移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求——避障。下面让我们来了解一下移动机器人的避障,避障是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。
2016-06-15 14:32:23 6847
6847 动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求——避障。
2018-05-15 09:30:0313928 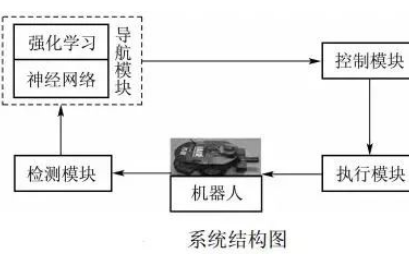
的关键技术.也是国内外智能机器人近期发展的一个热点.其显著特征是具有传感器信息反馈.可以实现很好的智能行为。本文主要针对基于传感器信息的多关节机器人实时避障方法方面的研究.详细介绍了传感器的选择和传感器信息融合技术。
2021-04-08 08:51:4110798 电子发烧友网综合报道 割草机器人的避障技术是其智能化水平的核心体现,主要通过传感器技术、环境感知算法和路径规划方法实现安全、高效的自主作业。随着智能化水平提升,割草机器人避障正从单一传感器向多模态
2025-08-17 00:03:003975 激光雷达作为自动驾驶和机器人等领域中的重要传感器,一直扮演着“眼睛”的角色,360°扫描周围环境,构建厘米级别高精度地图,为后续避障导航做辅助。 但如果仅使用激光雷达作为唯一的避障传感器,则难以
2018-08-27 17:19:46
,就能依靠经验,学习到很多更好的作业方法,并且熟练掌握。 机器人传感器可分为机器人内部传感器和机器人外部传感器两种。机器人内部传感器的功能是测量运动学和动力学参数,其提供信息的目的是控制机器人按规定
2018-01-03 17:09:03
随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉
2021-09-16 09:05:02
。 传感器是机器人完成感觉的必要手段,通过传感器的感觉作用,将机器人自身的相关特性或相关物体的特性转化为机器人执行某项功能时所需要的信息。根据传感器在机器人上应用的目的和使用范围不同,可分为内部
2018-11-08 15:55:32
激光雷达作为自动驾驶和机器人等领域中的重要传感器,一直扮演着“眼睛”的角色,360°扫描周围环境,构建厘米级别高精度地图,为后续避障导航做辅助。 但如果仅使用激光雷达作为唯一的避障传感器,则
2018-08-27 15:44:02
的Add按钮添加自定义类型以及数量的传感器。碰撞/超声/红外传感器的位置和角度也在这个页面进行配置,参考坐标为上述机器人底盘参考坐标。注意:ID不能重复定义,即使传感器的类型是不同的,ID也不可以定义重复
2019-01-24 14:42:36
模式:它可以使用HC-SR04传感器感应是否存在要跟随的物体;跟踪模式:追随者机器人是跟随黑线或白线的车辆;避开模式:避障机器人是一种智能设备,可以自动感知前方的障碍物,并通过将自己转向另一个方向来避开障碍物。
2020-09-27 15:09:45
模式:它可以使用HC-SR04传感器感应是否存在要跟随的物体;跟踪模式:追随者机器人是跟随黑线或白线的车辆;避开模式:避障机器人是一种智能设备,可以自动感知前方的障碍物,并通过将自己转向另一个方向来避开障碍物。`
2020-10-28 18:09:41
根据DF-1机器人需要实现的功能,设计DF-1机器人的传感器系统,然后实现传感器系统的具体工作电路,利用ARM9实现了传感器系统信息的采集,最后对传感器系统的效果进行了试验验证。
2019-09-18 06:17:46
的使用,也使得这款传感器最远可以检测80厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同;白色物体最远,黑色物体最近)。检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、
2021-07-19 06:11:54
` 本帖最后由 岑辉 于 2014-3-24 18:19 编辑
随着部长们的巅峰之作的出品,电子创新工作室团队又已出炉一件作品PLC做的智能避障机器人,此作品基本架构已经完成,随后将进入完善改进和调试阶段,望大家给出一些意见和建议!`
2014-03-17 22:21:19
无论是传统的工业机器人系统,还是当今最先进的协作机器人(Cobot),它们都要依靠可生成大量高度可变数据的传感器。这些数据有助于构建更佳的机器学习(ML)和人工智能(AI)模型。而机器人依靠这些模型变得“自主”,可在动态的现实环境中做出实时决策和导航。
