1.8 亿美元,出货量约 2 万台,中国厂商及消费级应用成为市场主导力量。 四足机器人的主要技术应用 四足机器人是模仿动物四肢运动模式的仿生机器人,通过四条腿的协调运动实现移动,具备出色的地形适应性与灵活性。在运动逻辑上,四足机器人多模仿狗
2025-07-03 00:57:00 8471
8471 分会三、展会介绍为全面贯彻党的十九大精神,促进新一代人工智能技术的产业化与集成应用,推进“中国制造2025”国家发展战略,打造东北地区机器人研发生产领域集展示、交流和贸易于一体的国际化、前沿化、市场化
2019-02-21 13:20:36
2019中国(沈阳)国际机器人展 邀请函 为全面贯彻党的十九大精神,促进新一代人工智能技术的产业化与集成应用,推进“中国制造2025”国家发展战略,打造东北地区机器人研发生产领域集展示、交流和贸易
2019-01-07 16:19:40
正在不断缩小。相比于四大企业,中国的机器人及智能装备产业与国际的同行还有不小的差距。主要体现在多个方面。第一,高素质的专业技术人才严重短缺,自主创新能力严重不足,尤其是原始创新薄弱;第二,智能化水平
2014-04-09 17:13:31
底,我国机器人企业已达530余家,其中包括60余家上市公司,而与机器人相关的企业数量甚至超过了4000家。中国机器人产业的发展似乎已偏离正常轨道,这或将是一个新的产业泡沫。 市场被四大家族垄断,关键
2015-12-29 15:56:47
`这是创客集结号的作品四足机器人身体和四足都是通过3D打印技术打印出来的,通过自己安装连接上超声波传感器,制作成功的四足机器人完全就很了。`
2018-09-29 09:55:09
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
2021-09-15 06:54:01
本帖最后由 红尘。破 于 2016-8-19 14:59 编辑
今天整理资料时发现了一年前做的四足仿生机器人,当时买了一个四足仿生机器人的骨架,画了个板子,写了个测试代码,能完成简单的行走,后面加了避障、显示功能啥的,不过视频资料没了,只有简单行走的视频,优酷链接在下面评论
2016-08-19 14:59:33
本帖最后由 eehome 于 2013-1-5 10:08 编辑
四足步行机器人的弯道行走
2012-08-12 09:53:57
四足爬虫机器人由Basicduino控制器控制。四个连续旋转舵机和一字舵盘构成它的四条腿。两个绿色发光二极管形成爬虫的眼睛。再加上两条钢丝组成其一对触须,一个喇叭让它能发出“蛐蛐”的叫声。它是一个会叫,会跳舞,眼睛会发光的“蛐蛐”机器人。当它的触须碰到你,它还会自动避开哦!是不是很有意思?
2016-03-28 16:28:31
分享一个四足蜘蛛机器人- 开题进入大学以来,学习单片机已经很长时间了。之前都是在开发板上学习各种外设,做各种实验,一直也都没正经的做过什么项目。刚好临近毕业,需要做毕业设计,我感觉这是一个很好的机会
2021-12-06 06:04:56
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
现场首发其第三代泊车机器人,新型滚筒式泊车agv机器人——getamodelw;无线载重型夹臂式泊车机器人——pincer及柔性传送式泊车机器人——belt。其中新型滚筒式泊车agv机器人更将以怡丰首字母“y”为运动轨迹,演绎强大的地面适应能力及360°的全方位运动能力。
2018-11-28 16:20:46
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
波士顿动力创始人Marc Raibert 1986年的书,足式(腿式)机器人开山之作,研究集中在平衡和动态控制的核心问题上
2017-12-11 10:22:52
去年 1 月份,瑞士公司 ANYbotics 放出来一款灵活的四足机器人——ANYmal,它可以对抗各种恶劣的现实环境,适用于在危险的工业场景中执行任务。在最近的世界机器人大会上,ANYbotics
2021-12-31 06:28:53
本帖最后由 colorsky 于 2016-4-21 14:05 编辑
大家好,我是ColorSky。这是我的双足机器人的开源项目。先发出视频给大家看看,后面陆续会把技术资料上传。机器人鞠躬动作机器人舞蹈1视频机器人跳机器舞视频
2016-04-21 10:51:28
`在本项目中,我将从头开始打造一个能够使用蓝牙进行控制的四足乌龟机器人。该机器人拥有两个自由度,采用的是爬行的方式进行运动,所以在不平坦的地面可能不能正常工作。第一步:3D打印组件本机器人的部分
2015-12-11 17:26:04
描述“迈尔斯”开源四足蜘蛛机器人它使用 8 个 SG90 / MG90 伺服电机 作为腿部的执行器,由一个定制的 PCB 组成,用于为伺服系统供电和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30:29
求大神指导怎么做多足机器人的行走的动画演示!!!
