在目标硬件上搭建一个系统,在实时控制仿真环境中,来验证无人飞机(UAV)的制导、导航和控制(GNC)算法。
2013-01-29 10:35:34 1915
1915 
在开发的早期阶段,开发一个硬件在环(HIL)测试环境来测试无人机GNC解决方案,HIL测试环境是软件仿真和飞机实验的一个中间步骤,对于无人机GNC软件的开发过程非常关键。
2015-05-18 10:01:275484 在半实物仿真试验中,飞行控制计算机的控制信号通过D/A转换后,经过伺服控制驱动器放大来驱动无人机的执行机构即电动伺服舵机,然后仿真计算机通过A/D通道采集电动伺服舵机的位移信号,并且输出控制指令(三轴姿态角)控制三轴飞行仿真转台,模拟出无人机的姿态角及姿态角速率等信号。
2020-07-12 10:49:271980 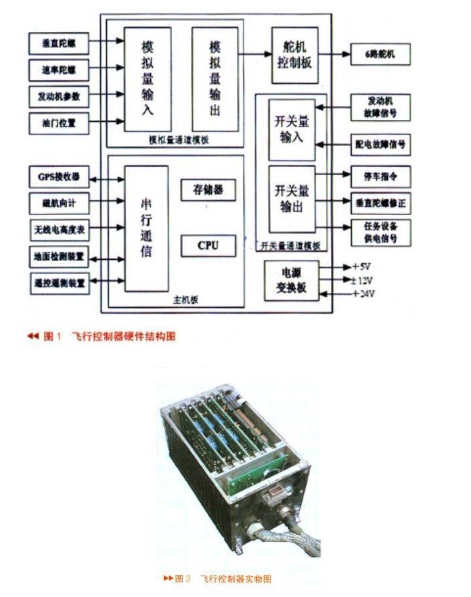
提出了一种使用低成本无人机实时生成探索地图的解决方案。这依赖于Tello Edu无人机提供的信息,该无人机将图像流式传输到外部笔记本电脑上以进行实时处理。该解决方案运行单目视觉 SLAM来注册图像并创建未缩放的环境地图。
2022-08-29 16:02:571332 基于LabVIEW的实时控制与仿真技术应用研究
2013-04-21 19:08:31
同时控制工厂内的大量节点或功能,所以它们运营的实时性至关重要。对于一个解决方案而言,实现精准的定时需要两个部分:一个是实时操作系统,另一个则是针对工业通信的灵活时间感知外设。实时操作系统(RTOS
2018-08-29 15:19:26
程序以及他们之间通讯的机制,还有在计算机中如何安装无人机的仿真环境。本文是在amov-lab的prometh
2021-09-15 08:44:10
wifi模块SKW77组成的无人机飞控系统框架图,系统包括4块: (1)远程服务器端(2)飞机端(3)地面中继端(4)手机视频控制端飞控系统工作机制:(1)飞机端WIFI模块SKW77与地面中继端的wifi
2017-10-27 14:38:51
无人机主从式姿态同步控制器设计与仿真[size=13.3333px]一、设计内容[size=13.3333px] 无人机姿态同步是无人机编队飞行的基础。本设计采用状态反馈实现具有领导者的无人机姿态
2017-04-27 14:10:52
在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。
2019-10-22 07:58:23
传感器和压力传感器等进行避障、自动运行和紧急制动等操作,实现自动驾驶功能。系统由主板卡进行信息汇总,并最终完成自动控制。本导航系统的根据无人驾驶汽车环境感知系统收集到的环境信息,规一条从起始点到目标点
2014-11-11 11:21:30
`1、前言无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合
2018-10-25 13:49:30
、无人机任务设备管理和应急控制三大类。2、方案概述Ameya360 无人机视觉、高级传感与处理解决方案主要有陀螺仪(飞行姿态感知),加速计,地磁感应,气压传感器(悬停高度粗略控制),超声波传感器(低空高度
2018-04-23 17:22:42
人力来解决,这样就消耗的大量的人力和物力,而且效率很低。基于以上的需求,我们急需开发一套无人船设备,能够有效的帮助解决这些问题。 为了解决以上的问题,我们需要无人船具有自主导航和手动控制两种控制方式
2016-11-07 21:38:34
日前,德州仪器(TI)宣布与Omnitrol Networks公司结成合作伙伴联盟,共同针对印制电路板(PCB)制造应用推出射频识别(RFID)实时跟踪解决方案。这款最新产品集成
2018-08-31 11:40:17
:学习ARM-linux嵌入式开发平台;学习蓝牙控制器的连接、数据传输;设计无人船的定位、导航规划、遥控、避障;预计成果:分享项目的开展,实施,结果过程,展示项目结果,分享项目源码
