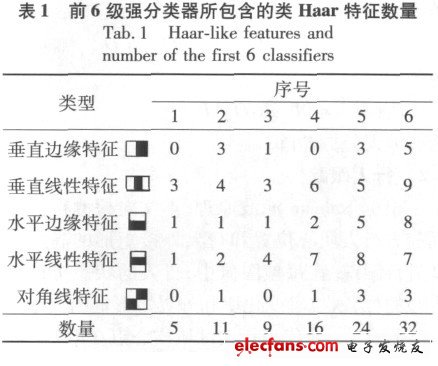
。第六章主要对整个系统链路指标进行了分析,其中包括接受灵敏度和发射功率等,进一步说明了 77GHz 车载雷达系统的可行性,并对射频前端电路进行了加工和测试,为后续工作积累经验。ADAS视觉方案及11家创业
2020-06-04 15:15:44
我司提供行人检测/人体检测/人体抓拍海思解决方案,同时还有ARM行人检测摄像机方案。人体检测自动识别摄像机基于视频图像智能分析技术原理研制,采用公司自主研发的人体轮廓识别技术,综合识别人体头部、肩部
2018-06-14 11:29:46
由于最近的项目遇到LabVIEW视觉检测的。在网上找了很久的资料,很少。有哪位大神可以帮我看看我这LED最后处理和识别好坏。
2017-05-17 20:08:54
LabVIEW视觉检测怎么对点阵的LCD屏进行检测如1602显示屏。只检测显示的图案缺陷,我使用匹配模式怎么差别那么大,好明显的都检测不出来。对于这种点整的LCD屏一般都使用什么方法来检测
2017-08-22 09:13:49
MATLAB的行人目标检测的方法有哪些,就是主要的方法,基于背景的,基于目标的,还有其他的。都有哪些?
2023-08-23 16:30:20
网上的教程都是在人脸上加个框框,进行人脸识别,而不是进行人脸检测。请问有谁尝试过和face++进行交互,能够识别摄像头前的人是预存的人,嗯,类似于人脸开密码箱那种的。但是又想加上一部检测到运行拍照发邮件那个
2020-06-10 09:28:11
项目名称:车载adas应用申请使用试用计划:1.目前在做的项目为车载ADAS,计划使用Hi35xx系列芯片,项目内容包括车辆/行人目标检测,车道线偏离预警,碰撞预警。2.项目内容不要求实时,用3516或3519能达到5-10帧每秒的处理速度即可
2020-11-19 20:45:45
:2022.1 bash
提示如下内容说明进入镜像成功。运行行人跟踪检测app需要注意的是当前的模型是有一定的适用条件的,一般支持RTSP视频流,同时也支持通过文件读取的视频资源进行检测,但是
2023-08-02 10:48:27
芯片上方案比较少。我们尝试在定点DSP上处理人脸检测效率低,没有达到我们预期的目的。而TMS620C6748芯片是我们另外一个选择。该方案需要通过视频采集图像,利用图像检测算法获取运动目标,然后对运动目标区域进行人脸检测算法识别,并对目标进行跟踪。
2015-09-10 11:09:12
。此外,还应仔细检测加工基准面位置的准确度、机械加工余量分布以及壁厚偏差等。视觉尺寸检测,视觉外观表面体积测量系统-机器视觉_视觉检测设备_3D视觉_缺陷检测二、尺寸检测的方法产品的实际尺寸往往不可或缺
2021-07-08 10:02:19
跟踪方法原理是, 固定视觉传感器在焊枪正前方, 通过直接观察焊枪与焊缝中心线的位置关系, 提取偏差信息, 输出纠偏控制电压. 由于铝合金具有较强的反光性, 在熔池前端区域有一个反光区, 检测的间隙
2018-11-02 10:48:48
【作者】:谢尧芳;苏松志;李绍滋;【来源】:《厦门大学学报(自然科学版)》2010年02期【摘要】:行人检测是计算机视觉领域中的研究热点,其实质是一个二分类问题.目前基于统计的行人检测技术已取得了
2010-04-24 09:48:05
如题,公司使用的开发板是imx6q-c_v1.3,内核是linux-3.0.35,公司领导要求在板子上实现摄像头在线的行人跟踪检测功能,我已经移植了opencv到开发板上运行,发现opencv自带
2022-01-10 07:18:03
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
机器视觉 --检测图像边缘小程序