2017-04-23 11:36:56
` NASA正在进行的项目为开发一组VolcanoBot系列火山机器人,用来替代科学家在火山口内部岩浆裂隙等危险环境的考察测绘工作。NASA科学家表 示,我们对火山爆发其实并不了解,我们的模型只能
2015-01-13 16:45:15
的提高。OFweek行业研究中心高级分析师潘伟认为,预计未来3-5年内,伴随人工智能机器人的技术突破、商业模式的创新探索,以及市场培育起来之后,服务机器人有望成为继电脑、手机之后的新一代智能终端,成为连接虚拟世界与现实世界的重要载体。
2016-01-26 14:11:35
用labview如何编写六足机器人三足步态的程序?主要的依据和原理是什么呢?求指教!
2016-08-04 19:21:05
六足爬行机器人毕业时的作品,当时还处于入门状态,c程序写的比较菜(程序写的比较乱,仅作参考),一直想把这个六足机器人作品优化一下,可惜,一直在忙,现借助电路城这个平台开源给大家,希望大家能继续
2014-03-27 18:51:05
传感器。四足机器人重2.2kg,有8个自由度,四条腿上都搭配了足底传感器。其他零件由3D打印和现成的零件构成,可以做出重量轻且低成本的机器人,这也使得其他研究团队可以快速开发和复制此项目。本文系统地描述了
2021-09-13 06:33:53
申请理由:关于六足机器人,基本上是用18个舵机一起使用来驱动六足完成相应的动作组,而一般的89C52以及STC12系列的单片机只能让六足机器人做简单的动作,无法完成相应的创新。所以能有一块STM32
2015-11-25 15:35:26
数据。项目描述:六足爬行机器人相比于其他类型的机器人,在运动的稳定性、适应性、操控性上面具有较大的优势,可以较为轻易的越过比较大的障碍物,例如阶梯、鸿沟等,具有良好的越障能力,机器人本身也相对有较多
2015-08-09 17:12:20
申请理由:我研究所正探讨研究一套排爆机器人方案,以解决公共场所突发的安防问题。项目描述:舵机组支撑,采用四足并履带方式运动,结合先进的互联网接入系统,多路摄像头组,实时反馈监控并配合人实现危险排除。
2015-07-29 20:50:42
申请理由:项目描述: 现有一个六足机器人平台,但是没有心仪的开发板来控制,之前有用过STM32F4的单片机。F412ZG的定时器丰富,IO口数量充足,具有各类通信外设,十分适合做六足机器人的控制开发
2016-11-14 18:54:33
申请理由:我正在做这样一个机器人,遇到了很多问题,非常想学习一下这款板子!我相信利用它能帮我解决难题!项目描述:可利用四足机械结构仿生行进,也可利用车轮进行行进,集四足机器人越障能力强和轮式机器人行动迅速的特点于一身,具有良好的复杂环境地形适应性,可用于灾区侦查、救援。
2015-06-25 19:38:19
申请理由:手头有个毕业设计是采用stm32的。。想试着换换主控。来作为六足机器人的主控板。。32虽然够用。但是毕竟烂大街。。正好试试学着用用其它款单片机。项目描述:使用申请的开发板做主控。用
2015-07-17 16:53:26
数据。项目描述:六足爬行机器人相比于其他类型的机器人,在运动的稳定性、适应性、操控性上面具有较大的优势,可以较为轻易的越过比较大的障碍物,例如阶梯、鸿沟等,具有良好的越障能力,机器人本身也相对有较多
2015-08-07 22:30:34
数据。项目描述:六足爬行机器人相比于其他类型的机器人,在运动的稳定性、适应性、操控性上面具有较大的优势,可以较为轻易的越过比较大的障碍物,例如阶梯、鸿沟等,具有良好的越障能力,机器人本身也相对有较多
2015-09-09 17:03:59
