并联机器人的体积相对较小,用于食品、药品包装以及电子器件装配。并联机器人具有出色的精度和高速性能,使其非常适合这些应用。这类机器人的此种并联运动学特性使得快速、准确地运动成为可能,也使其拥有了与铰接
2023-05-24 18:36:51 9310
9310 
3D图形控件设置并联机器人(如Delta机构)各两件间的对象关系,怎么设置啊有没有人知道啊?目前见到的都是串联型机构。
2020-03-28 21:42:43
随着机器人性能的提升和价格的下降,以“自动化设备+工业机器人操作”取代传统的“自动化设备+人工操作”的生产模式将成为PCB行业转型发展的趋势。
2019-10-10 06:54:02
及以太网的联网功能。可用于机器人控制器之间和机器人控制器同上位机的通讯,便于对机器人生产线进行监控、诊断和管理。 工业机器人主要用于汽车、电子行业,这两个行业占比达到59%,其中汽车行业机器人的密度已经成为衡量一个国家智能化水平的重要指标。`
2018-11-23 10:40:38
`▼并联机器人迅速将糖豆放入瓶里 仔细观看我们可以发现,相同颜色的糖豆放在一个瓶里 并联机器人这类设备主要用于精密紧凑的应用场合,竞争点集中在速度、重复定位精度和动态性能等方面。 并联机器人快速拾取枕包牛奶,放入指定位置 并联机器人快速准确拾取物体`
2016-09-14 11:37:02
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(码垛机器人)其他类型机械臂:圆柱形、球坐标符号表示机器
2021-09-08 07:44:15
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
集中于串联式的工业机器人的理论与工程应用。虽然串联机器人具有诸多优点,但同时也有些问题函待解决。本文介绍了一种新型的串并联喷涂机器人的结构设计,并对其运动学、误差建模、误差补偿和轨迹规划进行了分析
2017-07-13 16:03:16
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
2021-05-12 06:38:22
,节约原材料消耗以及降低生产成本,有着十分重要的意义,正在日益改变着人类的生产和生活方式。工业机器人已经广泛应用于汽车及汽车零部件制造业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、物流等诸多
2015-09-02 14:03:18
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度
2019-06-02 08:00:00
介绍DELTA并联机器人的基础知识与系统设计原理,并结合ABB和FANUC机器人,介绍了工业生产中的常用并联机器人机型与编程操作。本书依据学习者的认知规律,侧重工业机器人的技术要点,通过相关典型实例讲解
2018-10-29 17:03:22
现代运动模拟器对响应快速性、跟踪准确性等仿真运动特性提出了更高要求,使得并联机器人机构的运动控制更为复杂。以某型潜艇操纵模拟器为例,其控制软件采用模块化设
2009-06-01 10:53:32 23
23 本文针对一种以步进电机驱动的少自由度并联机器人,采用带分离干扰补偿器的离散变结构控制器。仿真结果表明该算法解决了传统变结构控制在数字实现时的抖振问题,且系统抗
2010-03-03 14:55:4524 根据平面微小并联机器人系统的功能设计要求,在机器人系统的机构、控制分析的基础上,于设计阶段引入正逆向求解,适当的限定条件保证了坐标变换和运动轨迹规划的唯一性,
2010-03-03 15:13:3513 基于LabVIEW和PXI平台设计的6-DOF并联机器人控制系统
