汽车的新能源化、智能化除了在动力方面给汽车带来根本性的变化,在汽车底盘线控化方面也成为一种发展趋势。其中电子液压制动(Electronic HydraulicBrake,EHB)和电子机械制动
2023-09-09 10:43:56 657
657 
制动系统向线控发展 在燃油车时代,主流采用真空助力式液压制动系统,这套系统由制动主缸、真空助力器、液压管路、制动器组成。液压的概念很容易理解,通过驾驶员踩下制动踏板来推动制动主缸活塞工作,通过液压管道来控制制
2023-05-31 01:05:001221 共赢将于2016年9月25日-27日在国家会展中心上海举办“2016上海国际汽车教学与驾驶员培训设备展览会”。此次展会将聚集国内外汽车教学与驾驶培训设备生产相关企业,增进汽车教学与驾驶培训设备企业
2016-01-29 14:31:11
模拟考试一点通公众号结合国家汽车驾驶员(初级)考试最新大纲及汽车驾驶员(初级)考试真题汇总,有助于汽车驾驶员(初级)理论考试考前练习。1、【判断题】()手动档汽车在启动时,变速器操纵杆可以在一档位。(×)2、【判断题】()汽车行驶时,和侧向道路上车辆的间距与行驶速度无关。(×)...
2021-08-31 09:11:21
模拟考试一点通公众号结合国家汽车驾驶员(初级)考试最新大纲及汽车驾驶员(初级)考试真题汇总,有助于汽车驾驶员(初级)实操考试视频考前练习。1、【判断题】()手动档汽车在启动时,变速器操纵杆可以在一档位。(×)2、【判断题】()汽车行驶时,和侧向道路上车辆的间距与行驶速度无关。(×)...
2021-08-31 07:35:19
题库来源:安全生产模拟考试一点通公众号小程序2020年汽车驾驶员(初级)考试题及汽车驾驶员(初级)模拟考试题库,包含汽车驾驶员(初级)考试题答案和解析及汽车驾驶员(初级)模拟考试题库练习。由安全生产
2021-08-31 06:41:36
通公众号结合国家汽车驾驶员(初级)考试最新大纲及汽车驾驶员(初级)考试真题出具,有助于汽车驾驶员(初级)怎么考考前练习。1、【判断题】()手动档汽车在启动时,变速器操纵杆可以在一档位。(×)2、【判断题】()电流表在3—5A到零之间摆动,为点火系故障。(×)3、【判断题】()汽...
2021-08-31 07:21:47
题库来源:安全生产模拟考试一点通公众号小程序汽车驾驶员(中级)考试是安全生产模拟考试一点通生成的,汽车驾驶员(中级)证模拟考试题库是根据汽车驾驶员(中级)最新版教材汇编出汽车驾驶员(中级)仿真
2021-08-30 09:05:41
题库来源:安全生产模拟考试一点通公众号小程序2021年汽车驾驶员(初级)多少钱及汽车驾驶员(初级)证考试,包含汽车驾驶员(初级)多少钱答案和解析及汽车驾驶员(初级)证考试练习。由安全生产模拟考试一点
2021-08-31 07:37:11
题库来源:安全生产模拟考试一点通公众号小程序2021年汽车驾驶员(初级)实操考试视频及汽车驾驶员(初级)考试软件,包含汽车驾驶员(初级)实操考试视频答案和解析及汽车驾驶员(初级)考试软件练习。由安全
2021-08-31 07:55:51
题库来源:安全生产模拟考试一点通公众号小程序2021年汽车驾驶员(初级)考试平台及汽车驾驶员(初级)考试申请表,包含汽车驾驶员(初级)考试平台答案和解析及汽车驾驶员(初级)考试申请表练习。由安全生产
2021-08-31 07:14:48
练习。2021年汽车驾驶员(初级)考试报名及汽车驾驶员(初级)试题及解析1、【单选题】驾驶员驾驶机动车辆倒车时,在倒车操作之前不用观察的事宜有()。(B)A、车顶上方高度B、车前的距离C、有无障碍物D、车后的距离2、【单选题】发动机技术状况良好,点火系工作正常,若发动机怠速不稳,应检查()。...