品牌影响力等各方面都存在非常大的差距,大多数国内企业还停留在仿制和拼装的阶段,真正具备自主研发能力的企业不多、企业核心竞争力不强。 中国机器人企业数量(家) 资料来源:OFweek行业研究中心
2015-12-29 10:54:26
学科于一体。课题旨在设计一种结构简单的小型双足步行机器人,在此基础上对双足步行机器人的步行机理、步行参数及运动控制进行研究,为设计自主智能双足步行机器人打下基础。论文结合人类下肢关节的结构特点,并对其
2014-01-02 14:31:52
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
要想机器人有智能,必先赋予其感知能力。感知计算,特别是视觉以及深度学习,通常计算量比较大,对性能要求高。但是机器人受电池容量限制,可分配给计算的能源比较低。
2019-10-10 06:39:48
早使用机器人一词,剧中机器人“Robot”这个词的本意是苦力,即剧作家笔下的一个具有人的外表,特征和功能的机器,是一种人造的劳力。它是最早的工业机器人设想。20世纪40年代中后期,机器人的研究与发明得到
2015-01-19 10:58:38
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足机器人的行走步态设计、舵机的梯形速度控制、多路舵机的协调控制
2016-03-24 16:17:53
全向轮机器人是如何进行直线运动的?
2021-10-29 07:09:14
、特种机器人成为其重点发展的三个领域。围绕着“世界机器人创新基地-彻底巩固机器人产业的培育能力”,“世界第一的机器人应用社会-机器人随处可见”以及“迈向领先世界的机器人新时代”三大机器人核心战略,日本制订
2016-01-28 15:21:21
求大神上传一个六足机器人的骨架图纸
2014-07-28 10:32:54
谁会做六足机器人,求资料??大神们
2013-06-06 00:01:39
可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动
2020-04-27 08:04:05
我在 Arduino Nano 的帮助下制作了一个四足机器人。但我经常遇到 HC-05 蓝牙模块的问题。所以现在我正在考虑用 ESP8266 替换 Arduino。谁能帮我这个?
2023-06-02 08:12:06
第三章、双足机器人的硬件结构与框图一、双足机器人的硬件框图图1. 双足机器人结构框图
2013-11-25 11:30:18
目前,全方位移动机器人由于具有出色的灵活性,已经成为RoboCup中型组足球机器人比赛中最理想的选择。而机器人的运动控制一直以来都是直接影响机器人性能的主要因素,也是移动机器人研究的热点之一。本文
2019-10-22 07:35:19
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
如何完整的组装四足机器人?
2021-09-24 07:00:54
CyberDog是一款工程探索版的仿生四足机器人。其12个自由度的四足移动平台,具有优越的平衡能力与环境适应能力,对于无规则地形有很好的环境适应性。搭载视觉感知相机,使CyberDog具备优异的人
2021-09-14 14:05:56
大部分运动能力的替代品。我不是说我能重现那些机器人巨头的精确动作。我只是将价格从数百万美元降低到数百美元。我不期望把它送到战场或其他具有挑战性的环境中。我只是想让这个调皮的伙伴融入一个干净、智能但过于
2024-12-16 11:44:32
怎么实现六足机器人的设计?
