在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速CAN总线和低速CAN总线,区别表如下所示。
2023-04-07 09:30:18 1836
1836 
“0”。CAN总线采用二进制不归零(NRZ)编码方式,所以总线上不是“0”,就是“1”。但是CAN协议并没有具体定义这两种状态的具体实现方式,如图7-7所示。 (10)故障界定(Confinement
2014-04-27 15:16:02
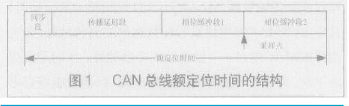
CAN总线通讯协议的每一帧可以看作一连串的电平信号,每一个电平信号代表一位(一个字节8位的位),所以一帧中包含了很多个位,由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一位又分为4段,同步段(SS)、传播时间段(PTS)、相位缓冲段 1(PBS1)、相位缓冲段 2(PB...
2021-08-20 07:43:39
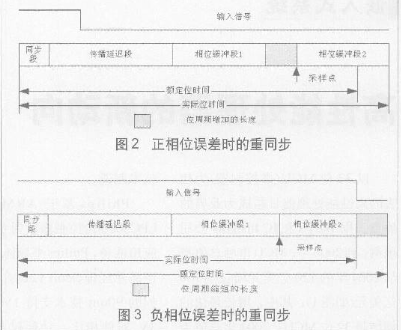
和重同步两种形式。它们遵从下列几条规则:在一个位时间内仅允许一种同步。 对于一个跳变沿,仅当它前面的第一个采样点数值与紧跟该跳变沿之后的总线值不相同时,才把该跳变沿用于同步。在总线空闲期间,若出现一个从
2018-12-18 14:51:33
CAN总线使用不归零(NRZ)的位填充。有两种不同的信令状态:显性(逻辑0)和隐性(逻辑1)。这些信令状态对应于所在物理层(存在几种不同的物理层)的某种电平。模块以线与逻辑连接到总线:哪怕只有一个节点发送逻辑0使得总线处于显性状态,那么不管有多少隐形状态的节点传送,则整个总线都处于显性状态。
2019-05-23 07:35:47
1开始之后收到,那么节点A就有可能采样到一个隐性位,导致产生一个位错误。这样的错误只有当两个节点都参与总线仲裁,且总线比较长,节点的振荡器频率相差较大时才会出现。另外,CAN总线还提供一种采样方式,即
2012-10-11 17:19:06
CAN协议与其它现场总线协议的区别中有一个是:它使用同步数据传输而不是异步传输(面向字符)。这意味着传输性能得到更有效的发挥,但是另一方面,这需要更加复杂的位同步方法。 在面向字符的协议中的位同步
2016-08-15 15:59:45
`CAN总线接口协议分析通过OSC482L进行CAN总线接口的分析,仪器可选多种测量方式,可以支持单线或双线方式测量。单线测试测量可以支持自动,CAN_H对地,CAN_L对地三种方式,双线差分方式
2020-08-19 09:27:19
是一种用在低速通信接口中的编码方式,同时提供同步和非同步两种方式。在非归零编码方式中,逻辑“1”在传输过程中用一位高电平表示,逻辑“0”用一位低电平表示。非归零编码方式如图 9-2 所示。9.总线数值在数
2018-12-14 14:37:44
“0”。CAN总线采用二进制不归零(NRZ)编码方式,所以总线上不是“0”,就是“1”。但是CAN协议并没有具体定义这两种状态的具体实现方式,如图7-7所示。 (10)故障界定(Confinement
2014-04-18 16:36:30
针对目前海事应用中液位遥测系统的现状,基于ARM9芯片的WinCE嵌入式开发平台,开发一套智能的液位遥测系统。该系统采用CAN总线,遵循CANopen协议,在EVC开发环境下结合多线程技术和数
2019-10-11 06:08:34
1.CAN的ISO[125k-1Mbps]/OSI[125bps-]参考模型的层次结构分为物理层和数据链路层。2.CAN报文帧格包含11位标识符的标准帧和29位标识符的扩展帧。3.微控制器
2022-01-11 06:50:05
CSMA/CD方式访问总线。当总线上有两个节点同时进行发送时,必须通过“无损的逐位仲裁”方法来使有最高优先权的的报文优先发送。在CAN总线上发送的每一条报文都具有唯一的一个11位或29位数字的ID
2017-10-19 11:12:46
