 电子发烧友App
电子发烧友App


1引言
GPS功能已成为智能手机的标准配置。随着便携式设备市场的爆发性成长,手机环境下的射频干扰,已经成为GPS系统设计者最为头疼的问题之一。在如此嘈杂的射频干扰环境下设计高灵敏度的GPS系统,已经是手机设计中最大的挑战。
本文将对采用前置低噪声放大器的GPS系统进行研究,通过增加前置低噪声放大器的方法,GPS系统的灵敏度和首次定位时间将得到明显提高,且抗干扰能力更强。
2 GPS系统简介
目前GPS功能已成为智能手机中的标准配置。导航服务是GPS的一大应用,在手机中集成GPS,可以非常轻松地实现车辆的自主导航,用户将不再因为迷路耽误自己的行程,便捷而实用。越来越多带GPS功能的手机反过来将会推动位置服务(LBS)的发展。LBS应用通过手机的位置信息可以滋生出很多增值服务,比如帮助用户找到附近的饭店、银行、交通服务设施等,这种服务将是未来信息领域一个主要的新兴市场。在可预见的未来,GPS功能将会随着手机功能的拓展而衍生出越来越多的应用。
但是与此同时,手机中集成的GPS系统也面临着日益严重的问题。随着无线通信技术的快速发展和手机功能的不断增多,各种射频标准的相互干扰问题凸显。目前手机中集成的射频标准主要有第二代数字通信标准GSM,第三代TD-SCDMA/WCDMA,蓝牙 Bluetooth,调频收音FM-radio,无线局域网WLAN等等。在设计手机系统时,必须考虑电磁干扰(EMI)和电磁兼容EMC)的问题,以避免相应的功能受到环境干扰而性能受损,甚至无法工作的恶劣影响。尽管各个国家和地区已经建立了相应的电磁规范以规避上述问题,但手机设计和制造厂商依然面临着日益复杂和严峻的挑战。
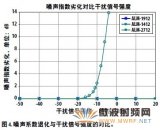
相对于其它无线通信系统而言,GPS系统的输入信号功率非常微弱。按照GPS系统的设计规范,GPS信号是从距离地面约两万公里的低轨卫星上发送到地面上的固定或移动装置,以地面接收装置距离卫星的地平面仰角50度为例,GPS的L1频段中心频率为1575.42MHz,则自由空间衰减F可由下式计算:
 (1)
(1)
则接收到的GPS信号L1频段功率Pr可近似由下式计算得到:
Pr=Ps-F-Loss (2)
卫星的有效发射功率Ps为26.8dBW,自由空间衰减F约为183dBc,额外的大气损耗Loss约为3.7dBc,这样得到的GPS系统L1频段 CA码信号的地面强度约为-160dBW,即-130dBm。在实际使用过程中,由于卫星发射和地面接收机的仰角不同,以及受树木,建筑,桥梁等的遮挡,一般GPS信号到达地面的强度甚至可能远远低于-130dBm。
而其它的通信系统中,GSM900发射功率为 33dBm,GSM1800和GSM1900均为30dBm,WLAN为14~20dBm,Bluetooth为0到10dBm,其最大强度大约是GPS 信号的10的15次方倍,即1000万亿倍!即使在GPS接收机前端增加传统的SAW带通滤波器,由于干扰信号的频段距离GPS的频段较近,一般只能提供额外的30~40dB隔离度,远远不足以将干扰信号衰减到忽略不计的程度。如此恶劣的射频环境给GPS系统设计带来了非常严峻的挑战。
对系统设计者而言,GPS系统有几个比较关键的设计指标,如灵敏度Sensitivity和首次定位时间(简称TTFF)等等。手机中的GPS系统常常受到外部射频干扰的影响,此时的干扰可以看作噪声的一部分,在降低信噪比参数的同时,灵敏度指标也随着恶化,首次定位时间TTFF延长,直至完全无法搜索到 GPS信号。
让我们来看一下射频干扰是如何影响GPS系统性能的。一般而言,GPS系统的灵敏度可由下式决定:
灵敏度Sensitivity[in dBm]
 (3)
(3)
式(3)中,第一项Eb/N0由GPS系统的基带BPSK解调性能决定的,第二项中,Rb是GPS基带信号码率,C/A码中Rb等于50赫兹,即 20毫秒的相干累积时长所得到的处理增益;第三项Gp是系统非相干积累增益;第四项N0为系统天线端口的热噪声功率谱密度,在室温下等于 -174dBm/Hz,第五项为GPS系统的噪声系数。前三项代表了GPS基带部分所带来的性能限制,而后两项则代表了射频部分所带来的性能限制。在 GPS的系统设计中,灵敏度的提高也是通过提高两个方面来得以实现,一部分是基带的Eb/N0解调性能,另外一部分则是射频部分的噪声系数NF性能。
除了灵敏度是消费者最关心的GPS系统指标之外,首次定位时间(TTFF)也直接影响消费者的切身体验。GPS设备的TTFF与其启动条件有关,可以分为三种情况:一是接收器本身完全无有效卫星数据的冷启动(Cold Start);一是接收器具有有效的星历数据、时间和起始位置,称为暖启动(Warm Start);如果再具有更准确的广播星历数据,则称为热启动(Hot Start)。
对于一个不具任何有效定位数据的GPS终端来说,最重要的是要收齐四颗卫星个别的广播星历及卫星时间数据,才能正确地计算定位。由于卫星是以50bit/s的速率来发射信号,因此同步收齐四颗卫星一个完整帧数据的时间,至少需要30秒(即1500bps),其中需花18秒下载广播星历。因此,冷启动与热启动的定位时间相差甚大,前者所需时间至少需要 18~36秒,接收过程中如果出现了任何干扰而导致信号中断,那就得重新再接收一次。相比较之下,如果在GPS设备的内存中已有完整且有效的广播星历资料,只要确认目前在头顶上的四颗卫星,即可立即进行定位计算,定位动作甚至在1秒之内就可完成。
冷启动的首次定位时间由如下几项组成,接收机启动时间Twarm,捕获时间Tacq,跟踪时间Ttrack,导航电文读取时间Tced+gst,导航方案计算时间TPVT。而热启动仅仅包括捕获时间Tacq,跟踪时间Ttrack。一般而言,Twarm,Tced+gst,TPVT是相对固定的,而Ttrack和Tacq则决定了系统的首次定位时间长短。本文仅考虑射频干扰对Tacq和Ttrack的影响而忽略其它时间项从而简化了分析模型。在捕获和跟踪期间,系统通常有两种处理方法来提高解调增益:相干累积和非相干累积。
相干累积可以较大提高处理增益,但相干时长不能无限加长,因为20毫秒周期的导航电文会带来位翻转,从而影响相干结果。而非相干累积可以采用较大的累积时长来获得更大的增益。但是相对于相干累积而言,非相干累积存在平方损失, 考虑到该损失之后的非相干累积的总增益可由下式计算:
 (4)
(4)
式(4)中第二项为非相干累积所带来的平方损失项,n为非相干累积的次数,直接决定非相干累积的持续时间,在给定检测概率Pd=0.9和虚警概率Pfa=1e-7时Dc(1)约等于21。
3 高性能GPS低噪声放大器对系统性能的提升
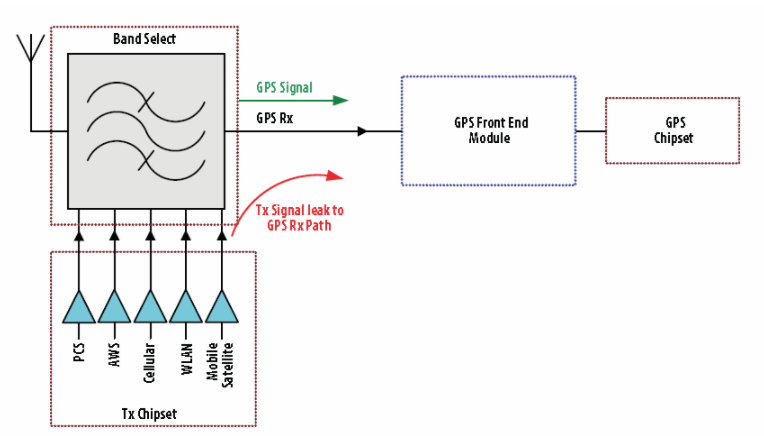
如图1所示,传统的GPS系统解决方案为GPS贴片电感直接与GPS接收IC相连接,该方案具有BOM成本低,占用手机内部空间小,布线简单等优点,但不可忽视的是,该方案的性能指标受到了一定的限制。由于手机内部和周边环境的射频干扰非常嘈杂,GPS接收IC往往会受其影响而导致接收性能下降;除此之外,由于受手机PCB布线局限,GPS贴片天线一般距离接收IC较远,两者之间的PCB走线插损也对系统性能造成了不可忽视的影响。