2021-11-22 08:02:22
基于STC15/LPC845的四足机器人是由哪些部分组成的?怎样去制作一款基于STC15/LPC845的四足机器人?
2021-09-26 08:46:16
Ⅳ. 问题讨论1) 设计选择:设计一个低重量的四足机器人,同时保持有效的阻抗和力控制能力需要我们将这些功能相互协调地设计。我们设计一个新型足式机器人,使用无刷直流电机进行驱动,因为它们是一种高性能
2021-09-15 06:04:41
目前的“临界期”,跨上一个新的台阶,进入快速发展阶段。在未来,为应对国际挑战,我国应从机器人本体优化设计技术、新一代智能控制机器人技术、关键机器人单元部件制造技术等方面对新一代工业机器人的技术进行研究
2015-12-17 14:53:56
,例如火警,地震,房子遭入侵的警报,消防预警等等.4.监控机器人要有行动能力,可在不同房间或楼层走动.5.单价要低.不能比计算机还贵.6.低阶的机器人只需上述的功能,高阶的机器人则需具备感知分析能力,必需要能分析不同影像数据的变化. 有想法欢迎讨论!
2019-10-30 02:25:39
`业余,想想做一做六足机器人。但是苦于无大致图纸,卡在建模的问题上。求六足机器人的图纸,有清晰的尺寸就行(主要是腿)。`
2019-03-26 18:43:17
求契贝谢夫四足机器人的各部件尺寸
2013-11-27 15:42:51
本人新手,最近在准备制作一个六足机器人,如果利用舵机控制器+遥控手柄套件的话,可以很容易就实现简单的功能。为了能让六足机器人实现更加复杂的功能,我想利用arduino+树莓派+舵机控制器的方式。这样
2015-11-10 15:33:17
六足虫虫机器人概述:新版虫虫用3个微型舵机的协调摆动来行走,通过红外测距来感知环境,还能够感知周围的光线亮度。另外,新版虫虫的中枢依旧是一颗强大的Beetle控制器和扩展板,而且是利用简单易用
2016-08-02 14:43:18
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
机器人激光焊接机:高精度自动化焊接的未来1. 概述机器人激光焊接机是一种集成了工业机器人和激光焊接技术的先进自动化设备,通过高能量密度的激光束实现快速、精准的焊接。该系统结合了机器人的灵活运动能力
2025-03-28 14:04:12
四足机器人测试视频下载
2013-09-10 10:36:41 130
130 近日,麻省理工学院推出了最新一代的猎豹机器人。这台被称为机器人里的法拉利的四足机器人已经经历了两次换代,在这之前,它奔跑起来的最大时速可达48km/h,同时还可以自主跳跃,避开障碍物,就像一个敏捷
2017-09-19 14:32:1230 新型仿生六足机器人步行足运动学分析与研究
2017-10-17 14:22:3125 对于那些研发四足运动机器人的专家而言,往往需要耗费大量时间来制定机器人步态控制策略,这样才能确保它们行走时更加稳定、并适应各种不同环境。一般来说,科学家会使用先进的控制器来让机器人更有效地完成工作任务,比如向机器人指派给定任务,或是根据特定地形来选择适当的步态。
2017-11-03 13:35:302531 态运动中四肢各关节的运动规律,设计一款四足机器人。该机器人足端具有转化足端与地面刚性接触为柔性接触的机构。根据正运动学和逆运动学理论分析模型足端工作空间。将仿真获得的受力曲线与实际受力曲线进行对比,结果表
2018-02-08 16:07:112 近日,浙江大学的机器人研发团队发布了“绝影”四足机器人。该机器人身长1米,四足站立时60厘米高,重70千克,载重可达到20公斤,行走速度为每小时6公里,续航时间2小时。目前,“绝影”四足机器人已经
2018-04-30 14:52:002668 利用ADAMS软件虚拟样机技术,设计了液压驱动的四足仿生机器人单腿机械结构。通过分析四足哺乳类动物身体结构及运动特性,设计了仿生机器人的机械机构,确定了机器人腿部自由度配置,建立了仿真模型。根据动物