CAN2.0A给出了CAN报文的标准格式,CAN2.0B给出了标准格式和扩展格式两种。CAN总线最高传输速率可达1Mbps(通信距离最长40m),如果降低传输速率,其直接通信的最远距离可达10km(速率
2021-05-13 06:00:00
集中化总线控制,所有主要通信,包括总线读取 (许可)控制,在系统中分几次完成。这是实现有较高可靠性的通信系统的唯一方法。2、CAN的报文格式在总线中传送的报文,每帧由7部分组成。CAN协议支持两种报文格式
2015-11-05 17:17:31
什么是CAN BUS中的仲裁字段。它是否用于识别CAN总线上的每个节点? CAN总线有两个信号,CAN高(CANH)和CAN低(CANL)。 在图中,CAN使用11位标识符,总共为211,即2048
2020-10-02 23:00:00
10km,无损位仲裁机制,多主结构。近些年来,CAN控制器价格越来越低。 Ø 低成本:ECUs通过单个CAN接口进行通信,布线成本低。 Ø 高集成:CAN总线系统允许在所有ECUs上进行集中错误诊断和配置。 Ø ...
2022-01-12 06:08:19
号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。具体的管教定义如下:信号表示CAN总线采用不归零码位填充技术,也就是说CAN总线上的信号有两种不同的信号状态,分别是显性
2018-09-21 20:32:41
必须是相同的。• 传输层描述了 CAN 总线协议的内核,它负责位时序(bit timing)、同步、仲裁、应答、错误探测等。• 对象层负责报文的过滤、状态和控制。• 应用层完成用户指定的数据传输任务。CAN 总线的物理层为数据通信提供了物理连接,而实际的数据通信在其他 3 层中完成。
2018-12-14 14:17:02
我们先简单总结一下CAN的错误处理与故障界定:1.CAN控制器记录发生在发送/接收过程中,总线数据出现错误的总数(位错误,CRC错误等)。2.CAN控制器根据总线出错数量由低到高,依次处于主动错误
2021-08-20 06:18:45
什么是CAN总线信号传输的位定时?什么是CAN总线信号传输的位同步?
2021-05-18 06:52:14
位时序逻辑实现 CAN 总线协议中对位同步的有关控制。位时序逻辑监视串行 CAN 总线并处理与总线相关的位时序。它在报文开始发送、总线电平从隐性值跳变到显性值时同步于 CAN总线上的位数据流(硬同步
2018-12-20 11:40:50
位时序包括正常位速率和正常位时间两个参数。• 正常位速率(Nominal Bit Rate):在非重同步情况下,借助理想发送器每秒发送的位数。• 正常位时间(Nominal Bit Time):正常
2018-12-17 11:13:33
CAN 总线的报文传输是通过 4 种不同类型的帧(Frame)来表示和控制的:• 数据帧(Data Frame) 用来在数据传输过程中携带数据。• 远程帧(Remoter Frame) 接收器发送
2018-12-17 10:59:18
can概念与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线。闭环总线
2021-08-20 06:14:27
款产品之间犹豫不定。华清远见提供了两种学习平台,一种是综合实验箱FS_6818B,板载资源比较多,可供实验的例程多,可适合物联网和嵌入式专业的深度研究和相关产品的开发。FS_6818B详细参数:功能部件
2016-10-26 15:47:11
两种不同结构的永磁永磁同步电机特点说明——表贴式和内置式永磁同步电机 spmsm 和 ipmsm 的区别总结永磁同步电机凸极性和隐极性面装式和内置式的关系结构特征当三相PMSM转子磁路的结构不同时
2021-06-28 09:55:37
两种采样方式.....................................
2013-08-08 15:04:02
) xCH. FS CAL. REG. 200000h
请问 ADC result 与输入电压 是什么关系?
