 电子发烧友App
电子发烧友App


研究基于S3C2440平台上的Vxworks BSP移植具有重要的意义。本文就BSP的概念、BSP移植过程中重点修改的几个文件、串口和网口驱动以及BSP的调试和仿真做详细的介绍。
BSP概述
VxWorks操作系统将所有硬件的功能函数分别放到一系列库中,这些库就被称为板级支持包BSP。BSP是连接VxWorks操作系统与硬件平台的一个接口软件包,在引导系统、支持系统运行过程中扮演着重要的角色,首先,通过BSP可以生成引导操作系统的bootrom;其次,引导行工程的建立基础就是BSP;最后,BSP具有与用户交互的作用,可以提供一个基础的硬件调试环境。BSP还可以使VxWorks运行于特定的硬件平台,如ARM、PPC、X86等,它包含了一系列与硬件相关的函数,完成针对硬件的基本输入与输出操作,可以使上层程序员在不用熟悉硬件的情况下进行编程。例如,一般它完成以下操作:目标板硬件初始化、内存控制器初始化、堆栈初始化、外围设备初始化(I/O、Interrupt……)、异常向量处理、CACHE操作、硬件设备的底层驱动、定时器驱动、串口驱动、END网络驱动、FLASH驱动、LCD驱动等。
BSP在嵌入式系统中扮演的角色,很类似于在PC系统中的BIOS和驱动程序的地位。图1中包括了VxWorks操作系统的各种组件,指明了BSP在整个系统中所处的地位和作用。
VxWorks在S3C2440上的BSP设计
S3C2440简介
移植目标机的硬件配置具体如下:处理器S3C2440,采用ARM920T内核,内存大小64M;NAND Flash大小为128M;
NOR Flash大小为2M;3路URAT;2路SPI;IIC总线接口;网卡:DM9000,10/100M的自适应。

图1 BSP在嵌入式系统中的位置框图
BSP的移植过程
要进行BSP的开发和设计,最好有一个可参考的模板,由于Samsung S3C2440A的内核是ARM920T,所以参考的模板选择Tornado for arm 的integrator920t。BSP文件主要在VxWorks编译环境Tornado的目录target/config/all和target/config/integrator920t文件夹中。其中,all文件夹里的文件对于绝大多数BSP都是共用的,一般来说不用怎么修改,重点是修改integrator920文件夹下的几个文件,这主要是指makefile、config.h、rominit.s和sysLib.c中相关部分的修改,另外添加了串口驱动和DM9000的网卡驱动。
修改Makefile文件
Makefile的两个主要功能就是提供文件之间的依赖关系和目标文件生成方法,定义编译和链接整个BSP的规则,在makefile文件中有一些参数已经在config.h文件中定义过了,但是必须保证两处的定义一致,否则会出现编译错误。下面介绍一些需要修改的参数:
CPU:描述目标板的处理器类型,设计中为ARMARCH4;
TOOL:该参数用来选择编译工具,VxWorks中可使用GNU和DIAB两种,设计中用GNU编译器来编译目标代码;
TGT_DIR:默认设置为$(WIND_BASE)/target;
TARGET_DIR:默认为BSP所在的目录,设计中为mini2440;
VENDOR:板卡生产商的名称,设计中为HITSAT;
BOARD:板卡的名称,设计中为OMU;
ROM_SIZE:ROM或Flash的大小(十六进制);
RAM_LOW_ADRS:VxWorks在RAM中的起始地址,即入口地址;
RAM_HIGH_ADRS:非驻留ROM内核的启动程序加载地址。关于入口地址和高位地址的指定需参考硬件的RAM组织。
该文件下其余的设置和定义都与模板中的一致。
修改config.h
config.h文件是BSP软件中比较重要的一个文件,VxWorks内核组件的配置可以通过config.h文件来定义。config.h文件包含了所有头文件和CPU相关的特殊定义,config.h文件中的配置参数是在configAll.h文件内容的基础上根据开发板的硬件资源设置的,其中包括定义引导行、修改存储空间的地址等。下面详细介绍config.h文件中修改的部分配置参数:
(1)定义引导行
#define DEFAULT_BOOT_LINE "dm(0,0) zwj-PC:d:\VxWorks h=192.168.0.1 e=192.168.0.2 u=zwjhjj pw=zwjfile tn=mini2440"
其中:dm(0,0)为boot device,即启动设备映像;
zwj-PC为host name,即主机名;
d:\VxWorks为file name,即要下载的VxWorks镜像文件路径;