应用成熟的NI系列产品快速构建一套功能完善、性能优越、人机界面友好的开放式多自由度并联机
2010-05-13 10:37:512563 
以6-PPPS六自由度并联机器人为对象,以PXI-1042内嵌PXI-8186控制器为核心,采用PXI-7356多轴运动控制卡和UMI-7774接口板驱动6个伺服电机,采用多轴控制卡的配套软件和LabVIEW 8.0实现电机完全
2011-04-02 17:32:2394 研究了 并联机器人 冗余驱动控制方法首先将系统动力学方程投影到位形空间并采用计算力矩方法设计期望的控制输入然后构造位形空间与驱动力空间之间的映射以求解冗余输入优化问
2011-07-06 17:57:4055 分析了3-RPR并联机器人工作空间的影响因素,以支腿长度约束、支腿与动平台交汇条件以及支腿与动平台夹角限制为约束条件,并采用快速极坐标搜索法确定了3-RPR并联机器人的工作空间。
2012-02-08 15:49:3637 基于OpenMP的Stewart并联机器人控制系统_李昂
2017-03-19 19:12:424 并联驱动机器人比传统的串联机器人具有较高的刚度和精度,较高的承载与强度之比,而且驱动方便。但是并联机构缺乏串联机构工作空间相对比较大的特点,其工作空间往往比较小,以至于不适合工作空间较大的工业机器人
2017-10-14 12:08:064 本论文以螺旋理论为基础,提出一种系统的结构综合方法。根据各条支链对运动平台所提供的反螺旋约束的线性关系,研究了构成五自由度并联机器人机构的各条支链所有可能的运动副组合以及它们的空间几何条件。利用这一方法,设计出一组结构对称的五自由度并联机器人。
2017-10-17 14:51:586 通过与传统的串联机器人的比较,分析了并联机器人的特点。介绍了并联机器人在运动模拟器、并联机床。工业机器人、微动机构、医用机器人、操作器方面的应用,指出了并联机器人研究面临的几个主要问题。 1并联机器人
2017-10-17 15:22:3610 并联机器人相对于目前广泛应用的串联机器人来讲,具有刚度强、精度高、自重负荷比小、速度高等显著的优点;但也有其不足之处,如同样的结构尺寸,并联机器人的工作空间小,存在杆件空间的干涉、奇异位置等
2017-10-21 10:16:5611 三维移动和两维转动的5 个自由度。 少自由度并联机器人机构其动平台的独立输出运动数小于6。近十多年来,该类机构成为研究的一个热点。这是由于少自由度并联机器人结构简单、造价低,具有良好的应用前最。在许多场合,非期望
2017-10-23 16:24:5015 采用分散控制策略和非线性 P ID 控制算法, 实现 6 自由度并联机器人的高精度轨迹跟踪控制。该非线性 P ID 控制器由两个二阶非线性微分跟踪器提供高质量的微分信号, 并采用非线性组合形成控制
2017-11-08 16:33:4613 机器人技术发展到现在,虽然已经得到了突飞猛进的进步,但是对于并联机器人运动学正解的封闭解问题依然是机器人技术的瓶颈,在实际应用中采用的广义几何法和方程组的数值解法等,不但推导过程非常复杂,而且在求解
2017-12-01 16:08:452 并联机器人位置的模糊PID控制性能进行仿真。通过研究得出,从最低升到最高处的阶跃响应的峰值响应时间约为0.25 s,稳态误差小于0.01 m,其控制器比例系数在衰减后上升,最后稳定在2.68附近,积分参数起时为0,在0.05 s时迅速上升,最后稳定在0.08附近。
2018-03-07 16:48:174 分析,证明控制系统渐进稳定;其次,借助MATLAB软件,对该控制方法进行动态仿真,仿真结果表明非线性同步控制方法具有较高的跟踪精度和控制精度,以及优良的同步控制性能;借助二自由度冗余驱动并联机器人实验台,对并联机器人