2018-03-01 11:41:123 双足步行机器人---直立行走,其有着良好的自由度、动作灵活、自如、稳定。双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。
2018-08-10 09:26:0317956 四足爬行机器人,它涉及一种微小型爬行机器人,一种具有很高的运动稳定性和对环境很好的适应性的可以代替人类进行各种极限作业的移动机器人
2019-05-22 06:05:005436 最近四足机器人开始频繁的进入大众视野,相比传统的轮式、履带式以及双足机器人,四足机器人在面对复杂地形时,拥有更高的机动性、更强的稳定性,在军事任务、抢险救灾、地形勘探等多领域,展示出更加强大的能力。
2019-06-07 11:32:004741 今年,Robocon2019 赛题中,其中一部分要求是制作一个四足机器人,需要实现直线,转弯,越障,过绳,上坡等功能。哈工大机器人对的队员们针对赛题,在机械控制和硬件上开展了 8 个多月的研发工作。最终完成了一个可以实现跳跃和高速奔跑的通用四足机器人 “踏浪”。
2019-07-18 09:51:495201 控制系统作为四足仿生机器人最重要也是最基础的组成部分,其性能的好坏直接对四足仿生机器人运动控制效果产生巨大的影响。在机器人研究的早期,控制系统一般采用单级处理器的集中控制模式,利用一台运算速度快
2019-09-27 08:00:000 兼具高速度、 高机动和高适应性已成为四足机器人发展的必然趋势, 仿生关节作为重要的基础运动部件, 对四足机器人的运动学和动力学研究具有重要的作用。 从气动柔性的仿生关节、液压减震的仿生关节、 串联
2019-10-09 08:00:008 和拟人性,其行走控制成为当今研究的热点。步行运动模式与运动控制是影响双足步行机器人技术进步的重要问题,也是双足步行机器人成功而有效地实现稳定步行的理论基础和技术关键。
2020-04-01 17:10:0020 近日,轻型机器人企业珞石机器人正式对外宣布,已获得由著名风险投资基金襄禾资本投资的1亿元C1轮融资。据悉,本轮融资将主要用于加速机器人创新应用的技术研发,促进新一代智能柔性协作机器人xMate系列产品开发,推进其在医疗、服务、柔性生产等场景的落地,加速推进珞石成为全球轻型机器人的市场领导者。
2020-09-16 15:06:153281 9月15日,第22届中国国际工业博览会大奖(CIIF大奖)揭晓,10项代表国际制造业领先水准的技术产品获奖。节卡机器人研发的新一代All-in-one共融系列协作机器人荣登榜单,系机器人行业唯一获奖
2020-09-21 14:43:392184 腿+轮式动力!瑞士四足机器人ANYmal展示最佳混合步态,运动更灵活,机器人,四足机器人,步态,轮子,车轮
2021-02-20 13:44:352877 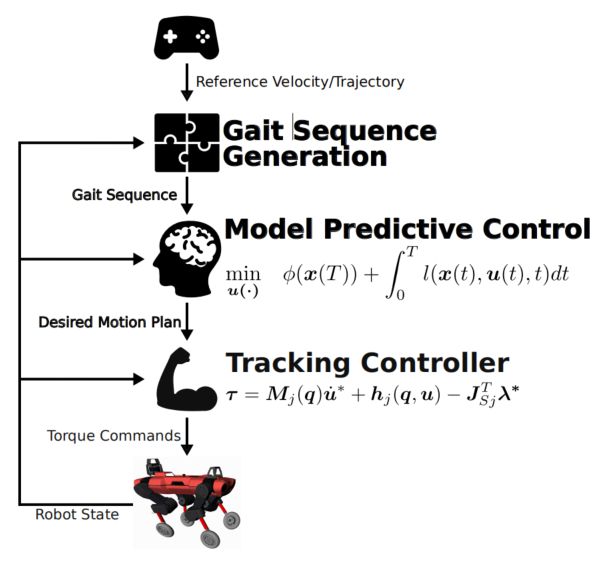
的哪些商业价值? 四足机器人背后的价值 我们知道,仿生机器人无论是双足还是四足,它们被设定的结构与功能未来主要满足的应用场景分为两个大类。一类是面向C端用户,提供陪伴+服务型机器人,主要是借由四足机器人具有的人机交互能力。另一类是面向B端客
2022-01-28 09:10:41871 在国内外众多科幻电影和小说中,经常出现引人注目的机器人,其多变的能力和几乎在各种场景中的全方位应用让人着迷。在现实世界中,我们经常可以看到这样的视频。机器狗在马路上行走,突然被人迎来,或者一些视频
2022-02-14 09:02:543763 2021年,小米发布了备受关注的四足机器人铁蛋,正式加入四足机器人烧钱大军。除了小米,腾讯、华为、oppo等多家大厂都在纷纷加入这一新兴赛道。这些资本在 四足机器人 背后看到了什么商业价值?