2020-04-07 16:08:35
申请理由:目前无人机的避障系统无法满足自主飞行的要求,所以需要使用雷达来到作为无人机的导航部件进行飞行中的避障和实时测绘等功能项目描述:1. 无人机自主飞行时候避障部件2. 无人机飞行测绘部件,通过雷达对周围环境进行一个简单的测绘
2016-01-11 14:54:52
项目名称:无人机控制试用计划:1,需要一块板子学习单片机及嵌入式电子硬件知识。2.板子带有陀螺仪且小巧,可以实现飞机控制,有多路pwm ,等硬件接口。3,项目可以实现飞机的起飞,降落,定高等,飞控功能。
2019-03-22 18:23:20
的自主性和高级有效载荷;电子解决方案必须满足更高的标准要求并降低诉讼风险。ADI中国技术支持中心将探讨发展、市场现状和解决方案面临的四个方面的挑战:障碍物检测/映射、空对地/空对空通信、导航和稳定性
2017-12-12 14:16:52
解,对相互独立的中间变量进行并行计算,使得单个运算周期能够同时进行6次浮点运算,在不盲目增加硬件消耗的条件下有效提高了解算速度。仿真和实验结果表明系统能够高效地进行导航信息解算,在小型无人机的导航控制领域有
2019-07-03 06:57:34
基于EtherCAT的Matlab实时仿真器配置详解为什么写这篇文章什么是实时仿真Matlab实时仿真器重点&&我的硬件配置方案EtherCAT从站配置EtherCAT配置为什么写
2021-08-17 06:33:24
的实时工业控制网络更好地实现多个电机同步。ADI解决方案的价值主张针对电机控制系统,工业系统设计要求是低功耗、高效率,ADI公司提供单个的器件以及完整的产品信号链可以加快系统设计;在信号链中,ADI公司
2018-10-25 10:19:00
获得最优的线性度和效率。本文将讨论使用分立元件的功放监测与控制解决方案,并介绍集成的解决方案。ADI公司提供了适用于该应用的一系列元件,包括多通道数模转换器(DAC)、模数转换器(ADC)、温度传感器
2019-06-17 08:13:22
关于无人驾驶硬件平台的解决方案,不看肯定后悔
2021-11-03 06:32:54
分享一个不错的国民MCU电机控制解决方案
2022-02-11 08:03:27
Chirp SonicTrack超声波控制器跟踪解决方案有哪些主要特点和优点?Chirp SonicTrack超声波控制器跟踪解决方案有哪些应用?
2021-07-30 06:04:19
国家文物保存环境无线实时采集监测系统解决方案
2021-05-26 07:05:03
`墨尔本大学和当地大都会一名消防队员合作制造了一架无人机,可以使用商业现货(COTS)和开源组件自动绘制室内环境。这架无人机被称为 U.R.S.A(无人侦察安全飞机),由来自'
2018-08-16 09:42:10
单通道双向控制IC解决方案
2021-01-27 07:56:08
跪求四旋翼飞机PID控制以及姿态控制算法等MATLAB仿真资料,谢谢
2015-07-17 11:33:09
制导系统测试 20无人作战系统 21结构测试 22发动机测试 24风洞实验测试 26声学与声纳应用 28大容量数据存储与回放 31控制系统设计与仿真 32软硬件系统可靠性测试 34NI技术支持与服务助力
2019-04-02 09:40:01
系统维护和使用。随着机电一体化技术的发展,现场总线技术不断应用到各个领域并得到了广泛的应用。本文针对机组式印刷机械的同步需求,提出了一种基于CAN现场总线的同步控制解决方案,并得以验证。
2021-01-29 06:37:54
成本,而且还给系统软件设计增加不必要的负担。为此,提出了一种基于CPLD的雷达仿真信号的实现方案,它能为机载雷达测试系统提供所需的多种典型的重频脉冲及制导信号。
2020-12-08 06:09:34
第 25 卷 第 9 期电子设计工程 2017 年 5 月Vol.25 No.9Electronic Design EngineeringMay. 2017基于STM32 智能小车视觉控制导航的设计李晓...
