 电子发烧友App
电子发烧友App


作为一个轻量级的操作系统,FreeRTOS提供的功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能等,可基本满足较小系统的需要。FreeRTOS内核支持优先级调度算法,每个任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行。FreeRT0S内核同时支持轮换调度算法,系统允许不同的任务使用相同的优先级,在没有更高优先级任务就绪的情况下,同一优先级的任务共享CPU的使用时间。
FreeRTOS的内核可根据用户需要设置为可剥夺型内核或不可剥夺型内核。当FreeRTOS被设置为可剥夺型内核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样可保证系统满足实时性的要求;当FreeRTOS被设置为不可剥夺型内核时,处于就绪态的高优先级任务只有等当前运行任务主动释放CPU的使用权后才能获得运行,这样可提高CPU的运行效率。
2 FreeRTOS操作系统的原理与实现
2. 1任务调度机制的实现
任务调度机制是嵌入式实时操作系统的一个重要概念,也是其核心技术。对于可剥夺型内核,优先级高的任务一旦就绪就能剥夺优先级较低任务的CPU使用权,提高了系统的实时响应能力。不同于μC/OS-II,FreeRTOS对系统任务的数量没有限制,既支持优先级调度算法也支持轮换调度算法,因此FreeRTOS采用双向链表而不是采用查任务就绪表的方法来进行任务调度。系统定义的链表和链表节点数据结构如下所示:

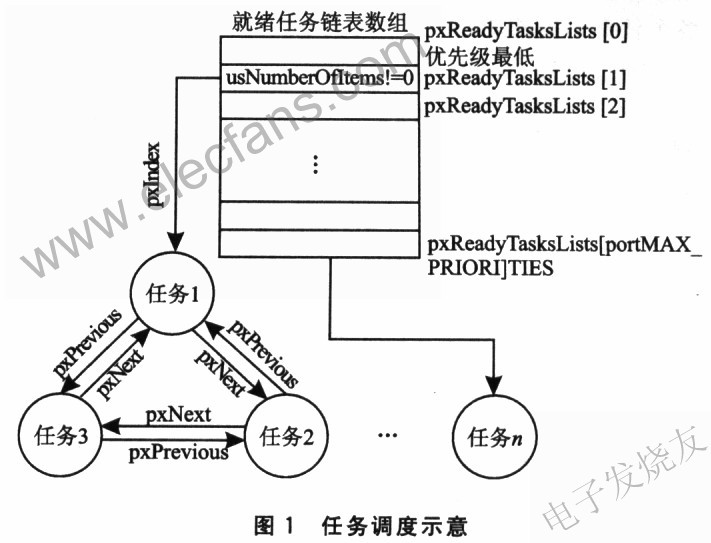
FreeRTOS定义就绪任务链表数组为xList pxReady—TasksLists[portMAX_PRIORITIES]。其中portMAX_PRIORITIES为系统定义的最大优先级。若想使优先级为n的任务进入就绪态,需要把此任务对应的TCB中的结点xGenericListltem插入到链表pxReadyTasksLiStS[n]中,还要把xGenericListItem中的pvContainer指向pxReadyTasksLists[n]方可实现。
当进行任务调度时,调度算法首先实现优先级调度。系统按照优先级从高到低的顺序从就绪任务链表数组中寻找usNumberOfItems第一个不为0的优先级,此优先级即为当前最高就绪优先级,据此实现优先级调度。若此优先级下只有一个就绪任务,则此就绪任务进入运行态;若此优先级下有多个就绪任务,则需采用轮换调度算法实现多任务轮流执行。
若在优先级n下执行轮换调度算法,系统先通过执行(pxReadyTasksLists[n])→pxIndex=( pxReadyTasks-Lists[n ]) → pxlndex→pxNext语句得到当前结点所指向的下一个结点,再通过此结点的pvOwner指针得到对应的任务控制块,最后使此任务控制块对应的任务进入运行态。由此可见,在FreeRTOS中,相同优先级任务之间的切换时间为一个时钟节拍周期。
以图1为例,设系统的最大任务数为pottMAX_PRIORITIES,在某一时刻进行任务调度时,得到pxReadyTasksLists[ i].usNumberOfItems=O(i=2...portMAX_PRIORITIES)以及pxReadyTasksLists。usNumberOfItems=3。由此内核可知当前最高就绪优先级为l,且此优先级下已有三个任务已进入就绪态.由于最高就绪优先级下有多个就绪任务,系统需执行轮换调度算法实现任务切换;通过指针pxlndex可知任务l为当前任务,而任务l的pxNext结点指向任务2,因此系统把pxIndex指向任务2并执行任务2来实现任务调度。当下一个时钟节拍到来时,若最高就绪优先级仍为1,由图可见,系统会把pxIndex指向任务3并执行任务3。
为了加快任务调度的速度,FrecRTOS通过变量ucTopReadyPriotity跟踪当前就绪的最高优先级。当把一个任务加入就绪链表时,如果此任务的优先级高于ucTopReadyPriority,则把这个任务的优先级赋予ucTopReadyPriority。这样当进行优先级调度时,调度算法不是从portMAX_PRIORIT