2021-08-30 07:55:46
生产模拟考试一点通公众号结合国家汽车驾驶员(高级)考试最新大纲及汽车驾驶员(高级)考试真题汇总,有助于汽车驾驶员(高级)模拟考试题库考前练习。1、【判断题】()汽车制动侧滑是指汽车在制动时发生纵向滑动。(×)2、【判断题】()汽车打滑时,卸下部分或全部货物可以增加滚动阻力。(×)...
2021-08-31 08:03:45
题库来源:安全生产模拟考试一点通公众号小程序汽车驾驶员(高级)试题及解析是安全生产模拟考试一点通生成的,汽车驾驶员(高级)证模拟考试题库是根据汽车驾驶员(高级)最新版教材汇编出汽车驾驶员(高级)仿真
2021-08-30 07:09:41
。尽管很多仪器生产厂商在设计系统时,都在着力推广各种总线中的某一种,但实际上结合多种仪器总线和平台设计一种混合系统会是更好的选择。混合测试系统将来自PXI,VXI,USB,LAN和GPIB等多种ATE
2009-02-25 23:36:05
电子制动系统的结构及特点是什么电子制动系统开发过程中的关键问题电子制动系统原理样机的模块化设计
2021-05-12 06:18:40
的车速保持一致。汽车在良好路面上长时间行驶时,驾驶员启动巡航控制系统并设定行驶速度,不需驾驶员操纵加速踏板,通过巡航控制系统即可自动保持既定的行驶速度,不仅减轻了驾驶员的劳动强度,同时利用先进的电子控制技术控制节气门的开度,比驾驶员操纵节气门更精确,汽车燃料经济性、排放污染性也可得到改善。
2020-03-31 07:15:47
制动时,它能使车轮保持转动,从而帮助驾驶员控制车辆达到安全的停车。这种防抱制动系统是用速度传感器检测车轮速度,然后把车轮速度信号传送到微电脑里,微电脑根据输入车轮速度,通过重复地减少或增加在轮子上的制动
2021-02-20 14:23:42
不止是增加了一些舒适功能如车内手机无线连接、个人环境调节系统那样简单,许多新科技的设计均围绕数据传感和处理(即所谓的高级驾驶员辅助系统(ADAS)),确保驾驶者对道路状况和实时周边环境有更全面的了解
2018-08-29 16:17:56
定本文首先运用功率键合图方法对AMT 液压系统建立了较为完善的高阶时变非线性状态方程通过仿真实验可在实际装配出完整的液压执行机构前对机构的动态特性和应用效果有较为准确的预测从而大大缩短了液压系统的开发周期
2009-04-16 13:57:57
DMS驾驶员监控系统的功能
2021-02-22 06:11:43
之前谈增程式电动汽车仿真平台时,用过下图的仿真软件架构。最近一段时间,我们想尝试搭建一个丰田THS系统仿真平台,其基本架构也是一样的。驾驶员模型部分一样,不用修改;控制策略部分需要大改,因为混动控制
2021-08-27 07:59:14
项目名称:车载驾驶员状态检测设备开发试用计划:想找到一款合适的低功耗电源IC
2019-11-28 17:46:46
驾驶员监控系统,即 DMS(Driver Monitor System),是利用安装在车上的传感器,在驾驶员驾驶过程中,通过接触或非接触的方式,实时监控驾驶员的状态,能够检测到驾驶员危险驾驶行为,并提醒驾驶员的设备或功能。 (图片来自网络,侵删)
2019-09-16 10:36:34
如何优化单片机仿真实验平台界面
2013-05-29 15:40:37