2021-08-17 06:40:21
1 引言 利用可见光成像与红外成像传感器实现实时目标成像跟踪是精确制导武器及机载成像光电系统研究的核心技术。伴随着实战环境日益复杂以及伪装、隐身等目标特性控制技术的飞速发展,机载实时图像跟踪
2019-07-02 06:57:27
提升可靠性,并获得更大的载重量和更好的电池续航能力。 二、方案框图: 以下是一款典型的以拍摄为主的无人机的系统框图,其主要由摄像头、MCU控制器、GPS电路、传感器电路、无线遥控、无线视频
2020-07-02 15:40:30
成像制导仿真系统是由哪些部分组成的?一种基于DSP处理器的成像制导图像生成仿真系统设计
2021-06-04 06:30:24
解决方案。 PN7120是一款完整的NFC控制器解决方案,集成固件和NCI接口,专为13.56 MHz的非接触式通信而设计
2020-05-25 09:11:08
国内有MVB 和 WTB 控制芯片和解决方案吗?
2022-09-01 16:04:28
实时高性能需求尤其突出。面对以上挑战,合作伙伴翌控科技基于米尔STM32MP135开发板发布开放式高实时高性能PLC控制器解决方案,将高精准数据采集、预处理、存储、通信与高实时控制融为一体,为控制
2024-03-07 20:06:14
摩托罗拉CPU32微控制器的仿真和分析解决方案
2019-04-09 08:14:27
摩托罗拉CPU32微控制器的仿真和分析解决方案
2019-04-17 08:59:02
操作系统为基础的仿真平台上,提出了综合管理系统总线控制仿真软件的设计方案。该方案能够实现各机电子系统间的通讯和数据控制,并能够满足系统的实时性、容错性、灵活性和扩展性等要求。 [/hide]
2009-10-23 17:54:01
的基于模型的系统工程(MBSE)技术则给大家提供了一种全新的技术方向,分享一种全数字实时仿真的安全关键领域解决方案,提供一种新的解决思路。一种全数字实时仿真的安全关键领域解决方案国产自主可控的航空航天
2021-12-17 07:42:30
最近在整激光导航的小车,想了解一下激光制导所用到的控制硬件有哪些以及编程语言是哪种?还恳请路过的各位大佬指点迷津,万分感谢!
2019-03-05 16:06:55
纸飞机的日子一去不复返....不过一个怀旧的牛人将纸飞机玩出了新花样,玩成了黑科技。它的的确确是一架纸做的飞机,但是加上了碳纤维支架、摄像头以及推进器后,世界第一款可以实时摄像的纸质无人
2016-06-30 10:37:50
瑞萨车载导航系统解决方案 下载:
2015-01-09 17:03:43
作者:德州仪器马达控制解决方案全球业务经理Chris ClearmanC2000™微控制器(MCU)已用于控制各类应用中的电机超过25年。这些电机主要是三相同步或异步电机,通过磁场定向控制(FOC
2019-07-12 07:53:41
一、方案概述: 一个典型的无人机系统包括飞行器、一个地面控制站(Ground Control Station)GCS、有效载荷及数据链路。地面控制站用于实现任务规划、链路控制、飞行控制、载荷
2020-07-03 14:56:46
车载导航mcu的作用是控制汽车中的导航系统。作为汽车导航控制系统的核心,导航mcu必须有着耐高温和坚固的特性,使之在复杂的汽车内部环境中不容易损坏。 汽车mcu有什么作用mcu是Motor
2023-03-27 14:25:34
,我们的无人船实现的一些基本的功能,后期会对船继续升级,目前船的基本信息如下: 下面嘚瑟一下我的无人船:一、无人船功能说明该无人船具有自主导航、手动控制和回航三种控制方式。手动控制模式下,可以设置无人
2016-08-27 12:45:36
`无限遥控飞机是怎样控制飞行平衡的`
2017-02-16 11:29:04
针对电机控制解决方案,ADI提供了门类齐全的产品组合,其中包括了模数/数模转换器、放大器、嵌入式处理器、 iCoupler®数字隔离器、电源管理器件和实时以太网解决方案;这些高性能的器件和增加
2018-10-26 11:37:18
飞思卡尔半导体三款新MCU服务电表和流量计量飞思卡尔半导体日前推出针对电表和流量计量的三个高级微控制器 (MCU) 解决方案,同时还推出了综合智能表参考设计解决方案。飞思卡尔微控制器让智能表的设计具有篡改检测机制和实时使用情况监控功能,为客户提供安全性更高的智能表产品。
2019-07-18 07:03:35