2015-08-23 21:35:10
高产量下的薄膜质量,提出了基于机器视觉检测技术在线薄膜缺陷自动化检测方法。机器视觉检测技术的薄膜表面缺陷检测,通过建立CCD接收到的放置薄膜前后的图像,利用同样的图像采集硬件和不同的软件分析方法。为
2020-10-30 16:15:47
角点是图像很重要的特征,对图像图形的理解和分析有很重要的作用。角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维
2016-01-22 13:46:00
、计算、最终进行实际检测、控制和应用。产品的表面缺陷检测是机器视觉检测的一个重要部分,其检测的准确程度直接会影响产品最终的质量优劣。由于使用人工检测的方法早已不能满足生产和现代工艺生产制造的需求,而利用
2016-01-20 10:29:58
为研究夜间追尾事故中本车智能防撞预警方法,本文提出了一种基于毫米波雷达和机器视觉的前方车辆检测方法。利用多传感器融合数据,检测前方车辆的距离、速度等。建立传感器之间转换关系,转换雷达目标的世界坐标到图像坐标。
2021-06-10 10:23:08
学生接触Labview有一定时间了,也算积累了一些小经验,现在想要用来做类似物体表面缺陷检测这样的机器视觉项目,对于Labview中的视觉模块以及视觉助手也比较熟悉,但是到具体应用还存在一定距离
2015-05-29 12:33:05
=339699&page=1#pid2608768现在移植到dsp上进行人检测实验。重新训练基于彩色图像的行人检测分类器。速度还有待优化截图如下:后期继续做速度优化。`
2014-06-27 22:44:05
在检测道路行驶过程中的车辆或行人的存在或者行为状态所用到的感应器件
2019-06-08 10:33:41
重要意义。但是在行人检测中却由于行人兼具刚性和柔性物体的特性,外观易受穿着、尺度、遮挡、姿态和视角等影响,使得行人检测成为计算机视觉领域中一个极具挑战性的课题。在日前的行人检测方法中,驾驶系统中的超声波
2018-12-12 15:24:03
Mean Shift 是一种密度梯度的无参数估计方法,应用于目标跟踪领域有较好的性能。然而Mean Shift 算法是一种半自动跟踪方法。为此,提出边缘检测与Mean Shift 相结合的方法。利用结
2009-05-27 15:23:14 24
24 目前有很多大产品的配件比如橡胶圈,在装配过程中容易脱落、漏检导致产品不良,对公司超成一定损失。技术在不断发展的,随着机器视觉技术的越来越成熟,现在可以用2D/CCD视觉检测系统对胶圈数量、2D胶圈
2023-06-05 11:39:35
指向和单脉冲跟踪在车载动中通中的应用
概述:现阶段车载“动中通”跟踪方式主要有惯导向方式和单脉冲跟踪方式,2种跟踪方式有各自的优缺点。介绍了一
2010-04-28 16:24:0232 EVP-6100演示视频 行人检测系统
视频教程
2010-11-18 16:21:4843 智能监控是当前计算机视觉领域中的热点问题之一。本文提出了一种运动检测与视觉跟踪相结合的智能监控系统,能自动完成轨迹的初始化和终止,能够对数目可变的目标进行自动跟踪
2011-09-14 15:16:12138 本文设计了一种精度高,稳定性好的基于单目视觉的车载追尾预警系统。它利用一种新的边缘检测算法识别前方道路,然后利用阴影检测与跟踪相结合的方法识别前方车辆,接下来根据
2012-10-24 16:00:00 2791
2791 
利用粒子滤波实现行人跟踪是视频智能监控的主要方法之一,但粒子滤波的粒子退化问题尚未得到一个比较理想的解决方法。本文利用重采样后的粒子集,构造经验分布函数,用支持向
2013-08-20 16:57:020 嵌入式视觉运动目标跟踪技术研究......
