 电子发烧友App
电子发烧友App


STM8的中断优先级
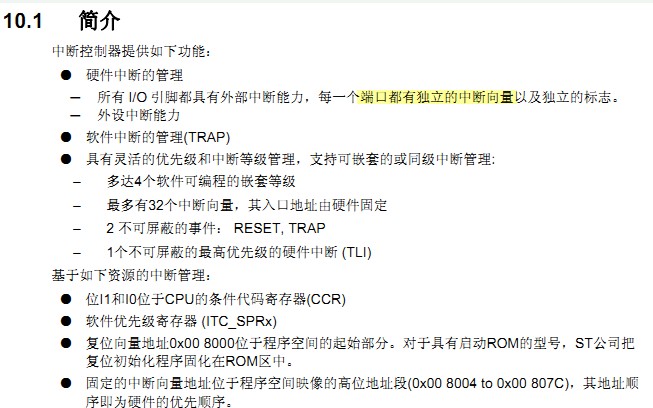
STM8S的中断由中断控制器(ITC)控制。STM8所有IO都支持中断,分为PA~PE 5个组,每组IO对应一个中断服务函数(也就是每组IO只有一个向量)。
STM8没有专门的中断状态寄存器,所以只能通过刚进入中断就读取IDR来判断,不过在某些情况下,此种方法就不好用了,所以在设计的时候就要考虑清楚,是不是会冲突。最好把有冲突的中断放到不同的组。STM8的外部中断采用软件优先级+硬件优先级的控制方法,来控制优先级分组。软件优先级优先于硬件优先级。
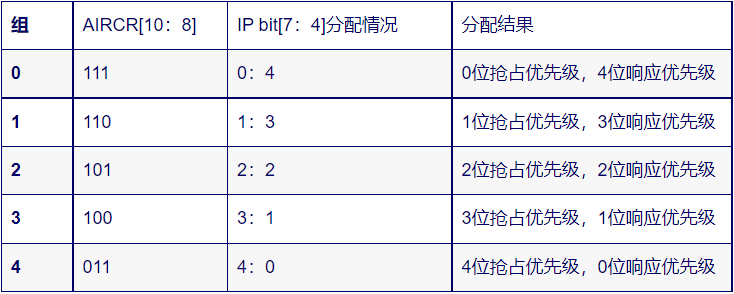
硬件优先级由向量号确定,向量号越小,优先级越高。STM8软件优先级设置可以分为4个等级(0~3),实际上可设置的就三个等级:1~3优先级顺序:0《1《2《3,3的优先级最高,高优先级的中断可以打断低优先级的中断
多个中断同时发生:在软件优先级相同的情况下,由硬件优先级决定谁先响应。但是硬件优先级不可打断。也就是相同软件优先级的中断,硬件优先级低的中断在执行了。此时来一个硬件优先级高的中断是不可以打断低优先级的中断的。
STM8还有个TLI外部中断,这个优先级可以打断软件优先级为3的中断,TLI的优先级不可设置。(基本就是最高级别了,除了RESET)
STM8S单片机的中断优先级设置
STM8S的中断由中断控制器(ITC)控制。STM8所有IO都支持中断,分为PA~PE 5个组,每组IO对应一个中断服务函数(也就是每组IO只有一个向量)。STM8没有专门的中断状态寄存器,所以只能通过刚进入中断就读取IDR来判断,不过在某些情况下,此种方法就不好用了,所以在设计的时候就要考虑清楚,是不是会冲突。最好把有冲突的中断放到不同的组。
STM8的外部中断采用软件优先级+硬件优先级的控制方法,来控制优先级分组。软件优先级优先于硬件优先级。硬件优先级由向量号确定,向量号越小,优先级越高如下面图中断映射,中断向量表。