2018-04-24 15:47:080 5月份勃肯特自主研发串并混联5轴、前几天智慧工厂的投产仪式的现场还在眼前,近日,勃肯特又正式对外宣布直驱并联机器人以及控制器的研发工作,性能实验均已达标,不日将正式推向市场。
2018-07-17 16:44:003809 并联机器人作为工业领域一种全新结构的机器人,诞生较晚,市场规模较小。但外资加紧对中国市场布局,国内企业竞争激烈。
2018-07-24 14:59:564788 近日,勃肯特机器人技术有限公司成功完成了直驱并联机器人的研发工作,性能实验均已达标,并将正式推向市场,这是继今年5月成功上市自有串并混联5轴的研发与投产后的又一举措。
2018-07-28 09:51:424636 
的需求不断上升的大趋势带动下,电子行业的工业机器人服务数量几乎与汽车行业齐头并进。而作为在整个工业机器人大家庭中一个分支的并联机器人,在生产制造中却越来越扮演着举足轻重的角色。
2018-08-07 17:35:332605 目前,国际国内大部分并联机器人市场基本上由发那科、爱德普、ABB等企业占据,国产化率基本稳定在25%左右。在外资品牌加快对中国并联机器人市场布局的同时,国产品牌也不甘示弱,凭借性价比的优势和新的应用领域的开拓,国产并联机器人或将率先和外资品牌展开较量。
2018-08-29 14:10:00976 勃肯特董事长王岳超认为,刚开始并联机器人市场还没有起来,所以前期投入资金比较少,很多企业并没有看到这个市场进一步的发展空间就盲目的进来了。但是这些企业并没有在技术上加大投入,做出来的产品品质不好,速度不够快,不能被市场认可。再加上销售数量少,投入产出比差,因此很多企业陆陆续续选择了离开。
2018-08-17 14:41:174618 说到工业机器人,一般人想到的其实是那种单独的机械臂,围绕着杠杆和关节进行旋转作业。这种机器人被称为串联机器人。辰星的阿童木机器人,则是工业机器人家族的另一极,并联机器人。
2018-08-22 15:30:122787 积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度
2018-10-07 10:57:006863 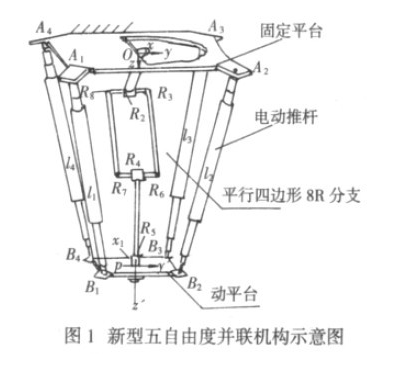
在工业机器人中,并联机器人一直凭借其高速度、高精度的优势在工业生产中广泛应用。作为国内知名工业机器人企业,勃肯特除原有的七大机器人系列外,又根据现阶段制造型企业的发展困境,帮助制造企业快速提升产能
2018-10-08 17:05:143637 1992年,我国第一台六自由度并联机器人样机研制成功,2012年,随着ABB专利技术解禁,企业开始批量进入,并联机器人商业化速度加快,6年过去,如今的并联机器人市场又如何?
2018-10-25 08:42:255184 
1992年,我国第一台六自由度并联机器人样机研制成功,2012年,随着ABB专利技术解禁,企业开始批量进入,并联机器人商业化速度加快,6年过去,如今的并联机器人市场又如何?
2018-11-03 11:08:325894 在新松机器人智能制造产业园的车间里,新松为双汇股份研发生产的并联机器人摆肠机系统正在紧张的出厂调试。
2018-11-30 14:29:023855 作为并联机器人继续发展与创新的一个重要方面,拖动示教的应用将为并联机器人调试技术趋向快速、简便的方向发展。秉承不断创新突破自我的勃肯特,在11月正式通过拖动示教在并联机器人上的内部测试,实现该项技术在并联机器人应用的零突破。
2018-12-07 17:14:081705 行业,物流运输设备行业等多个行业,用于实现快速抓取,提高工作效率。随着先进制造技术的发展,并联机器人将有非常好的发展前景。近几年国内各机器人制造商及设备制造企业纷纷开始研发Delta并联机器人。但是
2018-12-22 14:05:551321 并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
