的CA
2023-09-14 14:22:312419 功能失等。 这是因为相关数据或信息是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个网络系统瘫痪。 最为常见的故障症状是仪表板的显示异常,如下图所示。 在检修过程中,首先应查看具体的故障症状,根据故障症状
2023-09-14 16:30:071595 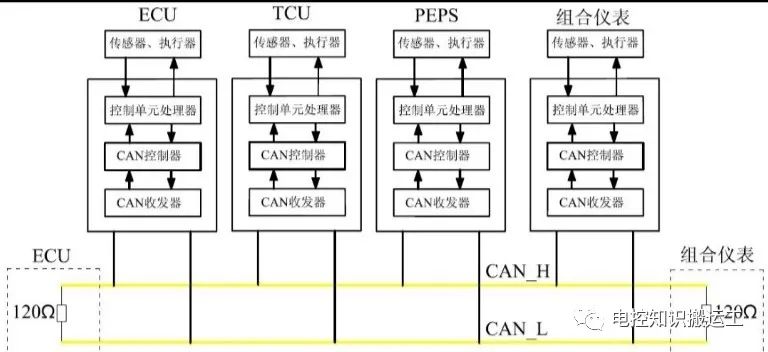
导读: CRC校验(循环冗余校验)是数据通讯中最常采用的校验方式。CAN协议中,总线通信节点也常采用CRC算法对各种总线传输的数据进行校验。CRC8校验在整车通信系统中应用比较广泛,鉴于此,本篇
2024-01-02 10:45:16169 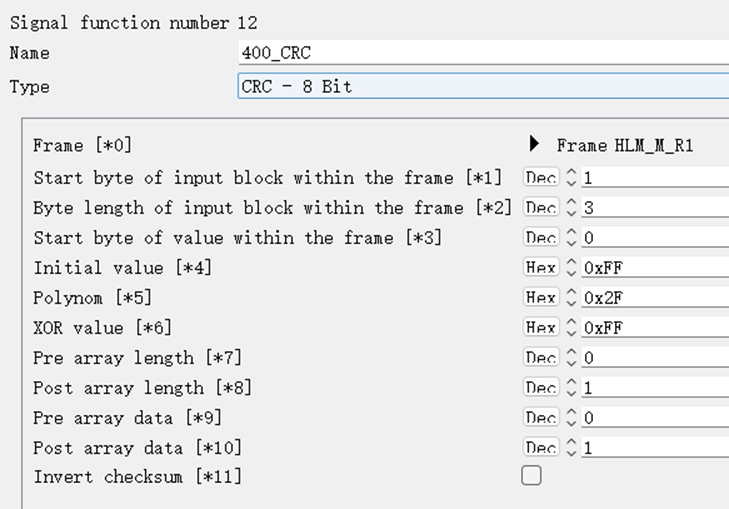
。而CAN 2.0B不仅支持CAN 2.0A的帧格式,还增加了错误检测和错误报告功能,最大传输速率可达到1 M
2024-01-31 14:09:01497
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论