h=192.168.0.1为主机IP地址;
e=192.168.0.2为目标板IP地址;
u=zwjhjj为FTP登陆时的用户名;
pw=zwjfile为FTP登陆时的密码;
tn=mini2440为目标板名称。
(2)修改地址
对目标板存储区配置参数的修改时一定要注意:该文件中地址定义,如ROM-TEXT-ADRS、ROM-SIZE、RAM-LOW-ADR、SRAM-HIGH-SIZE等要与Makefile文件中的相关定义一致。根据实际CPU以及外扩存储器的大小来确定目标板内存。
#define LOCAL_MEM_LOCAL_ADRS 0x30000000 / *RAM的起始地址*/
#define LOCAL_MEM_SIZE 0x04000000 /*RAM的大小为64M*/
#define ROM_BASE_ADRS 0x00000000 /*Flash的基地址*/
#define ROM_SIZE0x00100000 /*存VxWorks的Flash大小*/
#define ROM_COPY_SIZE ROM_SIZE
#define ROM_SIZE_TOTAL 0x00200000 /*Flash总大小*/
#define RAM_LOW_ADRS 0x30001000 /*VxWorks 映像的入口地址*/
#define RAM_HIGH_ADRS 0x32e00000 /*Bootrom在RAM中的起始地址*/
修改S3C2440x.h
该文件是自己添加的一个文件,其中包括处理器相关的外设寄存器结构、地址、外设中断号分配、串口等的设置。下面主要介绍一下该文件中对串口的定义:
/* s3c2440串口的定义*/
#define UART_XTAL_FREQ s3c2440x_PCLK
/*串口时钟频率*/
#define N_s3c2440x_UART_CHANNELS 3 /*串口通道数 */
#define N_SIO_CHANNELS N_s3c2440x_UART_CHANNELS
#define N_UART_CHANNELS N_s3c2440x_UART_CHANNELS
#define UART_0_BASE_ADR 0x50000000 /*串口0的基地址*/
#define UART_1_BASE_ADR 0x50004000/*串口1的基地址*/
#define UART_2_BASE_ADR 0x50008000/*串口2的基地址*/
另外又添加了一个s3c2440xSio.h文件,在该文件中定义了串口数据结构:
typedef struct s3c2440x_CHAN
{ SIO_CHAN sio; /* 标准SIO_CHAN结构 */
STATUS (*getTxChar) (); /*安装发送回调函数 */
STATUS (*putRcvChar) (); /*安装接收回调函数 */
void * getTxArg;
void * putRcvArg;
…….
UINT32 channelMode; /*当前模式(中断或轮询)*/
int baudRate; /*当前波特率*/
}
数据结构初始化之后,还有几个重要的函数需要注意:sysHwInit():处理器I/O端口的初始化;sysSerialHwInit():初始化设备描述符;sysSerialHwInit2():通过intConnect()把串口的中断处理程序s3c2440xIntTx、s3c2440xIntRcv连接接到相应的中断向量上,并由int Enable()开启两个中断,调用s3c2440xDevInit2()对_UCON寄存器赋值完成对串口的最终配置由轮询模式转换为中断模式,并在中断服务程序中实现串口数据的接收和发送。通过对这些功能函数的添加完成串口驱动的设计。
修改romInit.s
部分代码修改如下:
/*添加了对串行口UART的初始化,配置了UART的一些控制寄存器,并设置了波特率,部分代码如下*/
InitUART:
#define UART_BRD (( 50750000 / (115200 * 16)) - 1)
mov r2,#UART_BRD /*设置串口的波特率 */
/*初始化堆栈指针*/
ldr sp, L$_STACK_ADDR
mov fp, #0
在建立堆栈之后,系统就具备了高级语言的执行条件,后续的代码就可以用C语言来实现了。
/*使程序跳转至C语言程序段代码如下*/
#if (ARM_THUMB)
ldr r12,L$_rStrtInRom
orr r12,r12, #1
bx r12
#else
ldr pc,L$_rStrtInRom /*跳转到romStart()中执行*/ #endif