2019-01-07 16:17:1011657 并联机器人,是一种通过至少两个独立运动链连接动、静平台,具有多个自由度且采用并联方式驱动的闭环机构。该种机器人具有速度快、柔性强、刚度高、质量轻等优势,在机床、食品、医药、电子、物流等领域具有广泛应用,其与串联机器人共同组成了工业机器人的完整形态。
2019-01-24 09:26:281486 从外界来看,并联机器人仅仅是非常细分的小众领域,甚至将其称为“暂时被国际厂家遗忘的角落”,不过在机器人行业整体增长不及预期的2018年,很多国产并联机器人厂家在出货量方面却取得了可喜的成绩。
2019-03-08 09:15:591063 近年来,随着同行业内各个企业之间的竞争形势日益激烈,人力成本的不断上升,越来越多的传统制造企业愿意把更多工业机器人引入工厂,进一步提升工业生产效率,促进产业结构的智能化调整。在这个过程中,并联机器人
2019-03-23 10:50:188393 的4、6轴串联机器人已比较成熟,每年的安装量在稳步增长;而近几年逐渐兴起的另一种机器人并联机器人,正在开拓各行业的应用场景,每年的安装量在快速增长中。据相关数据统计,以中国大陆的市场为例,2014年并联市场销售约为600台,
2019-04-12 21:32:24435 
另一种具有跨时代意义的并联机器人——Delta机器人发明于20世纪80年代,发明人为Reyrnond Clavel。这种新型机器人发明的初衷是,以非常高的速度操纵轻而小的物体。1991年
2019-05-08 15:03:204809 并联机器人(DELTA)在上世纪90年代才真正引起广泛注意,具有刚度高、速度快、柔性强、重量轻等优点,与串联机器人一起构成工业机器人的重要部分。在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运
2019-05-17 14:55:374387 
6月13日,2019(第二届)高工机器人集成商大会举办,开发区企业勃肯特(北京)机器人技术有限公司发布了两款新品,型号为Phantom-1200的并联机器人,标准节拍可达500次/分钟,型号为TF-800/1200的并联二轴机器人负载提升20%。
2019-06-14 09:31:593203 据GGII数据统计,以中国大陆的市场为例,2014年并联市场销售约为620台,2015年销售约为970台,2016年销售约为1100台,2017年销售约为2790台,2018年销售约为3650台,年均以50%的增速发展,因此初步预计2019年并联机器人市场约为5800台,机器人并联市场正当其时。
2019-08-18 09:42:34945 
并联机器人在上世纪的90年代就已经有所应用了,主要在医药、电子等轻工业使用作为广泛,并联机器人有着承载能力大;精度高;占用空间小;速度快;耐磨损等特点。这对于需要高精度的工业生产来说是个很好的选择。
2019-10-28 17:18:536499 2019年6月,勃肯特正式发布第一款“双臂结构”的并联机器人——Phantom(幻影)-1200,也同时将并联机器人“双臂结构”概念首次带入到并联机器人产品中,从此,勃肯特进入了并联机器人结构全新升级阶段。
2019-11-14 14:42:421213 或者货物进行准确的抓取,成为目前行业的应用和研究热点问题,勃肯特机器人技术团队在前期已有的技术基础上,完善升级了3D视觉技术,配合勃肯特串并混联六轴机器人,开发了基于3D视觉的无序分拣技术。
2019-11-29 15:00:571121 由于食品制造和医药行业的特殊性,使其对产线设备的清洁卫生、速度节拍、拾取目标多样性等方面有特别要求,并联机器人对产品零污染、高速度、柔性化的优势广泛应用于食品制造和医药行业的分拣、装箱、装盒、取件、自动检测等领域。