2022-02-14 09:22:334791 要说当下时尚潮人的“标准”是什么,四足机器人肯定是有名字的,国内也出现了“四足机器人”的热潮。甚至腾讯、小米等也推出了自己的机器狗。此外,一些新兴的创新公司也加入进来,如蔚蓝科技,其第五代
2022-02-25 17:21:444681 四足机器人是机器人行业复杂度最高、难度最大的机器人类型之一,其运动灵活性高、复杂地形适应能力强,最早期的研究者主要将其应用在军事领域。近年来,随着新材料、机器人智能控制、感知导航等技术不断突破,行业对四足机器人的研究逐渐深入。四足机器人逐步从实验室走向现实大众的生活,其商业化进程也在不断加速。
2022-03-25 10:29:393389 四足机器人是机器人行业复杂度最高、难度最大的机器人类型之一,其运动灵活性高、复杂地形适应能力强,最早期的研究者主要将其应用在军事领域。近年来,随着新材料、机器人智能控制、感知导航等技术不断突破,行业对四足机器人的研究逐渐深入。四足机器人逐步从实验室走向现实大众的生活,其商业化进程也在不断加速。
2022-03-28 10:44:251563 01普渡科技首推四足配送机器人D1 四足机器人是机器人行业复杂度最高、难度最大的机器人类型之一,其运动灵活性高、复杂地形适应能力强,最早期的研究者主要将其应用在军事领域。近年来,随着新材料、机器人
2022-03-28 12:27:181803 模式,以对应不同的需求。 全球范围下的巨头入场,可见四足机器人这一新兴赛道依然热度不减。 遍地开花的四足机器人 目前全球知名四足机器人玩家有波士顿动力、麻省理工学院仿生实验室、LS3等,尽管民间一直传言波士顿动力有开源技
2022-04-06 15:51:472585 一直以来,波士顿动力是机器人领域的搞事情先驱。四足机器狗能跳舞、两足机器人能跑酷,波士顿动力每有新发布,都让公众眼前一亮。不过尖端研发很丰满、商业落地很骨感,波士顿动力再怎么会搞事情,也面临成本高