在16位和24位这两种不同的模式下,offset 校准寄存器的值的有效位数分别是多少位?
2023-12-19 06:25:44
AVR的两种位操作的比较(位域方式和移位宏方式) 测试环境如下: 硬件:AT90S2313 软件: WiinAVR gcc3.3-Os级优化(最小size)。 说明: 由于AVR不支持位操作,所以
2016-09-06 10:24:13
AVR的两种位操作的比较(位域方式和移位宏方式)AVR的两种位操作的比较(位域方式和移位宏方式) 测试环境如下: 硬件:AT90S2313 软件: WiinAVR gcc3.3-Os级优化(最小
2019-04-16 03:41:20
有些信息在存储时,并不需要占用一个完整的字节, 而只需占几个或一个二进制位。例如在存放一个开关量时,只有0和1 两种状态, 用一位二进位即可。为了节省存储空间,并使处理简便,C语言又提供了一种数据结构
2013-12-10 20:35:00
校验是发送器根据发送的比特计算校验值,并在CAN帧结构CRC字段中提供该结果。接收器使用相同的多项式来计算总线上所见位的校验值,将自我计算的校验值与接收的校准值进行比较,如果匹配,则认为帧被正确接收
2019-09-25 15:41:50
汽车电子总线设计,一般都采用LIN总线和CAN总线这两种形式。 LIN总线的应用 LIN总线,一般用在结构、功能简单,实时性要求低和成本敏感的场合。比如,电动门窗、天窗、雨刷、车灯、空调
2021-02-20 16:26:24
MSP430单片机上的SPI总线的实现方式分为两种:硬件实现和软件实现。二者的抽象层次不同,硬件实现方式下程序员只需要完成总线协议的寄存器层,即一字节(char,8位二进制)数据,而软件实现方式下
2021-11-29 07:54:47
Matlab提供的两种聚类分析提供源程序代码
2020-04-29 11:21:37
SQL语言的两种使用方式在终端交互方式下使用,称为交互式SQL嵌入在高级语言的程序中使用,称为嵌入式SQL―高级语言如C、Java等,称为宿主语言嵌入式SQL的实现方式源程序(用主语言和嵌入式SQL
2021-12-20 06:51:26
MCU是野火的STM32H743挑战者,例程基于野火的《CAN双机通信》;位时序分解STM32 的 CAN 外设位时序中只包含 3 段,分别是同步段 SYNC_SEG、位段 BS1 及位段 BS2
2021-08-11 09:10:55
是用库函数配置的程序小片段:CAN_FilterNumber =CAN_FilterNumber_0;//注意这是的模式是跟 IdMask 例不一样的 相信看到这是你对这两种工作模式有一定的了解了吧!。 好了,例子就说完了,8 位 16 位的位宽是相似的,和上面的分析是一样的。
2016-08-19 16:28:04
两种方式:a、$ find / -name mysql–print 查看是否有mysql文件夹b、$ netstat -a –n 查看是否打开3306端口
2019-07-26 07:46:06
;物理层: 决定了位编码方式(NRZ编码,6个位插入填充位),位时序(位时序、位的采样)、同步方式(根据同步段ss实现同步,并具有再同步功能);但具体的说:信号电平,通信速度,采样点,驱动器和总线
2015-01-22 16:12:04
[zju嵌入式]树莓派之远程桌面 之前两篇介绍了通过串口和ssh登陆到树莓派的方法,这两种方式的有点在于连接方面,响应速度快,但是也有不够直观的缺点,没办法看到图形界面.在这篇博文中,笔者将介绍vnc和xrdp两种远程连接的方式你需要一台能上网的树莓派以及...