2019-12-02 13:44:07952 和所有新生事物一样,并联机器人在发展初期也存在着众多的困难和限制因素,影响并联机器人的持续高速发展。
2019-12-26 15:42:211057 7日早晨5点多,天还没亮,镇江新区新能源产业园内,通宵鏖战的勃肯特机器人公司总经理高红坤长舒一口气,目送一辆重型卡车缓缓驶出,车上满满装载了勃肯特镇江工厂研发的5条自动口罩生产线,发货目的地是湖北宜昌。
2020-03-11 09:02:53808 并联机器人和传统工业用串联机器人在哲学上呈对立统一的关系,和串联机器人相比较,并联机器人具有以下特点口:无累积误差,精度较高;
2020-03-11 16:12:5010 本文对一种新型的二自由度并联机器人进行分析。机器人可以放置在一个固定方向的平面刚体。首先详细介绍了机器人的运动结构,然后分析了一些运动的问题,如正向和逆向的运动学,速度,和奇异点。对工作和装配
2020-03-26 16:27:297 目前来看,并联机器人基数尚小,相较于传统串联机器人市场,参与的玩家不多,国际企业包括ABB、发那科、博力实、欧姆龙等,中国企业包括勃肯特、阿童木、华盛控、李群等。高工产研机器人研究所(GGII)数据
2020-06-21 09:02:275551 作为工业机器人的分类之一,并联机器人市场规模相对较小,专注并联机器人的生产企业数量也较少,但是其在航空、金属加工、食品等行业的市场占有率并不低。 2019年全球经济形势动荡较大,影响了汽车和3C行业
2020-09-25 15:11:282763 速度。 事实上,即使在外部环境激荡的2019年,全球工业机器人销量同比下滑5.92%,而并联机器人由于在航空、金属加工、食品、医疗等行业的需求日趋稳定,仍处于快速增长的态势。 高工机器人产业研究所(GGII)数据显示,2019年全球并联机器人销量1.74万台,同比增长
2020-09-25 15:38:231961 2020年9月18日10:18勃肯特机器人技术有限公司和科控工业自动化设备(上海)有限公司和上海昂敏智能技术有限公司在工博会8.1H C204勃肯特展台举行战略合作签约仪式。 通过此次战略合作
2020-09-25 15:50:422821 2020年9月16日11点11分,勃肯特协作并联机器人新品发布会在工博会8.1H C204全球首发。勃肯特董事长王岳超,高工机器人总经理罗思娜等领导以及客户亲临现场为勃肯特协作并联机器人新品发布揭幕
2020-09-25 16:29:432725 在近日举行的上海工博会期间,高工机器人产业研究所(GGII)分别携手勃肯特、斯坦德、节卡机器人3家公司发布了《2020年并联机器人产业发展蓝皮书》(以下简称《并联机器人蓝皮书》)、《2020年自主
2020-09-27 14:02:482893 目前,在食品包装、3C电子、医药、日化等领域,并联机器人使用基数依然偏低,机器人价格加速下行促使制造业企业引进机器人成为可能;同时,机器人企业亦开始逐步完善后续服务体系,解决其引进机器人后顾之忧。
2020-10-10 15:40:175257 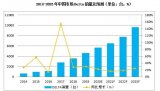
在此背景下,GGII携手勃肯特潜心打造了《2020年并联机器人产业发展蓝皮书》(以下简称:蓝皮书),并于2020年9月17日下午1300,在上海工博会高工机器人展台7.1馆D001展位举行了蓝皮书全球首发会。
2020-10-10 16:22:003413 ABB已完成对领先的并联机器人提供商CodianRobotics的收购,该公司聚焦高精度拾放应用领域,产品包括卫生级产线设计,尤其适用于食品饮料、制药等卫生敏感型行业。通过此项交易,ABB正在加速其在持续增长的并联机器人领域的布局。