图1 传统的GPS系统解决方案和改进方案对比
改进方案则加入了SAW滤波器和AW5005 GPS前置低噪声放大器,SAW滤波器可以有效滤除带外射频信号的干扰,低噪声放大器则进一步降低了系统的噪声系数,有效的提高了系统性能。上海艾为电子技术有限公司推出了全新的GPS前置低噪声放大器AW5005,相对于传统方案,AW5005极为有效的提高了GPS系统性能,降低了复杂射频环境下的GPS系统设计难度。
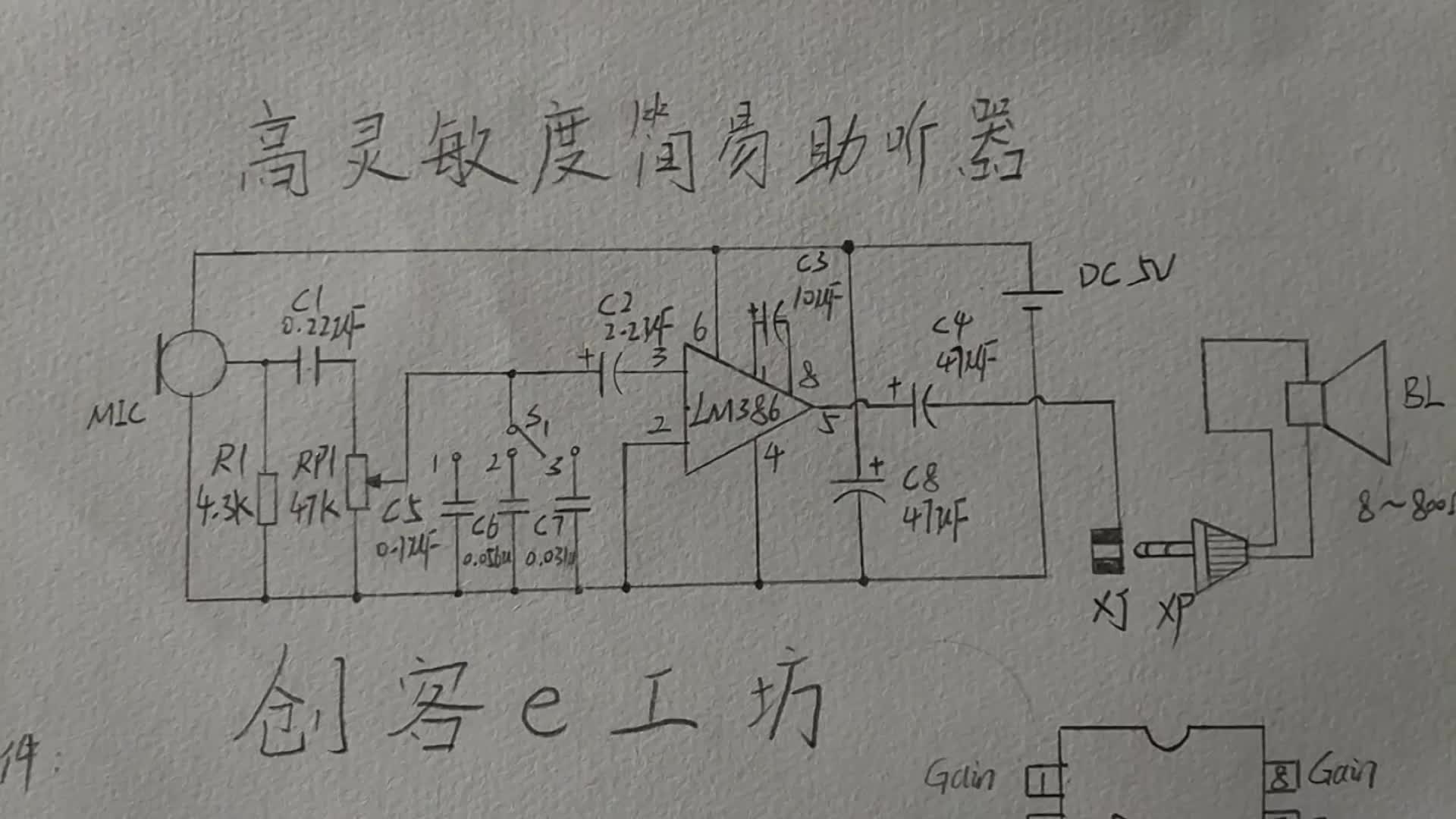
图2所示为没有AW5005和加入AW5005的GPS系统在不同灵敏度下的首次定位时间TTFF的区别。从图2可以看出,无论在高低灵敏度条件下,拥有AW5005的系统TTFF远远小于缺少AW5005的GPS系统。