2016-01-06 13:43:1718 基于机器视觉的LED芯片检测方法
2017-02-07 18:25:2122 移动机器人视觉导航中基于Hough变换的直线检测与跟踪_周燕红
2017-03-19 11:45:571 基于Codebook背景建模的视频行人检测_黄成都
2017-03-19 11:41:390 GPS接收机设计了一个只有2 cm定位误差的导航系统,但他们并没有考虑在一些不能使用GPS的区域,如隧道。张传斌等人则把UKF滤波方法应用到车载导航中,但UKF滤波方法计算量大,难以满足高速公路上实时性要求很高的车载定位跟踪系统。针对以上
2017-09-05 17:17:033 功能,360%范围内实时检测运动目标和重新定位新的目标;用PTZ 摄像机系统模拟中央凹视觉功能,完成局部精确注视与平滑跟踪。给出了系统控制策略、运动检测算法及实验结果。为解决视觉跟踪中高分辨率、大视场和实时性三者之间的
2017-10-18 15:58:196 行人检测如今已经应用到生活的多个领域,如智能监控、无人驾驶和智能相机等。自hog提出行人检测这一思想,到如今已经有约有数千种方法。现有的行人检测方法大致可以分成三大类:DPM变体、深度网络和决策森林
2017-11-05 10:43:385 窗口法对整幅红外图像进行遍历,用训练好的SVM进行分类检测。在LSI Far Infrared Pedestrian Dataset数据库上实验证明,基于多特征的检测方法相较于单一特征的方法提高了红外行人检测的精度,降低了误检率和漏检率。
2017-11-08 15:05:3614 针对如何快速而精准地检测出运动目标问题,借鉴昆虫复眼在视觉信息处理上的独特技巧和原理,提出一种基于仿生视觉系统的运动目标快速检测方法,为确保检测效果,利用序列图像中目标和背景信息在空间和时间域上
2017-11-10 11:35:246 在行人检测中,由于外界环境复杂变化和行人自身的不同特点,往往会造成错误检测以及遗漏检测。针对以上问题,文中提出一种基于图块和二阶统计特征的方法,提高检测的准确率。首先利用基于图块的帧差法进行前景检测
2017-11-14 10:44:5513 对图像和视频中的不同类别的对象的检测是计算机视觉研究的基本任务。行人检测是一个热门的研究课题。行人是交通系统中的主要参与者,所以对视频监控系统中的行人检测对智能交通系统的研究和应用有着重要的意义
2017-11-15 10:51:5611 检测算法相融合,提高行人外观特征提取的准确性;然后,提出自适应显著特征选择方法,有效地提取行人特征描述;最后,通过动态加权平均排名模型将多特征融合。实验表明,所提出的方法提高了行人识别的准确性,同时对姿态的变化具有较
2017-11-21 16:18:082 针对复杂环境中的行人检测问题,提出了一种有效的基于分层稀疏编码的图像表示方法。首先通过两层稀疏编码模型结合基于KSVD的深度学习算法来获得图像的稀疏表示,对图像块及同一区域的高阶依赖关系进行了建模
2017-11-24 10:24:060 针对在复杂场景下,聚合通道特征(ACF)的行人检测算法存在检测精度较低、误检率较高的问题,提出一种结合纹理和轮廓特征的多通道行人检测算法。算法由训练分类器和检测两部分组成。在训练阶段,首先提取ACF
2017-11-27 10:25:160 疲劳驾驶研究中,面部关键特征精确定位与跟踪是个难点。提出了一种基于主动形状模型ASM和肤色模型的疲劳驾驶检测方法。首先,利用肤色模型检测到人脸区域为ASM提供初始定位;然后基于ASM进行人眼和嘴巴