2020-10-11 09:25:422600 ABB并联机器人,目前主要由ABB在上海的工厂生产。此外,2018年,ABB宣布斥资1.5亿美元在上海建造机器人工厂,预计将于2020年底投入运营,相信在机器人制造成本上会有优势。当然,ABB并联机器人一般需要外配视觉,视觉成本比较高,加之较高的品牌溢价,IRB 360在市场上的售价也长期居高不下。
2020-10-12 09:38:303394 工业机器人包含几个分支:直角坐标系机器人,四轴机器人,六轴机器人,并联机器人,SCARA机器人,协作机器人等。其中,并联机器人,是指运动平台和基座之间至少由两根活动连杆连接,具有两个、三个、四个甚至
2020-10-15 11:06:549682 10月29日,2020中国并联机器人产业发展协商会暨中国并联机器人产业联盟筹备磋商会在西青开发区圆满落下帷幕。本次活动由天津西青经济技术开发区主办,聚集了勃肯特机器人、华盛控科技、翼菲自动化、辰星
2020-11-02 10:44:412926 并联机器人(DELTA)在上世纪90年代才真正引起广泛注意,具有刚度高、速度快、柔性强、重量轻等优点,与串联机器人一起构成工业机器人的重要部分。在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运
2020-11-04 09:12:364041 针对我国食品生产行业的实际需求,基于并联机器人,机器视觉等先进技术,构建了面向食品生产包装的高速机器人分拣系统,研究了输送带上运动食品的机器视觉定位算法,设计了运动食品分级与定位的机器视觉硬件系统
2020-11-16 18:05:5926 并联机器人(DELTA)在上世纪90年代才真正引起广泛注意,具有刚度高、速度快、柔性强、重量轻等优点,与串联机器人一起构成工业机器人的重要部分。在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运
2020-11-27 11:19:543336 根据GGII数据统计,以中国内地市场为例,2014年并联机器人市场销量约620台,2015年销量约970台,2016年销量约1100台。2017年,销售额约为2790台,2018年的销量约为3650台。2019年并联机器人市场5800台。
2020-12-04 10:45:333013 并联机器人是指动平台和定平台,通过至少两个独立的运动链相连接,机构具有两个或者两个以上的自由度,以并联方式驱动的一种闭环的机器人。
2020-12-21 15:46:0311961 并联机器人机构综合设计是一个复杂而困难的问题。机构性能指标是这些问题的关键,主要包括:奇异位形,工作空间,各向同性与灵活度,力传递性能,刚度,速度与加速度等。
2020-12-21 16:23:323387 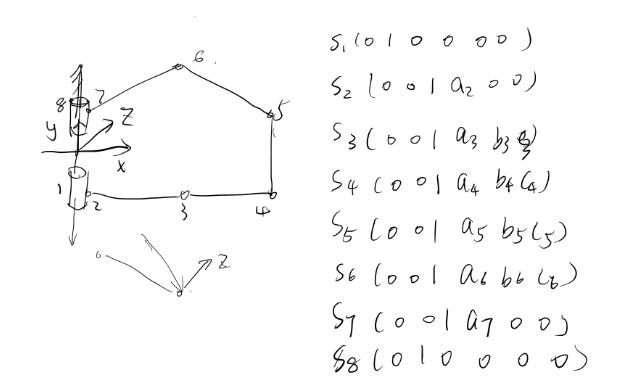
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
2020-12-26 08:21:302775 作为场景向新专场的冠名商,勃肯特研究院院长董广宇发表《技术驱动向新,并联机器人进化之路》主题演讲。他从技术创新、应用创新角度出发,分析如何打造出类拔萃的国产并联机器人品牌。 纵观整个并联机器人
2020-12-28 16:40:053222 相比传统工业机器人,并联机器人的优势则在于通过前段的物料识别,可以高精高速的把产品放到指定的位置,大量的替代人工。此外,设备还具有刚度大、承载能力强、精度高、末端件惯性小等优点,在高速运行
2021-01-07 10:35:172459 勃肯特销售总监张明表示,无论是食品、医药、日化还是半导体、面板等行业,产业链均处于快速更新期,新厂投资建设步伐加快,对并联机器人的需求也在加速释放中。