风险时,系统可以向驾驶员提供警报!此外,这些系统通常提供自适应巡航控制、盲点检测、车道偏离警告、驾驶员困倦监控、自动制动、牵引控制和夜视等动态特性。
2019-08-12 07:25:59
我们有以下要求 1)车辆驾驶员人脸检测或驾驶员不在2) 计算驾驶员眨眼次数3)检查司机的张嘴度(哈欠检测)4)检查驾驶员的头部位置(Head Tilt) 对于以上要求,MX RT1170是否足以检测睡意?如果不是,请建议合适的零件号。
2023-03-15 08:05:01
道路安全从摩尔定律中受益良多,处理能力的提升以及 CMOS 图像传感器 (CIS) 和其他传感器技术的发展,让车辆制造商得以推出高级驾驶员感知系统 (ADAS)。ADAS 能增强驾驶员对周边环境的感知,减少发生碰撞的概率。部分系统还能够监控驾驶员并向驾驶员发出告警,例如在驾驶员打盹时。
2020-05-13 08:12:39
)全新的DRA75x信息娱乐处理器。接着,我们把自己的信息化高级驾驶员辅助系统(ADAS)概念应用到下一个步骤,并在2015年国际消费电子展(CES)上实现了一种能在单个“Jacinto 6 Ex
2018-09-07 14:41:15
在安全和便利性能特点的双重驱动下,对驾驶员辅助系统的需求增长,令车中具备成像功能的系统数量也在迅速攀升。这类先进驾驶员辅助系统可实现自适应巡航控制和自动紧急制动等功能。除此之外,还包括停车辅助功能
2018-10-26 08:56:41
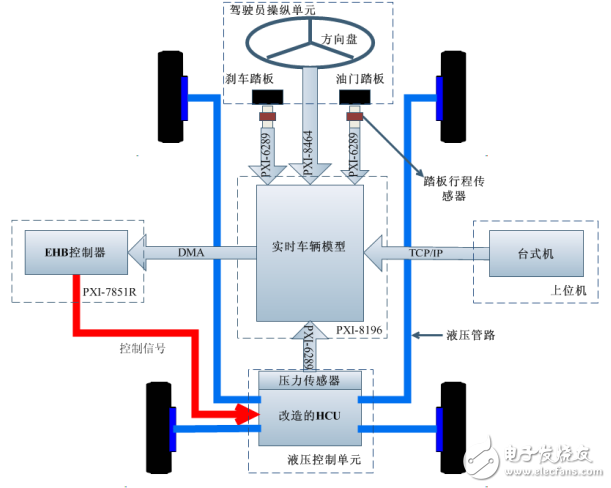
信号,通过NI-9403的数字量输出功能来控制电机和电磁阀的动作。在执行器方面,液压控制单元采用Bosch(博世)的ESP 8.0的液压控制单元。制动系统采用金杯客车的制动管路和制动器。仿真平台搭建
2011-09-07 09:09:25
混联式混合动力系统的子系统众多,其中整车控制器作为实现驾驶员驾驶需求和能量安全的管理系统,需要协调发动机、扭矩、电机和电池的功率在不同工况下的合理分配,实现制动能量回馈,并控制外围设备(如空调、灯光
2019-10-21 08:06:44
,计算出驾驶员的疲劳程度。当疲劳程度超出一定数值时,仪表板上就会有咖啡杯等图标闪亮,警告驾驶员需要休息。博世的瞌睡驾驶预警系统所需信息通过车辆的电动助力方向盘,或者ESC(防侧滑装置)的部件——操舵角传感器获得。无需追加传感器,性价比出色。可配备在乘用车和小型商用车上。来源:21ic电子网
2012-05-17 18:28:50
如何使用labview制作数字电路仿真实验平台?各位大神,给点参考,谢谢了
2013-03-26 10:03:19
本文作者:德州仪器 Jeramie Bianchi车镜中的物体比其看起来更近——这一信息是经过验证的真实安全警告,几十年来一直提醒着驾驶员们,后视镜所反映的视野与现实稍有差距。尽管有其局限性,但车镜
2019-08-05 08:23:51
本文应用时间触发模式设计了液压式制动能量再生系统的电子控制系统混合调度器,实现了HBRS的基本功能。
2021-05-13 07:07:06
论文题目是:基于虚拟仪器技术的驾驶员注意力监测控制系统,做了很长时间了,实在没思路,进展不下去,跪求大神们指点,能够给我一个思路和方向。
2015-05-24 17:38:46
。然而,如今先进的驾驶辅助系统(ADAS)超越了车镜的反射,通过摄像头为驾驶员提供了基于驾驶座位的扩展视角。摄像监控系统(CMS)也被称为电子镜或智能镜,旨在以摄像头和显示屏的形式提供车镜体验。想象一下