2017-11-28 11:31:222 出入口图像建立背景模型,提取前景图像对其进行人头检测和跟踪;之后,剔除行人目标得到物件目标,对物件目标进行跟踪;最后,根据行人和物件的运动特征进行监控。对12段出入口视频序列的实验结果表明,监控方法能够准确稳定地跟踪行人和物件,完
2017-11-28 15:03:341 针对现阶段大部分卫星导航接收机跟踪阶段的欺骗检测方法只能检测单欺骗源发射的欺骗信号的问题,提出一种基于载波跟踪环路统计特性分析的欺骗检测方法。首先分析了跟踪阶段已有欺骗检测方法的不足;其次,建立
2017-11-28 16:39:420 针对可变形部件模型(DPM)算法在行人检测领域中的检测精度高,但由于在特征提取和行人定位两步中的计算量过大,导致检测速度过慢而不能应用于实时行人检测的问题,提出了一种融合分支定界算法和级联检测
2017-11-30 15:52:080 为了在行人检测任务中使卷积神经网络(CNN)选择出更优模型并获得定位更准确的检测框,提出一种改进的基于卷积神经网络的行人检测方法。改进主要涉及两个方面:如何决定CNN样本迭代学习次数和如何进行重合
2017-12-01 15:23:500 针对汽车内饰皮革的瑕疵检测易受皮革自身纹理干扰、检测难度较大的问题,发现瑕疵存在于均匀变化图像中局部变化明显的区域,符合人眼注意机制,故提出了基于视觉显著模型的皮革瑕疵检测方法。首先提取皮革图像
2017-12-04 15:46:070 为了提高机动车驾驶时的安全性,提出了基于计算机视觉的行车安全中车距估计与超车检测方法。首先,使用车辆阴影检测方法确定车辆位置,根据阴影位置和视觉中心点的距离建立车距估计函数;其次,对超车情况使用背景
2017-12-07 16:39:080 针对在基于视频的空中签名认证系统中,现有方法无法满足指尖跟踪的准确性、实时性和鲁棒性要求的问题,在对比研究目前常用的多种跟踪方法的基础上,提出一种基于时间上下文的跟踪一学习检测(TLD)方法。在原始
2017-12-19 18:59:060 针对经典跟踪一学习一检测(TLD)目标跟踪算法由于检测区域过大而导致的检测时间过长及对相似目标跟踪处理效果不理想的问题,提出一种检测区域可动态自适应调整的方法-TLD-DO。该方法利用两次
2018-01-03 16:33:180 为了解决变结构目标跟踪过程中目标失跟率较高的问题,提出了一种基于视觉量子(vision quantum,简称VQ)的目标跟踪方法.该方法首先在图像内自上而下地辐射视觉量子采集灰度信息,统计量子内部
2018-01-08 14:59:400 摄像机运动情况下的运动目标检测及跟踪是视频监控中的热点问题。论文提出一种基于SIFT( Sc ale Invariant Feature Transform)特征匹配的运动目标检测和跟踪算法。在目标
2018-01-09 16:17:461 人员进行处理,还需要实时统计客流量,方便管理人员及时发挥调度作用,合理配置资源。因此,基于车载视频监控的乘客检测及跟踪方法成为计算机视觉和模式识别领域的研究热点。本文要解决的主要问题有:复杂环境的影响,比如
2018-01-23 15:41:091 为使舞蹈机器人根据行人的运动轨迹进行路径的动态规划,增强与人共处的能力,提出一种基于激光雷达的室内行人跟踪方法。获取激光原始数据并进行预处理,根据激光数据的分布特点对DBSCAN算法进行优化,实现