针对协同虚拟环境(CVE)并发控制在一致性、响应性和并发性之间存在的矛盾,提出一种基于客户端的并发控制机制。该机制通过在客户端保存共享物体的状态信息,使系统的一致性得
2009-03-21 15:33:31 8
8 针对电动遥控飞机原有模拟控制的不足,用DSP56311 作为核心,以数字控制的方法,实现对该模型飞机飞行动作的实时控制,解决了控制信号数字化的问题。
2009-04-16 10:28:0630 针对电动遥控飞机原有模拟控制的不足,用DSP56311 作为核心,以数字控制的方法,实现对该模型飞机飞行动作的实时控制,解决了控制信号数字化的问题。
2009-05-15 13:42:4721 卫星导航信号仿真系统是一个实时性要求很高的射频信号仿真系统,它主要模拟包含多种信息的高精度射频信号。首先介绍了卫星导航信号仿真系统,与一般的仿真系统相比,它具
2009-05-26 16:05:3219 设计了自动导航车(AGV)的驱动模块,建立了三轮式AGV 的运动学模型,获得了运动控制规律。以直线和“8”字形为参考轨迹,进行仿真跟踪。仿真结果验证了控制策略的有效性和正
2009-12-18 11:55:046 飞行仿真器导航系统为飞行仿真器的其他系统提供重要的相关信息,包括飞机的位置、高度、速度、加速度以及飞机当前姿态等参数,飞行仿真器导航系统的研究是飞行仿真器研
2010-01-11 11:30:5737 控制器设计的简介;NI的解决方案:LabVIEW系统辨识工具包、LabVIEW控制设计工具包、LabVIEW动态系统仿真工具包、PXI实时控制器。基于LabVIEW的直流电机PI速度控制器设计
2010-09-28 10:48:1847 开放式控制平台及其在无人潜航器制导系统中的应用
重点分析了开放式控制平台(OCP)的基本结构和中间件技术,并针对目前无人潜航器(UUV)制导系统存在的开发局限
2009-05-14 18:42:13888 
流控制机制,流控制机制原理是什么?
可以将网络服务分为最优的无连接服务或可靠的面向连接的服务。在Internet协议集中,IP属于最优服
2010-03-20 15:22:35611 通道控制设计的双余度DSP解决方案
具有自动控制功能的电子设备已广泛应用于我国多型机上,用于飞机上各机载设备的控制、调节等功能。如图1所示,其控制系统主要
2010-05-27 10:02:29874 
众所周知,激光制导武器是以敏感到的特定激光信号为制导信息。在激光制导武器的半实物仿真系统中,目标仿真和制导仿真具有同等重要的地位。这是因为激光目标模拟的准确性
2010-06-22 11:16:541054 
目前在导航接收系统中,通常需要控制盒来完成对机载设备的加电、工作频率或波道的转换、系统音量、显示亮度等功能的操作与控制。文中介绍某导航控制盒的应用范围、工作原理及电
2012-02-27 11:29:5833 在最终的系统中,我们使用多个LabVIEW I/O模块来仿真一些无人机航空电子和逻辑传感器以及激励器接口。
2012-12-17 19:04:39992 
为满足无人机控制律参数调节及后期控制策略优化的需要,以某型无人机为应用背景,提出了一种无人机飞行控制系统地面仿真平台的设计方案。首先分析了该平台的总体设计方案,然
2013-05-06 11:15:44136 无人机一般由飞行控制系统控制其在全自主状态下飞行,因此进行无人机的飞行剖面实时仿真变得越来越重要。通过利用matlab/simulink工具搭建无人机飞行控制仿真模型,将预先制订好的
2013-05-06 11:17:1137 飞思卡尔半导体现推出带ARM Development Studio5开发环境的Vybrid控制器解决方案,简化了需要丰富人机界面,连接性、确定性实时控制和响应功能的传统复杂应用开发。
2013-07-11 15:03:08797 针对某无人机导航控制系统,设计了基于 DSP 的机载导航系统软件,提出了一种模块化的设计思想,阐明了模块化的设计思路,给出了导航软件的部分组成及其实现的功能,最后在此设
2013-09-03 15:34:1948 导弹制导控制的基本书籍
有兴趣的朋友下来看看
2015-12-29 16:49:130 巡航控制是保证车辆安全行驶的基本功能之一,更是车辆自主行驶的关键技术。针对无人车的巡航控制问题,本文首先回顾和评述了前人的研究工作,然后选择了一款两轮驱动的无人车模型,考虑了安全车辆之间相对距离
2016-01-04 15:10:490 电机控制应用解决方案 ,对于控制很有用的PDF