2021-12-24 07:54:35
总线上的数据采用不归零编码方式(NRZ),可具有两种互补的逻辑值之一:显性及隐性。CAN总线中各节点使用相同的位速率。它的每位时间由同步段、传播段、相位缓冲段1及相位缓冲段2组成。发送器在同步段前改变
2016-11-06 17:00:51
`CAN总线接口协议分析通过OSC482L进行CAN总线接口的分析,仪器可选多种测量方式,可以支持单线或双线方式测量。单线测试测量可以支持自动,CAN_H对地,CAN_L对地三种方式,双线差分方式
2020-06-27 12:11:46
CSMA(载波侦听多路访问),而光纤信号的传输则是单向的,因此最简单实用的方法是在某些总线支路上采用光纤介质,整个CAN网络为双绞线和光纤两种传输介质混合使用的方式。结构如图2所示。 作为传输介质,光纤
2018-12-04 10:41:09
络,网络中的各节点都可根据总线访问优先权采用无损结构的逐位仲裁的方式竞争向总线发送数据,且CAN协议废除了站地址编码,而代之以对通信数据进行编码,这可使不同的节点同时接收到相同的数据,这些特点使得CAN...
2021-08-23 08:31:57
总线和处理与总线有关的位时序。它在信息开头的“帧起始”位传输时同步CAN 总线位流(硬同步),接收信息时再次同步下一次传送(软同步)。位时序逻辑模块提供了可编程的时间段,用于补偿不同总线控制器的时钟
2012-12-21 15:57:48
串口通信由两种方式,第一种就是用微机原理课上学过的TX和RX两个接口进行通信。不过根据去年的经验,这个板子直接用TX和RX两个接口进行通信容易被烧坏,所以我们就用更简单的u***通信。在发stm32
2021-08-24 06:59:39
两种编程方式(I/O和MM)一、MM编程1.MM编程实际是存储器映射编程,直接操作寄存器。这种编程是操作外部扩展RAM(随机存取存储器)的一种编程方式,可通过配置跳线J13。2.51单片机内核有16
2022-02-24 07:32:37
CAN里有一个位同步的概念,我以前用STM32时,还有专门用于做位同步的结构体请问我现在用FPGA作CAN,需不需要设计位同步?还是外接的独立CAN控制器自己本身就有位同步
2018-10-10 09:35:45
关于CAN总线位定时和同步机制的简要分析
2021-05-28 06:05:24
宝来车CAN总线的组成与结构宝来车驱动系统CAN总线宝来车CAN总线可靠性分析
2021-05-12 06:30:06
关于数码管的两种使用方式-共阴共阳及138译码器初学51的时候记得学习数码管,那时候用的是郭天祥的51单片机c语言的教程,书上对数码管的编写是用段选和位选,但在后面的使用中发现有的开发板上根本没有
2022-02-23 06:59:52
”的呢? 取决于Internal Data Bus Width 内部数据总线宽度。 目前MCU有两种架构: 1.冯·诺依曼结构(Von-NeumannArchite...
2021-11-25 08:01:20
的CAN总线拓扑结构,如图所示,所有的节点都连接到同一总线上,在总线的两端分别需要一个120Ω的电阻。直线拓扑的优点:
2019-10-24 14:24:24
经常会在DCDC芯片规格书中遇到电源的整流方式,有的是异步整流有的是同步整流。这两种整流方式有什么不同呢,各自又有什么优缺点呢?
2019-03-12 14:05:44
处理器与外部通信的两种方式并行通信数据各个位同时传输,速度快,占用引脚资源多串行通信数据按位顺序传输,占用引脚资源少,速度相对比较慢1.按照数据传送方向可以分为:单工:数据传输只支持在一个方向
2021-08-18 08:06:00
如何同步S32K118的can总线?我使用 can_pal_s32k118 的示例,但 ESR1 寄存器 指示 Flexcan 未同步到 CAN 总线。
2023-05-24 10:12:10
信息。自同步法又可以分为两种,即开环同步法和闭环同步法。开环法采用对输入码元做某种变换的方法提取位同步信息。闭环法则用比较本地时钟和输入信号的方法,将本地时钟锁定在输入信号上。闭环法更为准确,但是也更为复杂。那么,我们该怎么利用FPGA设计提取位同步时钟DPLL?