2022-11-10 06:22:00
,但车镜仍是汽车上的重要设备,可帮助驾驶员掉头或变道。然而,如今先进的驾驶辅助系统(ADAS)超越了车镜的反射,通过摄像头为驾驶员提供了基于驾驶座位的扩展视角。摄像监控系统(CMS)也被称为电子镜或智能
2019-03-05 06:45:08
平台版本 Multisim14.1参考书籍《MULTISIM14电子系统仿真与设计第2版》10.3.5有源滤波器电路的仿真实验与分析典型的滤波器电路是由电阻与电容( 或电感)串并联构成的RC或RL选
2021-12-31 06:29:52
本文主要围绕模糊综合评价方法在驾驶员考核系统的应用作了以下几个方面的研究:1. 以汽车驾驶模拟器作为试验平台,建立驾驶员电子考核系统。2. 通过对驾驶员视线点理论的研究,深入分析了道路交通环境
2010-12-28 10:24:19
模糊综合评价方法在驾驶员电子考核系统中的应用本文主要围绕模糊综合评价方法在驾驶员考核系统的应用作了以下几个方面的研究:1. 以汽车驾驶模拟器作为试验平台,建立驾驶员电子考核系统。2. 通过对驾驶员
2009-12-02 12:34:12
本文选定了NI公司的PXI和CompactRIO方案完成平台构建,研制开发了一套基于PXI的CNG/汽油两用燃料发动机ECU在环仿真系统,进行了发动机ECU在环仿真试验。
2021-05-13 06:30:16
可以说,信息娱乐系统是将普通车辆变成智能车辆的“催化剂”;智能车辆是指:可以提供优异娱乐设施(如后座娱乐),以及提供能够辅助驾驶的技术(包括驾驶员辅助停车入位、警告驾驶员交通路线拥挤并建议替代路线
2019-07-16 09:14:06
汽车驾驶模拟器实时仿真虚拟系统开发本课题介绍了一个分布式仿真实验支撑软件平台 虚拟系统的思想设计与开发并给出了虚拟系统集成与应用示例虚拟系统 的概念是实验室根据多年的开发型汽车驾驶模拟器仿真开发经验
2009-12-02 12:48:10
仿真系统本文根据发动机特性数学模型汽车运动模型驾驶员离合器操作模型汽车驾驶换挡工况最佳操作模式汽车制动过程分析汽车方向控制模型以及汽车驾驶员考核仿真系统中诊断程序的数值概率分析方法建立了汽车驾驶员操作
2009-12-02 12:46:20
驾驶员修正车辆位置。目前,AutoVue系统已经在欧洲的多种货车上作为一个选件进行了装备。3.Mobileye_AWS系统该系统由总部设在荷兰的Mobileye公司研制。该系统利用安装在前风窗玻璃上
2018-11-06 09:23:12
测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB 系统也会启动,使
2017-10-18 17:18:24
FZI信息技术研究中心是一家来自德国的科研机构,驾驶员状态监测系统目前还处于原型阶段,它使用了嵌入式以及传感器技术,能够在行车过程中监测驾驶员的生命体征数据。车内的一个摄像头可以监测驾驶员的心率、眨眼频率、头部姿势以及当前情绪等因素,从而对驾驶员的状态进行持续评估。
2020-08-20 07:57:46
,当驾驶员踩下制动踏板后,电动泵使制动液增压产生所需的制动力,制动控制与电机控制协同工作,确定电动汽车上的再生制动力矩和前后轮上的液压制动力。再生制动时,再生制动系统控制回收制动能量,并且反充到蓄电池