IES而是从ucTopReady-Priority开始搜索。这就加快了搜索的速度,同时缩短了内核关断时间。
2.2 任务管理的实现
实现多个任务的有效管理是操作系统的主要功能。FreeRTOS下可实现创建任务、删除任务、挂起任务、恢复任务、设定任务优先级、获得任务相关信息等功能。下面主要讨论FreeRTOS下任务创建和任务删除的实现。当调用sTaskCreate()函数创建一个新的任务时,FreeRTOS首先为新任务分配所需的内存。若内存分配成功,则初始化任务控制块的任务名称、堆栈深度和任务优先级,然后根据堆栈的增长方向初始化任务控制块的堆栈。接着,FreeRTOS把当前创建的任务加入到就绪任务链表。若当前此任务的优先级为最高,则把此优先级赋值给变量ucTopReadyPriorlty(其作用见2.1节)。若任务调度程序已经运行且当前创建的任务优先级为最高,则进行任务切换。
不同于μC/OS—II,FreeRTOS下任务删除分两步进行。当用户调用vTaskDelete()函数后,执行任务删除的第一步:FreeRTOS先把要删除的任务从就绪任务链表和事件等待链表中删除,然后把此任务添加到任务删除链表,若删除的任务是当前运行任务,系统就执行任务调度函数,至此完成任务删除的第一步。当系统空闲任务即prvldleTask()函数运行时,若发现任务删除链表中有等待删除的任务,则进行任务删除的第二步,即释放该任务占用的内存空间,并把该任务从任务删除链表中删除,这样才彻底删除了这个任务。值得注意的是,在FreeRTOS中,当系统被配置为不可剥夺内核时,空闲任务还有实现各个任务切换的功能。
通过比较μC/OS-II和FreeRTOS的具体代码发现,采用两步删除的策略有利于减少内核关断时间,减少任务删除函数的执行时间,尤其是当删除多个任务的时候。
2.3 时间管理的实现
FreeRTOS提供的典型时间管理函数是vTaskDelay(),调用此函数可以实现将任务延时一段特定时间的功能。在FreeRT0S中,若一个任务要延时xTicksToDelay个时钟节拍,系统内核会把当前系统已运行的时钟节拍总数(定义为xTickCount,32位长度)加上xTicksToDelay得到任务下次唤醒时的时钟节拍数xTimeToWake。然后,内核把此任务的任务控制块从就绪链表中删除,把xTimeToWake作为结点值赋予任务的xItemValue,再根据xTimeToWake的值把任务控制块按照顺序插入不同的链表。若xTimeToWake > xTickCount,即计算中没有出现溢出,内核把任务控制块插入到pxDelayedTaskList链表;若xTimeToWak e< xTickCount,即在计算过程中出现溢出,内核把任务控制块插入到pxOverflowDelayed-Taskust链表。
每发生一个时钟节拍,内核就会把当前的xTick-Count加1。若xTickCount的结果为0,即发生溢出,内核会把pxOverflowDelayedTaskList作为当前链表;否则,内核把pxDelaycdTaskList作为当前链表。内核依次比较xTickCotlrtt和链表各个结点的xTimcToWake。若xTick-Count等于或大于xTimeToWake,说明延时时间已到,应该把任务从等待链表中删除,加入就绪链表。
由此可见,不同于μC/OS—II,FreeRTOS采用“加”的方式实现时间管理。其优点是时间节拍函数的执行时间与任务数量基本无关,而μC/OS—II的OSTimcTick()的执行时间正比于应用程序中建立的任务数。因此当任务较多时,FreeRTOS采用的时间管理方式能有效加快时钟节拍中断程序的执行速度。
2.4 内存分配策略
每当任务、队列和信号量创建的时候,FreeRTOS要求分配一定的RAM。虽然采用malloc()和free()函数可以实现申请和释放内存的功能,但这两个函数存在以下缺点:并不是在所有的嵌入式系统中都可用,要占用不定的程序空间,可重人性欠缺以及执行时间具有不可确定性。为此,除了可采用malloc()和free()函数外,FreeRTOS还提供了另外两种内存分配的策略,用户可以根据实际需要选择不同的内存分配策略。