2018-02-05 15:33:330 为提高长时目标跟踪的鲁棒性和准确性,提出一种改进的跟踪学习检测( TLD)方法。利用少量具有尺度不变特性的BRISK特征点和均匀分布点组成跟踪点集合代替TLD中的均匀分布跟踪点。这样不仅可以减少跟踪
2018-02-27 13:38:312 针对非重叠视角下的行人重识别和高维特征提取等问题,提出基于块稀疏表示的行人重识别方法。采取典型相关分析( CCA)方法进行特征投影变换,通过提高特征匹配能力来避免高维特征运算引起的维数灾难问题,并在
2018-03-29 14:57:480 目前OpenCV中的行人检测算法支持HOG+SVM以及HOG+Cascade两种,二者都采用了滑动窗口技术,用固定大小的窗口扫描整个图像,然后对每一个窗口进行前景和背景的二分类。为了检测不同大小的行人,还需要对图像进行缩放。
2018-08-03 11:27:425616 行人是城市交通系统的主要参与者,保障行人安全和减少其对机动车的干扰是城市交通系统建设的重要目标,因此对行人交通的研究也越来越受到重视。行人交通研究的主要问题包括行人检测、目标跟踪和行为分析。基于视频
2019-07-29 08:06:002993 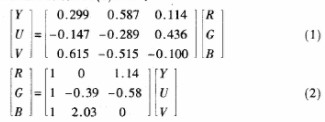
近年来,随着深度学习在计算机视觉领域的广泛应用,基于深度学习的视频运动目标检测受到广大学者的青睐。这种方法的基本原理是利用大量目标样本数据训练一个基于深度神经网络的分类器,然后通过分类器在线检测目标
2018-11-19 16:01:4422 Metoak Technology展示了用于ADAS和自动驾驶车辆的车载视觉传感模块,具有实时检测车辆可行驶区域的功能。
2018-11-26 06:04:004757 行人检测是当前机器视觉领域的挑战性课题之一。为了提高行人检测效率,提出一种基于优化图的半监督学习的行人检测算法。首先,提取每幅图像的形状上下文特征,并采用选择性搜索提取出行人候选区域建议框;然后
2018-12-21 17:23:065 自主驾驶矿 井机车需要实时检测和定位行驶前方的巷道行人,激光雷达等非视觉类方法成本高昂,而传统基于特征提取视觉类方法无法解决并下光照差且光线不均匀的问题。提出一种基于深度学习的井下巷道行人视觉定位
2019-03-28 16:49:5212 针对复杂环境下行人检测不能同时满足高召回率与高效率检测的问题,提出一种基于卷积神经网络(CNN)的行人检测方法。首先,采用CNN中的单步检测升级版网络YOL0v2 初步检测行人;然后,设计一个网络
2019-04-12 17:30:566 最近在做基于激光信息的机器人行人跟踪发现如果单独利用激光信息很难完成机器人对行人的识别、跟踪等功能。
2019-07-08 17:04:333449 根据世界卫生组织的最新调查,每年有大约125万人死于道路交通事故,其中超过一半的人数是弱势道路使用者(行人、骑车者、摩托车手)。
2019-07-19 13:44:015892 谷歌在去年便开始研发基于视频的行人监测系统,其采用的便是深度学习算法,能在 0.25 秒内准确识别路上的行人。在谷歌负责计算机视觉和机器学习的研究科学家 Anelia Angelova 表示,「视觉信息相比雷达数据,可以给车描摹一个更广阔的视域,但是整个处理过程要慢一些。
2019-08-08 08:35:072483 行人在车辆静止时背对着车辆向前方行走,行走到一定位置之后等候车辆起动,待车辆向前行驶一段距离后,行人继续向前运动,并伴有横穿道路等动作。从图5 的跟踪曲线可以看出,识别行人的外接矩形宽度变化比较显着,这符合实际情况,由于行人行走时腿部跨度造成封闭矩形宽度变化明显。