STM8软件优先级设置可以分为4个等级(0~3),实际上可设置的就三个等级:1~3。优先级顺序:0《1《2《3,3的优先级最高,高优先级的中断可以打断低优先级的中断
多个中断同时发生:在软件优先级相同的情况下,由硬件优先级决定谁先响应。但是硬件优先级不可打断。也就是相同软件优先级的中断,硬件优先级低的中断在执行了。。。此时来一个硬件优先级高的中断是不可以打断低优先级的中断的。STM8还有个TLI外部中断,这个优先级可以打断软件优先级为3的中断,TLI的优先级不可设置。(基本就是最高级别了,除了RESET)。
stm8s中断优先级程序
//软件中断优先级设置函数
//vector:中断向量号(0~24)
//prio:优先级(1~3),禁止设置为0
//STM8的优先级分为软件优先级和硬件优先级,软件优先级优先于硬件优先级。
//硬件优先级由向量号确定,向量号越小,优先级越高。
//软件优先级可以通过本函数设置。
//STM8软件优先级设置可以分为4个等级(0~3),实际上可设置的就三个等级:1~3
//优先级顺序:0《1《2《3,3的优先级最高,高优先级的中断可以打断低优先级的中断
//多个中断同时发生:在软件优先级相同的情况下,由硬件优先级决定谁先响应。
void ITC_Set(u8 vector,u8 priority)
{
if(priority==0)return; //不能设置为优先级0
if(priority==2)priority=0; //优先级2:00B
if(vector《4)
{
ITC-》ISPR1&=~(3《《vector*2); //清除原来的设置
ITC-》ISPR1|=priority《《vector*2; //设置优先级
}else if(vector《8)
{
ITC-》ISPR2&=~(3《《(vector-4)*2); //清除原来的设置
ITC-》ISPR2|=priority《《(vector-4)*2; //设置优先级
}else if(vector《12)
{
ITC-》ISPR3&=~(3《《(vector-8)*2); //清除原来的设置
ITC-》ISPR3|=priority《《(vector-8)*2; //设置优先级
}else if(vector《16)
{
ITC-》ISPR4&=~(3《《(vector-12)*2); //清除原来的设置
ITC-》ISPR4|=priority《《(vector-12)*2;//设置优先级
}else if(vector《20)
{
ITC-》ISPR5&=~(3《《(vector-16)*2); //清除原来的设置
ITC-》ISPR5|=priority《《(vector-16)*2;//设置优先级
}else if(vector《24)
{
ITC-》ISPR6&=~(3《《(vector-20)*2); //清除原来的设置
ITC-》ISPR6|=priority《《(vector-20)*2;//设置优先级
}else if(vector《28)
{
ITC-》ISPR7&=~(3《《(vector-24)*2); //清除原来的设置
ITC-》ISPR7|=priority《《(vector-24)*2;//设置优先级
}else if(vector《32)
{
ITC-》ISPR8&=~(3《《(vector-28)*2); //清除原来的设置
ITC-》ISPR8|=priority《《(vector-28)*2;//设置优先级
}
}
//外部中断配置函数
//GPIO:0~5(对应GPIO_A~GPIO_E和TLI)
//TRIM:0~3(即00B~11B)
//00,下降沿和低电平触发
//01,仅上升沿触发
//10,仅下降沿触发
//11,上升沿和下降沿触发
void EXTI_Config(u8 GPIOx,u8 TRIM)
{
TRIM&=0X03; //取低2位有效
if(GPIOx《4) //GPIOA~D
{
EXTI-》CR1&=~(3《《GPIOx*2);
//清除原来的设置
EXTI-》CR1|=TRIM《《GPIOx*2;
//设置触发方式
}else if(GPIOx==GPIO_E)
//GPIOE
{
EXTI-》CR2&=~(3《《0);
//清除原来的设置
EXTI-》CR2|=TRIM;
//设置触发方式
}else if(GPIOx==GPIO_TLI)
//TLI触发方式设置
{
TRIM&=0X01;
//仅最低位有效。
EXTI-》CR2&=~(1《《2);
//清除原来的设置
EXTI-》CR2|=TRIM《《2;
//设置TLI触发方式
}
}










 工商网监
工商网监
评论