图2 没有/加入AW5005前端模块的GPS系统在不同灵敏度下的TTFF
我们由公式(3)可知,接收IC前端的噪声系数会影响系统的灵敏度。对于图1中的改进方案,系统的级联噪声系数可由下式决定:
 (5)
(5)
式(5)中,ILSAW为SAW滤波器的插损,NFLNA和PGLNA分别为LNA的噪声系数和功率增益,ILTRACE为走线插损,NFRX为接收 IC的噪声系数。从式(5)可知LNA的噪声系数直接影响灵敏度,在相同的灵敏度要求下,LNA噪声系数越小,首次定位时间也随之变小,其变化的趋势如图 3所示。同理TTFF随LNA的功率增益变化趋势如图所示,LNA的功率增益越大,TTFF越小,当LNA的增益较小时,TTFF的变化趋势较快;当 LNA的功率增益大于16dB时,TTFF受其影响变小。

图3 系统TTFF随LNA噪声系数和功率增益的变化曲线
LNA之前的SAW滤波器可以有效的滤除带外的射频干扰。但是正如前文分析的,GPS的输入信号非常微弱,目前绝大多数的商用SAW滤波器的带外抑制都较为有限,即使经过SAW滤波器的干扰信号依然对GPS的输入信号造成了严重的影响,因此LNA的线性度就至关重要:在相同的输入信号强度下,线性度较差的LNA所需的首次定位时间要比线性度好的LNA长。按照带外干扰信号的类型来划分,主要有如下三种:
(1)带外强干扰造成LNA增益下降,噪声系数上升。
一般手机在GSM频段的最高发射功率可达33dBm,假定GSM天线到GPS/WLAN天线的隔离度为20dB(包括天线之间的VSWR失配),SAW 滤波器的带外抑制为30dB,则LNA输入端看到的最大输入信号功率为-17dBm,当手靠近手机时GSM天线的VSWR会发生明显变化,该强干扰信号的强度可能会高达-15dBm,如此强的干扰会导致LNA输入饱和,从而其功率增益和噪声系数会恶化,GPS系统性能受到严重影响。