2019-08-09 17:29:404880 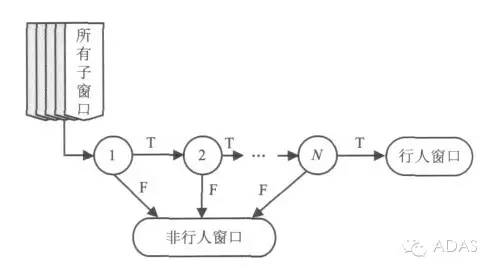
shadowCam系统可利用视觉感知技术来检测车辆前方地面阴影的变化,并对其进行分类,以判断前方是否有隐藏的移动车辆或行人。
2019-11-02 11:45:39980 针对复杂环境下行人检测不能同时满足高召回率与高效率检测的问题,提出一种基于卷积神经网络(CNN)的行人检测方法。首先,采用CNN中的单步检测升级版网络YOLOv2初步检测行人;然后,设计一个网络
2019-11-05 16:15:157 行人车辆检测在自动驾驶、增强现实、智慧安防、智能交通等诸多领域都有着广泛的应用,近年来受到学术界和工业界越来越多的关注。针对这一问题研究者们提出了很多有效的方法,但由于实际场景中经常出现光照变化
2019-11-22 17:17:3010 Fynd的研究团队一直在训练一个行人检测模型来支持我们的目标跟踪模型。在本文中,我们将介绍如何选择一个模型架构,创建一个数据集,并为我们的特定用例进行行人检测模型的训练。 什么是目标检测 目标检测是一种计算机视觉技
2021-01-07 14:04:534144 缺陷自动化检测方法。机器视觉检测技术的薄膜表面缺陷检测,通过建立ccd接收到的放置薄膜前后的图像,利用同样的图像采集硬件和不同的软件分析方法。为工业半透明薄膜生产提供经济、简易、适用的质量评估方法。 机器视觉薄膜表面缺陷检测
2021-02-05 14:47:031741 行人是城市交通系统的主要参与者,保障行人安全和减少其对机动车的干扰是城市交通系统建设的重要目标,因此对行人交通的研究也越来越受到重视。行人交通研究的主要问题包括行人检测、目标跟踪和行为分析。基于视频
2021-03-29 11:47:123717 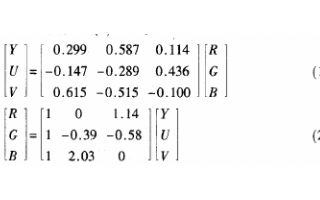
行人检测是目标检测领域中重要的研究课题,其在智能驾驶系统、视频监控、人流量密度监测等领域有广泛应用。但由于行人背景的复杂以及个体本身的差异,行人检测成为目标检测领域的研究难点之一。
2021-05-02 09:55:004644 
由于可见光图像和红外图像的成像原理不同,可见光图像的行人检测算法难以直接应用于红外图像中为此,提出一种基于多级梯度特征的红外图像行人检测算法。使用改进的图像显著性检测算法提取红外图像的关键区域
2021-05-27 16:27:036 利用单尺度特征映射进行多尺度行人检测存在准确率和效率较低的问题。为此,提出一种基于多分辨率滤波通道的多尺度检测方法。应用尺度感知池增强感受域对应性,通过软决策树实现尺度不变性,在使用滑动窗分类策略
2021-05-27 16:30:417 针对传统卷积神经网络在行人检测中卷积速度慢、抗噪弱、冗余大的问题,提岀了一种基于深度稀疏自编码网络的方法。首先在输入层后添加一层感兴趣层,在非相邻和相邻特征(nor- neighboring
2021-06-11 14:53:3512 面向特种头型微钻的视觉检测方法
2021-07-01 15:43:482 无锡市东富达机器视觉技术的缺陷检测方法,即利用图像处理和分析对产品可能存在的缺陷进行检测。 在检测产品存在缺陷时,其图像表现为缺陷处的灰度值与标准图像在此处的灰度值有差异。首先对瑕疵缺陷图像的特征
2021-12-17 14:20:513911 传统的检测方法仍然依靠大量人工凭借肉眼检测,不仅影响工作效率, 而且由于工人视觉疲劳、个人评判标准等因素存在, 直接影响零件的使用寿命和性能。