2011-07-13 09:30:51
无钥匙系统 一种新型的“免钥匙”技术有望在今后成为市场主流。而它采用的正是近年来刚刚兴起的、技术。 这种系统被称之为“驶向未来的钥匙”。使用这种技术,在驾驶员靠近汽车一米范围以内,无需钥匙
2008-07-09 11:20:35
` 总是有一些争论,如行驶中的汽车应由电子还是驾驶员来控制,但在许多案例中已没有争论。许多豪华车在即将碰撞的情况下将自行刹车。安全气囊会直接弹出而不会预先征询许可。ABS系统泵无需我们配合就刹车
2015-08-28 10:01:38
高级驾驶员辅助系统(ADAS)解决方案是增长最快的汽车行业之一;根据Strategy Analytics的预测,该领域预计在五年间(2015-2020)增长了10%。即使是入门级模型的设计者也期望
2022-11-14 07:11:26
的技术可行性。如今,我们对防抱死制动系统 (ABS) 及安全气囊等被动安全系统,或者电动助力转向系统与电子发动机管理都已习以为常了。这些系统能使汽车采取行动…
2022-11-22 06:43:30
而言,我们关注的是自动驾驶汽车的技术可行性。如今,我们对防抱死制动系统 (ABS) 及安全气囊等被动安全系统,或者电动助力转向系统与电子发动机管理都已习以为常了。这些系统能使汽车采取行动(制动、转向
2018-09-14 11:03:54
时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。同时车内音响会发出警报声音提醒走神的驾驶员注意,它能
2019-04-03 00:01:51
概述随着智能驾驶系统功能的提升,驾驶员与智能驾驶系统之间的交互功能越来越多,测试的复杂度也越来越高。经纬恒润新推出的虚拟驾驶仿真平台,可以在实验室环境下提供逼真的虚拟驾驶场景、真实的驾驶座舱环境
2022-06-07 11:34:49
电子技术仿真实验教程为各类职业学校电子技术专业电路仿真所编写的教材。本书共分为九章,第1章PROTEL 99SE仿真软件的使用,第2章 MULTISIM2001仿真软件的使用,第3章
2009-03-19 10:34:03 168
168 针对液压系统动态特性仿真问题,分析了节点法建立液压回路数学模型的方法,用容腔节点表征回路的压力变化,对与容腔节点相连的液压元件则建立其流量方程。研究了在SIMULINK下
2009-05-09 13:12:2024 液压基本回路的拼装一 实验目的通过本次实验,使学生运用所学到的液压传动知识,能独立设计、拼装几种常见的液压基本回路,并能测出该回路的性能参数,加深对几种
2009-05-15 00:00:0349 简述引起双管路气压制动系统失灵的原因及预防措施。关键词: 双管路 气压制动 系统 失灵Abstract: The causes of failures of double p ipes w ith A ir2brake system and its p reventive measures are
2009-07-25 09:19:0329 基于LabVIEW的数字仿真实验平台的设计
利用虚拟仪器软件开发平台,在计算机上通过对前面板和后面板的编写来完成实验室及电子课程实验教学中所涉及的数字