图4 系统TTFF随LNA 1dB压缩点的变化曲线
图4所示是TTFF随LNA的1dB压缩点P1dB的变化趋势。带外干扰强度为-15dBm,GPS系统的输入信号强度为-165dBm。从图中可以看出,即使P1dB高于带外干扰信号的强度,其首次定位时间TTFF仍然受到较大的影响;而当P1dB远高于带外干扰信号后TTFF受P1dB的影响变得微乎其微。AW5005可以提高高达-7.6dBm的1dB压缩点,远高于业界同类产品的水平,确保GPS系统不会因为带外强干扰而性能恶化。
(2)带外双音信号经过LNA产生的三阶交调项(Inter-modulation)落在GPS带内。
一个典型的例子是PCS-1900和GSM-1800的带外双音信号经过LNA后产生的交调项正好落在GPS带内。PCS-1900的发射频率为 1851MHz,发射功率为24dBm,假定发射天线距离GPS天线1米,从而在GPS天线处看到的干扰信号强度为-20dBm,经过滤波器在LNA输入端看到了功率为-60dBm。而GSM-1800的发射频率为1713MHz,发射功率为+36dBm,在GPS天线端看到的信号强度为21dBm,则经过滤波器后的强度为-19dBm。经过LNA后,该双音信号产生的三阶交调项频率为:2×1713MHz-1851MHz=1575MHz,正好落在 GPS信号带内,从而恶化了GPS系统的性能。等效到LNA输入端口看到的交调项强度可由下式表示:
Pint=2PGSM+PPCS-2IIP3 (6)
式(6)中PGSM和PPCS分别为双音信号的强度,IIP3为LNA的输入三阶交调点。而带内的干扰信号对GPS系统的信噪比影响如下式[5]:
 (7)
(7)
式(7)中,C/N0为没有干扰信号时的系统载噪比(carrier-to-noise-density-ratio),Pin为LNA输入端口看到的输入信号强度,Q为扩频增益因子,窄带干扰时为1,宽带扩频干扰时为1.5,宽带噪声干扰时为2;Rb为GPS伪随机码率,当GPS信号为C/A码是Rb 等于1.023M,因此可以得到TTFF随LNA的IIP3指标变化趋势如下图所示。AW5005可提供高达+6.5dBm的三阶交调点IIP3,有效的减小了带外多个干扰源对GPS系统的影响。

图5 交调干扰下系统TTFF随LNA 三阶交调点的变化曲线
(3)带外宽带干扰可在单频强干扰的条件下产生互调项(Cross-modulation)落在GPS带内。
除了双音信号的交调项,某个窄带强干扰(Blocker)和宽带干扰信号依然可以产生带内的互调项从而影响性能。比如,GPS手机邻近的移动设备无线局域网(WLAN)正在工作,最大发射功率为20dBm,则LNA输入端接收到的信号功率为:
 (8)
(8)
式(8)中,F为WLAN发射源到手机GPS天线的衰减,λ为波长,BWWLAN和BWGPS分别为WLAN和GPS的信号带宽,假定d为1米,PTX 等于17dBm,由此计算得到LNA输入端接收到的WLAN信号强度约为-60dBm;另一强干扰源为GSM-1800,经过滤波器的强度为 -19dBm,从而得到互调项的强度如下式[6]:
 (9)
(9)
式(9)中,PWLAN和PGSM分别为LNA输入端看到的WLAN和GSM信号强度,Cfactor为考虑到采用IIP3来表征互调的校准因子。将互调项代入式(7),并且考虑到宽带扩频信号干扰时的校准因子Q等于1.5,可以得到TTFF随IIP3的变化曲线如图6所示。LNA在IIP3分别等于 -5dBm和+5dBm时,首次定位时间最大相差15倍,由72秒减小至4.7秒。现在的移动设中,WLAN已经是标准配置,AW5005则让内置GPS 在WLAN的干扰信号下随时随地放心工作。