第1种方法是,按照需求内存的大小简单地把一大块内存分割为若干小块,每个小块的大小对应于所需求内存的大小。这样做的好处是比较简单,执行时间可严格确定,适用于任务和队列全部创建完毕后再进行内核调度的系统;这样做的缺点是,由于内存不能有效释放,系统运行时应用程序并不能实现删除任务或队列。
第2种方法是,采用链表分配内存,可实现动态的创建、删除任务或队列。系统根据空闲内存块的大小按从小到大的顺序组织空闲内存链表。当应用程序申请一块内存时,系统根据申请内存的大小按顺序搜索空闲内存链表,找到满足申请内存要求的最小空闲内存块。为了提高内存的使用效率,在空闲内存块比申请内存大的情况下,系统会把此空闲内存块一分为二。一块用于满足申请内存的要求,一块作为新的空闲内存块插入到链表中。
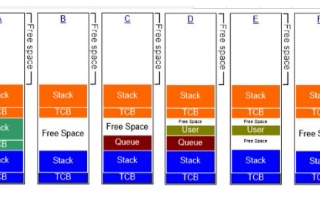
下面以图2为例介绍方法2的实现。假定用于动态分配的RAM共有8KB,系统首先初始化空闲内存块链表,把8KB RAM全部作为一个空闲内存块。当应用程序分别申请1KB和2KB内存后,空闲内存块的大小变为5KB3。2KB的内存使用完毕后,系统需要把2KB插入到现有的空闲内存块链表。由于2 KB<5KB,所以把这2 KB插入5KB的内存块之前。若应用程序又需要申请3 KB的内存,而在空闲内存块链表中能满足申请内存要求的最小空闲内存块为5KB,因此把5KB内存拆分为2部分,3KB部分用于满足申请内存的需要,2KB部分作为新的空闲内存块插入链表。随后1KB的内存使用完毕需要释放,系统会按顺序把1KB内存插入到空闲内存链表中。
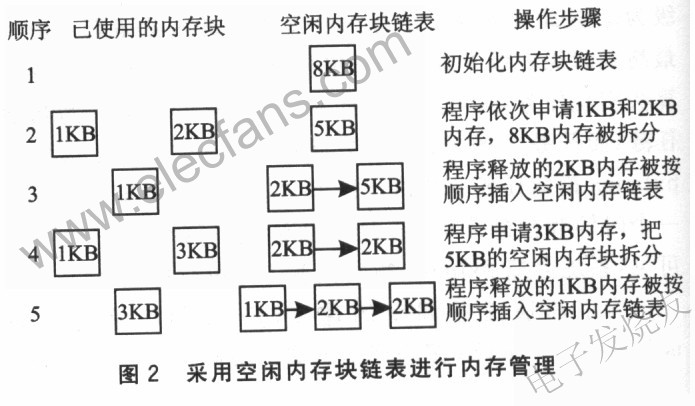
方法2的优点是,能根据任务需要高效率地使用内存,尤其是当不同的任务需要不同大小的内存的时候。方法二的缺点是,不能把应用程序释放的内存和原有的空闲内存混合为一体,因此,若应用程序频繁申请与释放“随机”大小的内存,就可能造成大量的内存碎片。这就要求应用程序申请与释放内存的大小为“有限个”固定的值(如图2中申请与释放内存的大小固定为l KB、2 KB或3 KB)。方法2的另一个缺点是,程序执行时间具有一定的不确定性。
μC/OS—II提供的内存管理机制是把连续的大块内存按分区来管理,每个分区中包含整数个大小相同的内存块。由于每个分区的大小相同,即使频繁地申请和释放内存也不会产生内存碎片问题,但其缺点是内存的利用率相对不高。当申请和释放的内存大小均为一个固定值时(如均为2 KB),FreeRTOS的方法2内存分配策略就可以实现类似μC/OS—Ⅱ的内存管理效果。
2.5 FreeRTOS的移植
FreeRTOS操作系统可以被方便地移植到不同处理器上工作,现已提供了ARM、MSP430、AVR、PIC、C8051F等多款处理器的移植。FrceRTOS在不同处理器上的移植类似于μC/0S一II,故本文不再详述FreeRTOS的移植。此外,TCP/IP协议栈μIP已被移植到FreeRTOS上,具体代码可见FreeRTOS网站。
2.6 FreeRTOS的不足
相对于常见的μC/OS—II操作系统,FreeRTOS操作系统既有优点也存在不足。其不足之处,一方面体现在系统的服务功能上,如FreeRTOS只提供了消息队列和信号量的实现,无法以后进先出的顺序向消息队列发送消息;另一方面,FreeRTOS只是一个操作系统内核,需外扩第三方的GUI(图形用户界面)、TCP/IP协议栈、FS(文件系统)等才能实现一个较复杂的系统,不像μC/OS-II可以和μC/GUI、μC/FS、μC/TCP-IP等无缝结合。
3 结 论
作为一个源码公开的操作系统,学习FreeRTOS可以更好地掌握嵌入式实时操作系统的实现原理;作为一个免费的操作系统,采用FreeRTOS可在基本满足较小系统需要的情况下降低系统成本、简化开发难度。在实践中,采用FreeRTOS操作系统和MSP430单片机构成的温度控制系统稳定可靠,实现了较好的控制效果。相信随着时间的发展,FreeRTOS会不断完善其功能,以更好地满足人们对嵌入式操作系统实时性、可靠性、易用性的要求。









 工商网监
工商网监
评论