2010-03-30 16:06:57110 本文以LabVIEW为开发平台,利用其PID控制工具包,开发了自控原理仿真实验系统,并以“二阶系统的阶跃响应“为例详细叙述了仿真实验系统的设计过程。
2010-07-14 16:02:4142 气压制动系统ABS/ASR装置的工作原理与检修
一、ABS装置的工作原理与检修 气压制动系统的防抱死和防滑转装置的工作原理,与液压制动控制系统的同类装置
2009-11-21 09:50:425192 液压制动的终结-电子制动(EMB)技术发展简介
随着消费者对车辆安全性日益提高的重视,车辆制动系统也历经了数次变迁和改进。从最初的皮革摩擦制动,到后来出
2009-11-21 16:21:328884 引言一种液压式制动能量再生系统(HBRS)应用于对公交车动力系统的改造。由电磁离合器、液压泵马达和液压蓄能器以及相关的机械装置和油路构成的车辆制动能量回收再生装置
2010-09-23 15:57:41935 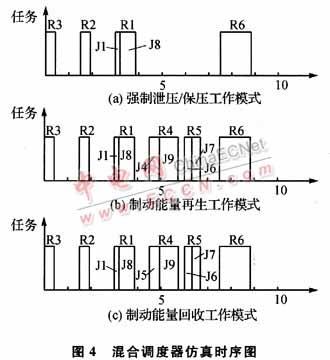
EHB是一种线控制动(brake-by-wire)系统,它以电子元件替代了部分机械元件,制动踏板不再与制动轮缸直接相连,驾驶员操作由传感器采集作为控制意图,完全由液压执行器来完
2010-09-25 11:46:4814747 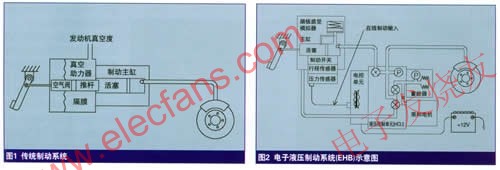
本文基于PXI和cRIO搭建了ESP硬件在环仿真平台。平台可以将控制器放在仿真回路中,方便对控制器中的算法进行测试。仿真试验台的搭建提高了ESP控制算法的开发速度。
2011-08-26 10:31:276238 
混合信号测试的概念与挑战基于PXI的混合信号测试平台基于NI PXI的混合信号测试应用案例
2011-12-13 17:30:0829 某型装甲车驾驶员终端仿真训练系统设计与实现_石志强
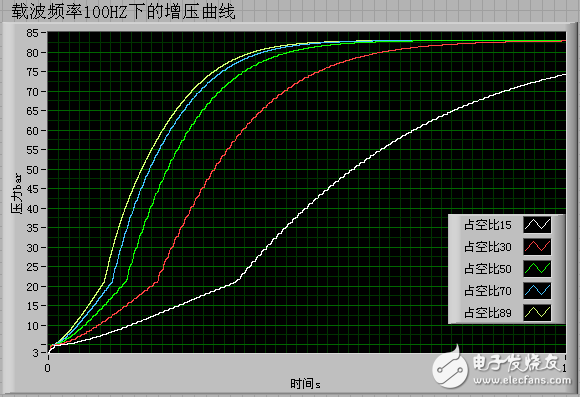
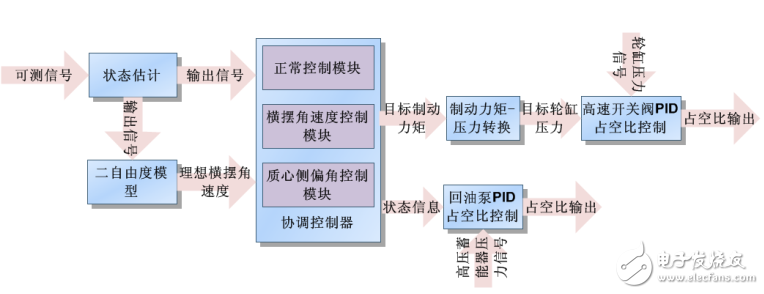
2017-03-14 08:00:001 EHB系统作为一种多功能制动系统,将传统制动系统的所有制动功能集合在一个整体上,弥补了传统制动系统的不足。EHB系统中高压蓄能器作为液压控制机构的动力源,以PWM方式驱动高速开关阀控制轮缸压力,通过
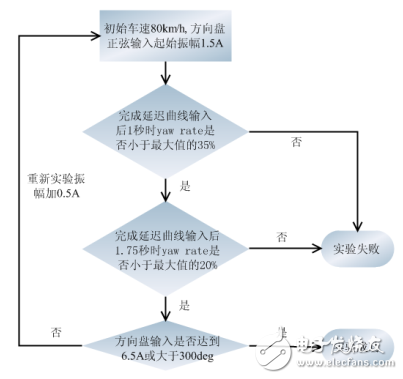
2017-11-20 16:40:015 EHB系统是一种先进的线控制动系统,具有防止ABS工作时制动踏板抖动、制动响应快、制动压力上升梯度大、可集成ABS、TCS、ESP功能等优点,适用于混合动力汽车及电动汽车。为了给后续实际搭建实验
2017-11-21 16:06:37135 EHB系统试验台架主要由EHB液压执行机构和EHB电子控制系统两部分组成。两个系统彼此紧密相连,共同作用。EHB电子控制单元通过数据采集系统将(轮速,横摆角速度,侧向加速度,压力,方向盘转角等)车辆
2017-11-21 16:08:008 为了解决目前高校机械专业实验设备价格昂贵、数量少、安全性差等问题,本文构建了一套基于Unity3D技术,具有高仿真性、强交互性的冲压成形虚拟仿真实验系统。通过对模型的建立与优化、系统漫游、碰撞检测
2018-01-10 15:50:580 易造成驾驶员疲劳,增加工作强度,降低工作效率。以某21 t液压挖掘机为例,对大惯量负载回转液压系统启动、制动平稳性进行实验分析与研究。结果表明,缓冲溢流阀和防反转阀的组合使用能有效减小制动时的液压冲击与晃动,提