图6 互调干扰下系统TTFF随LNA 三阶交调点的变化曲线
4 AW5005同国内外同类产品的比较
通过上文,我们了解了LNA的噪声系数NF和线性度指标P1dB/IIP3对GPS系统的性能影响至关重要。下面我们通过与国内外同类竞争产品的比较来让读者更深刻的认识AW5005的优势。无论是噪声系数NF,还是线性度指标P1dB/IIP3,AW5005都达到了业界领先水平,大大简化了复杂射频环境下内置GPS系统的设计要求。
这里值得一提的是,设计LNA模块时必须考虑功率增益PG和IIP3的折中,高功率增益往往线性度较差。现实中,通常采用OIP3指标来衡量模块的线性度指标更为准确和可靠。图7中列举了国内外同类产品的OIP3指标,AW5005依然在同类型产品中领先。

图7 同类型LNA产品性能参数对比
为了衡量LNA的综合性能,文献[8]给出了优值计算公式来进行更为公平的比较。该公式如下所示:

(10)
由此得到的各个相关产品和AW5005的优值如图8所示。AW5005以22.6dB的最高分,比同类产品高2~10dB不等。由此可见,AW5005将是手机内置GPS系统设计者和供应商们的首选。

图8 同类型LNA产品综合优值对比
5 线性度传导测试案例
为了体现线性度在整体测试环境中的优势,我们搭建了如图9所示的传导测试平台,用来测试在干扰环境下的GPS整机性能。如图所示,该测试平台包括两个不同频率的干扰源,可以用来模拟产生三阶交调的干扰信号(如1.713GHz的UMTS频段的和1.851GHz的GSM1800频段),以及二阶交调的干扰信号(如824M的GSM频段和2.4GHz的ISM频段等

图9 干扰环境下的整机传导测试
GPS信号源用来产生模拟GPS系统的8颗卫星信号,随后经过一个高线性度的宽带Diplexer功率合成输出到样机的天线馈点处。GPS系统采用国内某厂商试产样机,对比芯片采用国内M公司的主打产品(简称为M),干扰信号源频率分别为1713MHz的UMTS频段和1851的GSM1800频段,当 GPS信号功率强度分别为-128dBm(左图)和-143dBm(右图)时不同干扰功率下的信噪比对比。

图10 干扰环境下AW5005同同类型芯片M的整机传导测试
从图10可以得出结论,当GPS信号功率为-128dBm时,AW5005的抗干扰能力明显强于M:当等效干扰信号强度为-82dBm时,采用 AW5005的整机要比采用M芯片的整机载噪比高14dB,随后M芯片的整机无法有效跟踪GPS信号,进入失效状态,而采用AW5005的整机仍然能够准确定位,知道有效干扰信号强度为-69dBm时才进入失效状态。相比M芯片,AW5005的抗干扰能力高达13dB。同理当GPS信号为-143dBm 时,AW5005的抗干扰能力为14dB,最高载噪比优势为4dB。图10中的下图分别为不同GPS信号功率时AW5005的载噪比优势。
由于干扰信号的的频率和来源较为复杂,其对整机GPS传导性能的影响此处不再赘述,上述情况仅为一典型案例,其它情形可基于干扰环境下的整机传导测试平台进行相关测试。由上所述,AW5005的抗干扰能力在国内外同类产品中具有较为明显的优势,尤其适合用于基带和射频干扰信号较多的智能机解决方案中。
6 结论
随着便携式设备的爆发性成长,手机环境中的射频干扰日益嘈杂,内置的GPS系统面临着越来越严峻的挑战。GPS低噪声放大器产品AW5005,有效的解决了上述问题。与传统的GPS LNA方案相比,AW5005提供了更低的噪声系数、更好的线性度、更快的交货时间和更有竞争力的性能。










 工商网监
工商网监
评论