2016-01-06 15:04:420 澳大利亚交通安全局(ATSB)2日发布有关MH370搜寻的最新报告,称在飞机坠入海中时,处于无人控制的状态。
2016-11-02 15:01:462714 Toshiba 汽车环境控制系统解决方案
2017-01-14 15:20:3110 Renesas 汽车导航解决方案
2017-01-14 15:20:3128 云计算环境下的移动视频传输速率控制机制_邹露宁
2017-01-03 15:24:450 环境中执行各类任务,必然面临着来自自主控制的巨大挑战。先进飞行控制和导航技术作为最主要的支撑技术,目前只能适应相对结构化任务环境的要求,而距解决动态。不确定环境下的自主飞行控制问题尚有很大的差距,本文在分析无人机自主控制的概念和研究现状的基础上
2017-10-13 15:24:387 面向丰富实时应用的Vybrid控制器解决方案,简介
2017-10-31 14:20:554 为增强飞行学员飞机航向控制理论直观教学效果,采用MCS-51单片机作为系统CPU,完成了飞机航向控制系统仿真动态模型平台的设计。通过模拟飞机操纵机构控制,直接利用汇编语言即可实现仪表显示功能。试验结果表明,系统响应速度快,控制显示功能直观,课堂教学效果好。
2018-03-26 15:58:001938 
知名飞机制造商空中客车如今在地面的测绘方面也拥有不少的数据,并且将开卖这些导航数据,而这些测绘数据是由无人机进行测绘的,据悉这样测绘的效率更高。
2018-05-08 11:17:587641 本文设计的激光驾束制导信息场仿真系统主要是为了满足在实验室环境下对激光驾束制导信息场检测和对检测设备标校的要求。以信息场相应参数为依据,用FPGA 设计了相应的功能模块,实现了通过控制激光器及其驱动
2018-09-29 17:23:2913 无人机通常依靠GPS进行定位、导航和飞行控制。一项新技术使用激光雷达数据和先进的机载算法实时提供可靠和准确的定位和导航,而不需要GPS。 这种创新的扫描装置将使无人机能够在地下环境中导航。澳大利亚
2020-07-20 08:31:38935 遭受莫名疾病,例如SARS、禽流感等。环境的恶劣又使得人类的身体素质下降。接下来工采网小编和大家一起看看氧化锆氧气传感器在制氧机制氧控制系统中的应用解决方案。 氧气是人类生存必不可少的气体,在日常生活尤其是医疗
2021-02-20 16:29:001582 无人机的定位工作主要是由导航系统完成,导航系统实时闭环输出位置和姿态信息,为飞机提供精确的方向基准和位置坐标,同时根据实时姿态信息对飞机飞行状态进行预测,引导无人机按照指定航线飞行,被称作是无人机的“眼睛”。
2020-11-06 11:12:203137 随着对垂直起降飞行器研究的深入,飞行控制律的设计逐渐成为硏究的重点。文中研究了小型复合式无人机飞行控制律的快速设计与验证方法。选定一种小型复合式无人机布局方案,设定飞行任务剖面,以飞行任务为导向
2021-04-23 09:38:5721 电子发烧友网为你提供PCB板控制导线阻抗会遇到哪些问题?怎么解决?资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
2021-04-29 08:46:0718 基于北斗导航的无人艇运动导航控制系统
2021-06-30 15:13:1513 基于dSPACE的伺服控制模型实时仿真研究(通信电源技术国家级)-该文档为基于dSPACE的伺服控制模型实时仿真研究讲解文档,是一份很不错的参考资料,具有较高参考价值,感兴趣的可以下载看看………………
2021-09-15 13:49:0610 借助现代人工智能算法,多旋翼无人机可以成为智能代理,在未知环境中导航。给定目的地,无人机可以控制环境,重建环境地图并动态规划到目的地的轨迹。这项工作的目的是构建一个端到端的网络用于研究和教育目的的模拟环境。这里,端到端指的是在一个模拟器中验证所有感知、反应和控制算法的能力(图1a)。
2022-04-06 15:00:364080 。 宇凡微为企业提供了一种玩具遥控飞机方案,基于2.4g合封芯片开发,可以实现多种功能,一起看看吧。 玩具遥控飞机方案工作原理: 玩具遥控飞机采用减速牙轮或螺杆作为舵机。然后与定位器配合,控制飞机的导航。目前,舵机主要由以下
2023-08-03 11:49:43582 迅为RK3588核心板无人机控制解决方案
2023-05-15 15:42:48824 
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论