2019-08-05 06:43:01
采用具有24位∑-△型A/D转换器的系统级单片机MSC1210结合低成本的供电解决方案与CAN控制器SJA1000以及CAN总线收发器82C250,设计一种具有CAN总线接口的24位称重数据采集系统,可应用于组合称重设备、选别设备。
2021-04-14 06:15:25
PCA82C200,具有和它完全兼容的引脚和协议CAN2.0A,二者可以替换。另外,它还支持总线扩展协议集CAN2.0B。它有两种工作模式:基本模式和扩展模式。在基本模式下,它有32个工作寄存器,而在扩展模式下
2019-06-11 05:00:04
- 帧起始,显性(逻辑0)表示报文的开始,并用于同步总线上的节点。· 标识符 - 标准CAN具有11位标识符,用来确定报文的优先级。此域的数值越小,优先级越高。· RTR - 远程发送请求位,当需要
2021-03-23 08:30:00
控制器引脚兼容及电气兼容;②SJA1000有两种工作模式:基本CAN模式(BASIC CAN)和增强CAN模式(PELI CAN),支持CAN2.0A/B协议;③同时支持11位和29位ID,位速率可达
2015-08-17 14:21:59
本文说的CAN即是一种总线,也是一种协议。因此,我们常听见CAN总线,也常听见CAN协议。CAN协议和CANOpen协议是两套不同的协议。从软硬件层次来划分,CAN协议属于硬件协议,而CANOpen
2018-10-10 09:53:40
工业过程控制设备和监控设备之间的互联。是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。主要应用于汽车电子控制系统、电梯控制系统、安全监控系统
2020-07-08 15:34:41
帧同步通常采用的方法有逐位调整法和置位调整法,对比分析哪个好?采用置位调整法设计帧同步系统
2021-04-14 06:34:56
CAN总线的位时序与参数设置@ [TOC]CAN的位时序构成CAN总线的每个位(Bit)的周期 Tbit = 1 / Baudrate。根据CAN规范,每个位的时间内又可细分成4段:同步段
2021-08-20 06:38:55
本文主要研究了一种基于FPGA、自顶向下、模块化、用于提取位同步时钟的全数字锁相环设计方法。
2021-05-06 08:00:46
DDS的基本原理是什么,有什么性能指标?基于FPGA的DDFS与DDWS两种实现方式
2021-04-30 06:13:06
FlexRay是一种高速可确定性的,具备故障容错的汽车总线系统。如今大多数汽车中主要是通过CAN总线进行数据交换,新的x-by-wire系统设计思想的出现,也导致了车辆系统对信息传送速度尤其是故障容错
2020-06-12 07:00:00
控制器有两种唤醒方式,一个是硬线唤醒,通过IGN线实现对控制器的上电;另一种是通过接收CAN信号来实现对控制器上电。请问这两种方式的优劣?不胜感激。。。
2018-10-11 14:51:19
1.在CAN总线中存在5种错误类型,它们互相并不排斥,下面介绍一下它们的区别方式、产生的原因以及处理方法。l位错误,CAN网络某个节点在向总线发送一个位的同时也在监测总线,当检测到总线位的电平
2015-07-09 13:54:46
编译环境的两种搭建方式putty工具的使用winscp工具的使用
2020-12-22 08:00:33
,请问位速率是不是跟比特率一个意思?在协议中提到时间份额Tq,时间份额Tq是怎么来的,是CAN总线时钟频率的倒数吗?请大神帮我解答,谢谢
2018-08-06 19:51:31
您好!我们需要把tms320f28377d连接16位异步RAM(双口RAM)。发现地址总线连接方式有两种如下图。请问这两种接法有何差异,都能正常使用 吗?一种是28377手册上推荐的做法,EM1BA
2020-05-20 11:10:27
请问一下无线局域网的两种网络结构是什么?
2023-05-09 16:22:11
在pcb设计过程中,电源分配方式有两种:总线方式和电源层方式,谁能告诉我这两种方式的具体含义吗?
2019-08-05 23:00:18
我知道的小车转向常见的有两种方式,一种是通过舵机控制转向,另一种是通过控制两个轮子的转速,通过转速差实现转向,这两种方式各有什么优缺点呢?