2021-04-07 16:46:062437 在自主研制的新型五自由度并联机器人的基础上, 设计完成了以微机、无刷直流电机、PCI 接口测控卡为基础的控制系
2021-05-05 23:21:003805 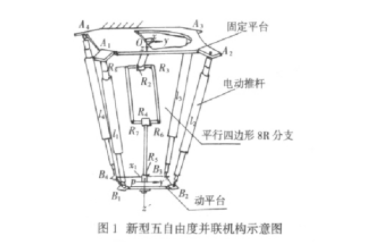
并联机器人控制。
2021-04-20 15:57:1913 为此,勃肯特专为食药行业设计了一款IP68 防水并联机器人,采用FDA认证的食品级合成材料轴承,可选304食品级不锈钢/AISI 316L耐腐蚀不锈钢,食品可直接接触,对产品零污染,生产更放心。速度更快,标准节拍可达每分钟200次,柔性化优势广泛应用于食品制造业的理料、分拣、转线、装箱、装盒等领域。
2021-04-22 10:06:072610 近年来,国内并联机器人的发展势如破竹,市场细分化趋势的愈发明显,市场对并联机器人的精度提出了更高的要求,企业要在并联机器人领域打出一片天地,自身必须要有过硬的技术实力。 勃肯特就是拥有自主技术的并联机器人
2021-05-17 09:11:052972 6月23日-25日,被誉为行业发展风向标的2021上海国际食品加工与包装机械展将在上海国家会展中心举行。在本次展会上,并联机器人领先厂商【勃肯特】将携系列重磅产品亮相。 由于食品加工与包装行业的生产
2021-06-23 15:53:362464 及数字化行业卓越技术创新企业奖,CEO宋涛作为企业核心领导人,获得维科杯·OFweek2021中国工业自动化及数字化行业先锋人物奖。 29日,在OFweek 2021中国机器人系统集成商峰会上,阿童木机器人深圳子公司总经理吴江峰带来题为“中国并联机器人的战略机遇期”的专题演讲,
2021-10-18 16:23:005085 
带 AlphaStep 绝对式步进电机的 3 轴并联机器人
2023-03-10 16:45:242602 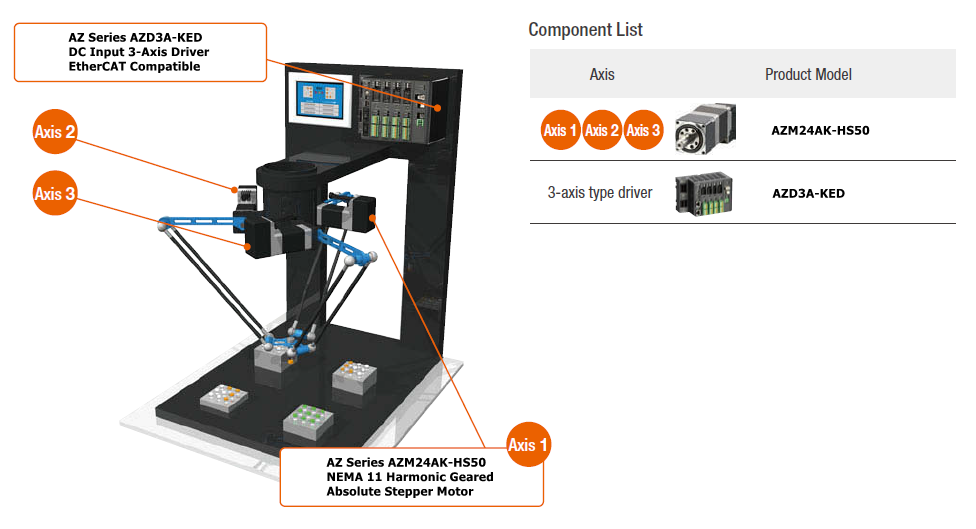
Pollard的并联机构 1962年,Gough发明了一种基于并联机构的六自由度轮胎检测装置; 并联机器人 1965年,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将
2023-11-19 15:24:252944 
并联机器人和串联机器人的区别是什么? 并联机器人和串联机器人是两种常见的机器人系统结构,它们在设计和应用上存在着一些明显的区别。 1. 结构和连接方式: 首先,从结构和连接方式上来比较,并联机器人
2024-01-26 15:17:295941 2024年工博会即将开幕,在7.1H F012展位,勃肯特机器人将设立产品展示区以及互动体验区,欢迎全球客户前来体验交流,专业的技术团队也将现场解答疑问,提供定制化解决方案咨询,为客户搭建起一座从选型到应用的桥梁。
2024-09-18 14:35:10893 
勃肯特机器人已陆续研发上市并联机器人、串并混联机器人、SCARA机器人、BeMotion控制器和无线示教器,成为拥有全系列并联及串并混联工业机器人本体产品的公司。今年混合运动型机器人HS系列重磅发布
2024-09-25 11:49:401080 
经过严格而全面的测试,翼菲并联机器人成功通过MTBF(平均无故障工作时间)20000小时认证,这一里程碑式的成就,不仅标志着翼菲机器人在可靠性方面达到了国际领先水平,更是国内并联机器人行业首次完成
2024-12-29 14:17:201454 在工业自动化领域,并联机器人凭借高速度优势,广泛应用于轻小散乱物料搬运分拣与上下料环节,也正如此,并联机器人长期被贴上“轻型敏捷”的标签:3C电子产线上精准灵巧分拣电子元器件,广大制药企业药品自动化
2025-03-18 09:22:141126
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论