2022-04-06 18:13:112819 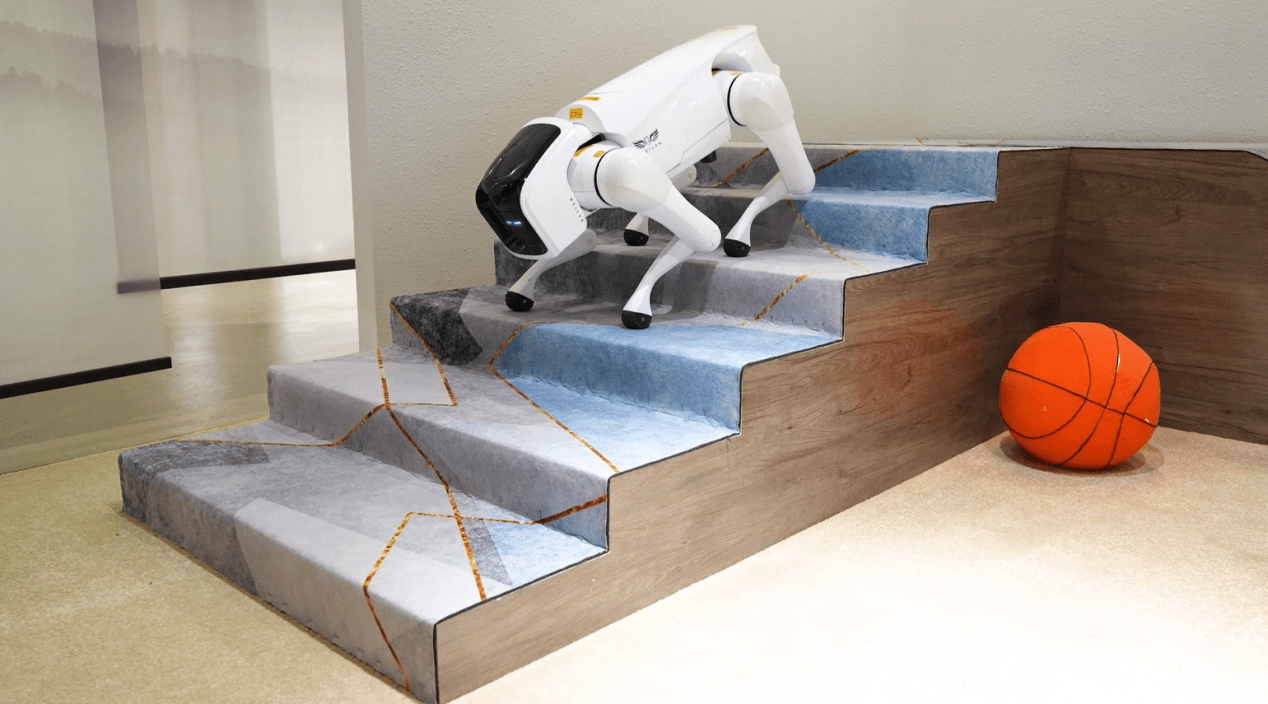
All in派是指持续的专注,也就是指最早带着技术和资本在布局四足机器人行业的企业们,也正是“四足机器人池”最开始的鲶鱼。
2022-11-10 15:21:42863 当四足机器人执行上楼任务时,向后的肘部设计为腿部提供了更大的无碰撞工作空间
2023-01-06 11:57:162194 四驱消防机器人的出现解决了许多传统灭火方法所面临的困难和限制。首先,四驱消防机器人拥有出色的机动能力,能够轻松应对各种复杂的地形和环境。
2023-06-14 09:40:101374 0、步态规划 四足机器人控制当中,步态是至关重要的一项。我们可以简单理解成四足机器人运动过程中各腿的状态,在这套设计方案中,我们对步态的规划主要分成两大主要部分,即接触状态和周期函数。而步态规划
2023-11-16 17:17:551596 
由于涉及复杂的动力学,为四足机器人制定有效的运动策略是机器人领域面临的重大挑战。在现实世界中训练四足机器人上下楼梯可能会损坏设备和环境,因此,在学习过程中,仿真器在确保安全和消除时间限制方面都发挥着关键作用。
2024-09-06 14:48:422494 
四足机器人凭借其独特的地面接触方式和对复杂地形的出色适应能力,已成为自动化与机器人工程技术研究的焦点。近年来,在结构设计、运动规划和平衡控制等关键方面,四足机器人已取得重要进展。然而,如何进一
2025-01-20 10:15:284070 
”具身机器人平台的企业。 此前越疆机器人发布的六足仿生机器狗是集“认知、动作、机动”三大核心能力于一体的创新产品,而且六足架构既具备优于四足结构的稳定性和负载能力。 越疆六足仿生机器狗的五大优势: 一是高稳定性。其拥有
2025-07-09 15:03:391938
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论