2019-05-21 02:37:26
://url.elecfans.com/u/e0063cb1a0本文分析了逆变器的两种双环瞬时反馈控制方式——电流型准PWM控制方式和三态DPM电流滞环跟踪控制方式,介绍其工作原理,分析比较其动态和静态性能,并给出具体实现电路
2019-08-19 17:12:31
方便的实现如设置断点、单步执行、读写寄存器等调试 (8)快速灵活的变成方式,可通过JTAG和BSL两种方式向CPU内装在程序
2018-12-14 10:04:43
针对CAN总线传输距离问题的两种解决方案
2012-08-16 16:13:23
输的字节数可以是一个,也可以是多个。每传送一个字节后,都必须跟随一个应答位,并且先发送的数据位为最高位。在全部数据传送结束后主控制器发送终止信号。X1288有两种写操作方式,分别为单字节写或页面写。图
2011-04-21 09:33:06
基于CAN总线系统结构构成,通过工程实践的具体应用以及对CAN控制器及收发器硬件结构的深入理解,并从通信的角度出发着重深入分析了CAN总线通信的节点同步机制、总线地址机制、总
2012-05-08 15:23:04 404
404 CAN总线用户接口简单,编程方便。网络拓扑结构采用总线式结构。这种网络结构简单、成本低,并且采用无源抽头连接,系统可靠性高。通过CAN总线连接各个网络节点,形成多主机控制器局域网(CAN)。信息的传输采用CAN通信协议,通过CAN控制器来完成。
2018-11-28 17:16:0317438 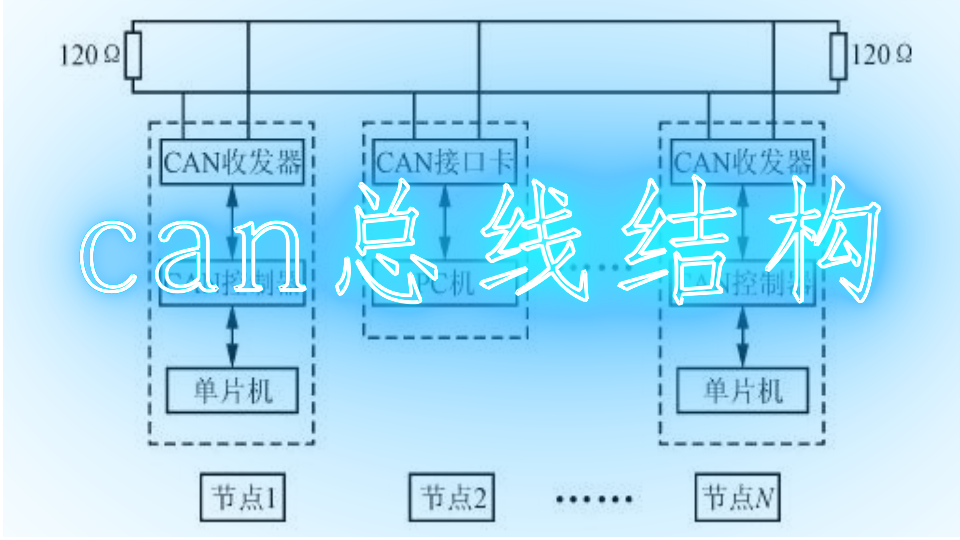
CAN总线一直以来以稳定、容错性高而著称。要想达到这样的效果,其独特的同步机制是非常重要的一点,本文将为大家讲解一下CAN总线的同步机制以及SJW的作用所在。
2020-12-26 02:52:08957 CAN总线采用分布式冲突检测与非破坏性位定时的技术原理,通过总线上的节点共享传输媒介(如双绞线)进行通信。EtherCAT则基于以太网技术,使用主从结构和主站广播的方式,在一个以太网帧内实现了多个从站设备的同步通信。
2023-06-28 16:28:576965 高速CAN总线和低速CAN总线的特性 高速CAN总线和低速CAN总线是两种常见的CAN总线类型。它们在数据传输速率、最大电缆长度、适用场景等方面存在一些差异。下面将详尽、详实、细致地介绍这两种CAN
2024-01-31 14:09:01497
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论