2018-03-19 15:25:260 研究;建立了液压再生制动系统试验台数学模型,基于Matlab/Simulink建立了液压制动能量回收系统的仿真模型,并进行了与台架相对应的仿真实验,研究了液压制动能量回收系统的能量回收效率;对液压制动能量回收系统进行了整车研究
2018-03-26 11:01:531 液压混合动力装载机在制动及能量分配过程中,由于多个子系统的引入而导致的传统联合控制策略难以通过最优化来提高整车燃油经济性,针对这个问题,提出一种基于模糊控制的液压装载机多系统联合制动控制策略。该策略
2018-03-26 14:02:351 液压混合动力装载机在制动及能量分配过程中,由于多个子系统的引入而导致的传统联合控制策略难以通过最优化来提高整车燃油经济性,针对这个问题,提出一种基于模糊控制的液压装载机多系统联合制动控制策略。该策略
2018-03-27 10:31:510 若储能器已经被完全充满,再生制动就无法实现,所需的制动力就只能由常规的液压制动系统来提供。现在几乎所有的电动汽车都安装了再生液压制动系统,从而可以实现节约制动能、回收部分制动动能,并为驾驶员提供常规制动性能。如图6-3所示为电动汽车的能量转换。
2019-02-12 09:36:215337 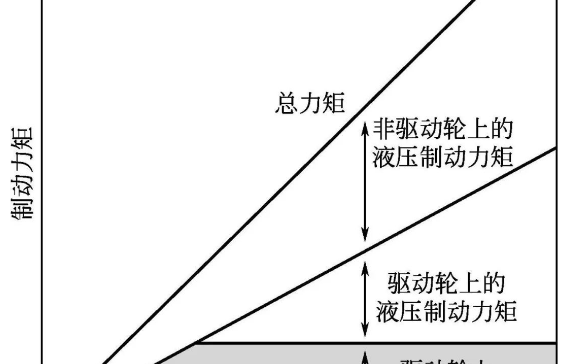
电子液压制动系统(EHB)是在传统的液压制动器基础上发展而来的。操纵机构用一个电子式制动踏板替代了传统的液压制动踏板,取消了体积庞大的真空助力器。
2019-11-04 08:00:001 当前车辆对制动性能的要求越来越高,传统制动系统由于结构和原理的限制在提高制动性能方面潜力有限,电子液压制动系统(EHB)作为一种新型的制动系统弥补了传统制动系统的不足,可以很大限度地提高车辆制动性能。
2021-03-24 14:16:418500 液压缓冲器阻尼与冲击特性的仿真实验分析
2021-07-02 15:14:1812 , EMB)。其中,EHB 以传统的液压制动系统为基础,用电子器件替代了部分机械部件的功能,使用制动液作为动力传递媒介,同时具备液压备份制动系统,是目前的主流技术方案。进一步地,根据集成度的高低,EHB 可以分为Two-box 和One-box 两种技术方案。
2023-06-01 16:47:361189 
概述随着智能驾驶系统功能的提升,驾驶员与智能驾驶系统之间的交互功能越来越多,测试的复杂度也越来越高。经纬恒润新推出的虚拟驾驶仿真平台,可以在实验室环境下提供逼真的虚拟驾驶场景、真实的驾驶座舱环境
2022-06-08 11:33:48470 
EasyGo实时仿真实验系统旨在为电气相关专业的本科生和研究生提供技术领先、性能优异的创新实验平台,基于该建设方案构建的创新实验基地,能够辅助本科生和研究生进行 、选修课的教学和实验。EasyGo
2023-12-04 10:52:23340 
概述 随着智能驾驶系统功能的提升,驾驶员与智能驾驶系统之间的交互功能越来越多,测试的复杂度也越来越高。经纬恒润新推出的虚拟驾驶仿真平台,可以在
2021-04-27 17:01:28
 电子发烧友App
电子发烧友App
















 工商网监
工商网监
评论