2022-08-10 14:55:123136 9月7日,上汽AI LAB视觉团队自动驾驶检测跟踪算法在国际榜单nuScenes上斩获全球第一,将跟踪算法关键指标AMOTA(Average Multiple Object Tracking Accuracy)在现有最高记录上提升3个百分点。
2022-09-09 16:25:471214 焊缝跟踪器的原理 创想智控自主研发的视觉焊缝跟踪器,由镜头、光学传感器、中央处理器构成,可无需外接工控机,直接与机械臂控制器、PLC和其他多轴控制器相连,直接输出运算结果,实现实时跟踪、在线检测、自动纠偏和异常
2022-09-19 17:06:472426 在工业生产中总是经常遇到裂痕、划痕等产品的表面缺陷问题,机器视觉行业对于表面检测相比前几年已经有很大的突破,对于产品表面的划伤、污迹等检测已经不再是难点。
2022-10-09 16:40:051935 目标跟踪是计算机视觉中非常重要的任务之一。它刚好在目标检测之后出现。为了完成目标跟踪任务,首先需要将目标定位在一帧中。
2022-10-12 09:40:062443 机器视觉的检测方法可以很大程度上克服人工检测方法的抽检率低、准确性不高、实时性差、效率低、劳动强度大等弊端,在现代工业中得到越来越广泛的研究和应用。
2022-12-07 11:16:472477 在先进驾驶辅助系统中, 基于视觉的行人检测只能对摄像头视野范围内的无遮挡行人进行检测, 并且易受天气的影响, 在极端天气下无法工作。
2023-02-22 10:17:463984 多目标跟踪(MOT)任务的关键挑战是跟踪目标下的时间建模。现存的用检测跟踪的方法采用简单的heuristics,如空间或外观相似性。
2023-04-18 09:12:551727 机器视觉检测是指在图像或视频中识别和定位具有特定特征的目标的过程,通常涉及目标识别、目标跟踪、目标分割等任务。它是机器视觉领域中最核心和最基础的技术之一,具有广泛的应用前景。
2023-05-08 09:34:52859 数据的获取尤为重要,是 科学的行人服务设施规划设计和优化配置的基础。文章采用基于SSD模型行人检测与现常用的基于HOG与SVM特征识别 算法比较对行人检测,并利用Kalman滤波算法对行人跟踪,使用OpenCV3.4.7计算机视觉库和MFC对行人监
2023-07-20 14:45:010 在当今制造业中,焊接技术一直扮演着至关重要的角色。为了提高焊接质量和效率,视觉焊缝跟踪系统应运而生。这些系统利用计算机视觉技术,实时监测焊接过程中的焊缝位置,从而实现自动化控制和跟踪。然而,随着技术
2024-03-05 16:30:56934 
在焊接自动化的推动下,焊缝检测技术逐渐成为焊接质量控制的重要环节。传统的焊缝检测方法在一定程度上满足了生产需求,但随着工业应用对精度和效率要求的提升,激光焊缝跟踪器逐渐成为一种更具竞争力的解决方案。今天一起了解激光焊缝跟踪器与传统焊缝检测方法的对比。
2024-11-28 16:47:001006 
随着车联网技术的飞速发展,车载终端作为连接车辆与智能交通系统的关键设备,其安全性日益受到关注。为了确保车载终端在各种环境下都能稳定运行,且不会对车辆和乘客造成安全隐患,对其进行全面的安全检测显得尤为重要。本文将深入探讨车载终端安全检测的内容与方法。
2025-01-30 15:12:001807
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论