CPU将执行权转移给romStart()之后。该函数就使内存清空,然后把整个引导映像复制到内存中,最后将CPU的控制权交给usrInit()。
修改sysLib.c
文件sysLib.c提供VxWorks和应用程序间的板级联系,这里重点介绍一下内存映射函数。
目标系统开启了MMU模块,BSP在sysLib.c文件里面就定义了一个sysPhysMemDesc[ ]表。部分代码如下所示:
PHYS_MEM_DESC sysPhysMemDesc [] =
{ (void*) (ROM_BASE_ADRS+0xf0000000), (void *) (ROM_BASE_ADRS),
ROUND_UP(ROM_SIZE_TOTAL*2,PAGE_SIZE),
VM_STATE_MASK_VALID|VM_STATE_MASK_WRITABLE|VM_STATE_MASK_CACHEABLE,
VM_STATE_VALID|VM_STATE_WRITABLE_NOT|VM_STATE_CACHEABLE_NOT
}
上面一小段代码是对ROM_BASE_ADRS 的内存映射,ROM_BASE_ADRS+0xf0000000是要映射的虚拟地址,ROM_BASE_ADRS是硬件设计时定义的实际物理地址,ROUND_UP(ROM_SIZE_TOTAL*2,PAGE_SIZE)是映射长度,VM_STATE_MASK_VALID|VM_STATE_MASK_WRITABLE|VM_STATE_MASK_CACHEABLE是可初始化的地址状态,VM_STATE_VALID|VM_STATE_WRITABLE_NOT|VM_STATE_CACHEABLE_NOT是实际初始化的地址状态。
若添加新的外设,该外设对应的内存空间必须在sysPhysMemDesc[]中配置。通过这样的配置就完成了内存映射和MMU的开启。
修改dm9kEnd.c
由于S3C2440使用的是DM9000网卡。要做好DM9000网卡的END驱动首先要初始化网卡的数据结构dm9kDevice,这个数据结构如下:
typedef struct dm9kDevice
{
END_OBJ endObj; /*继承类 */
int unit; /*设备单元号 */
UINT32 flags; /* 本地标志信号*/
int ivec; /* 中断向量 */
int ilevel; *中断级 */
……
} DM9K_DRV_CTRL
数据结构中的END_OBJ类型成员、网卡单元号、中断号和中断向量是网卡驱动中必须包含的成员元素。
驱动的部分接口函数,主要包括网卡加载函数dm9kEndLoad、网卡启动函数dm9kStart、停止网卡函数dm9kStop、网卡控制函数dm9kIoctl、网卡卸载函数dm9kUnload、网卡发送函数dm9kSend、获取组播地址函数dm9kMCastGet、启动轮询模式函数dm9kPollStart、关闭轮询模式函数dm9kPollStop、轮询模式发送函数dm9kPollSend、轮询模式接收函数dm9kPollRcv等,通过对这些接口函数编写功能,实现网卡驱动。
在编写驱动的过程中,还必须注意:由于目标板用一种100pin的DM9000芯片,这种芯片除了有CMD信号之外,还有6根地址片选信号SA4~SA9,根据SA4~SA9对应的CPU地址线和数据手册上引脚定义,可以计算出网卡的端口地址,如果SA4~SA9对应CPU地址的addr4~addr9,那么网卡端口基址就是0x18000300,这样可以计算出网卡的基地址。
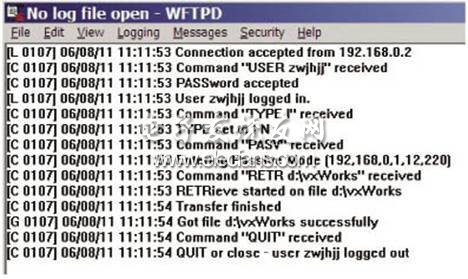
图2 VxWorks COM1口的打印信息
BSP的调试与仿真
BSP修改完成以后,就要进行调试了,这里采用点亮LED灯的调试方法,写一段点灯程序,用BSP生成bootrom和VxWorks映像,使用H-JTAG软件将bootrom烧写进目标板的norflash中,通过在不同位置反复的调用点灯程序和烧写bootrom到norflash中来调试BSP,并通过串口查看调试信息,如图2所示,是操作系统启动过程中,经过串口传输到主机上打印的调试消息,通过这些信息可以判断出系统启动过程中哪一部分出现了问题。
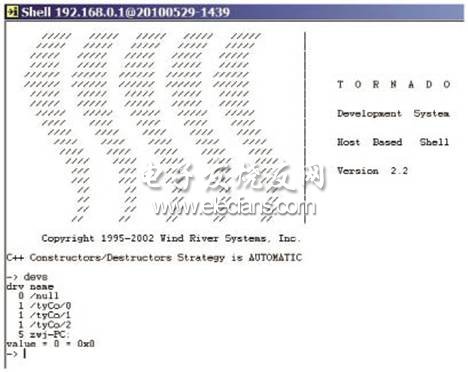
图3 VxWorks Shell界面
系统上电之后,bootrom首先运行,然后通过网线将VxWorks映像文件下载进rom中,图3所示为VxWorks的Shell界面,显示设备列表有串口和网口,表明串口和网口驱动成功。









 工商网监
工商网监
评论