2020-08-05 07:08:21
:设计一种基于ARM的智能清洁机器人控制系统。机器人能对未知的室内环境进行全面清扫具备避障和台阶检测功能能实现电量管理自动返回充电。内容包括:1、基于单片机对直流电机的启动、转向、转速、正反转程序
2015-07-06 10:59:02
了,一般智能的机器人都是用单片机芯片(MCU微处理器)做控制,简单一点的也需要由一些电阻、电容之类的电子元件组成的电子电路做控制。 本项目主要面向DIY机器人的初学者,可以让大家回顾一下物理电学
2012-01-10 16:50:53
避障机器人学习课程3、预计成果:学生在学习过程中学会解决问题、自足思考4、试用计划:1、拿到机器后,首先我将会把机器人的壁障原理与使用方法弄懂2、开展专题课程,讲述使用方法3、学生开始自主练习4、分析学习成果与进程
2017-07-07 18:05:19
。项目描述:设计一种基于ARM的智能清洁机器人控制系统。机器人能对未知的室内环境进行全面清扫具备避障和台阶检测功能能实现电量管理自动返回充电。内容包括:1、基于单片机对直流电机的启动、转向、转速、正反
2015-07-06 11:07:41
,各个传感器模块之间的联系。项目描述:双足行走机器人主要功能实现了机器人的行走,周围环境温度、湿度等数据的检测和实时画面的传输,机器人行走速度和关节角度实时数据的反馈。行走保证直线行走和倒退直线行走
2015-11-30 15:57:04
的投入使用提高了医院智能化、自动水平,提升了医院品牌和竞争力。2020年,医院物流机器人或许将迎来规模化应用的春天。机器人在运行过程中,必须能乘坐电梯,避让障碍物,所以测距、避障传感器是提高智能物流
2020-05-28 17:30:09
描述arduino nano避障机器人这是一个流行的 Arduino 机器人项目。为了避免大量的电线连接,我为它设计了一个PCB。该机器人项目的 PCB设计精良,易于制作。您可以使用此 PCB 制作不同类型的 Arduino 机器人。PCB+展示
2022-08-02 06:44:42
企鹅机器人由BS2控制器控制两个角度舵机实现模拟企鹅的行走,包括前进,后退与转向,同时还可以控制另外两个角度舵机模拟企鹅翅膀的动作;语音播放模块可以发出企鹅真实的叫声。企鹅机器人前端装有超声波传感器
2016-03-29 17:29:52
描述Arduino 机器人避障 | PCB版| 更少的布线在这个项目中,我使用 PCB 构建了一个最小的线版本障碍物,以避免汽车或机器人。技术细节/组件超声波传感器ARDUINO NANO R3伺服
2022-09-13 06:17:20
推荐课程:张飞软硬开源:基于STM32的BLDC直流无刷电机驱动器(视频+硬件)http://url.elecfans.com/u/73ad899cfd 由于我现在正在做一个机器人定点移动自主避障
2019-01-25 10:30:29
是我院自主研制的一款仿人机器人。本文首先对DF-1机器人总系统进行了介绍,然后根据DF-1机器人需要实现的功能,设计DF-1机器人的传感器系统,然后实现传感器系统的具体工作电路,利用ARM9实现了传感器系统信息的采集,最后对传感器系统的效果进行了试验验证。
2019-06-21 07:04:37
的实用性,还降低了成本,工作稳定可靠。机器人传感器模块能精确定位障碍物,通过软件策略能实现良好的避障。对将来家用服务机器人的研究与开发有着重要现实意义。
2018-11-06 16:01:27
。 本控制系统采用主从式控制系统。系统选用了激光传感器、超声传感器、红外传感器、光敏传感器、光电编码器等多种类型的传感器,它们之间相互组合,实现机器人小车的测距、避障、寻找目标等功能。 1 多传感器数据
2018-11-01 15:08:27
`外国牛人造超声波避障自我充电智能机器人(图文)`
2012-08-15 20:50:46
`外国牛人造超声波避障自我充电智能机器人(图文)`
2012-08-20 19:38:02
及环境监测机器人系统能够通过高清摄像头实时监视现场环境,通过外接温、湿度传感器等来采集设备现场的湿度温度、有害气体浓度等信息,通过4G、5G上传至云端;(2) 全自动巡检根据自身时间设定或云端远程
2023-04-12 15:49:23
管理移动机器人的导航算法的实现和多任务的执行。实验结果表明:该系统能够实现避障和导航功能并能顺利达到目的地。
2020-11-23 15:08:52
这是一个非常简单的避障机器人,甚至简单到没有使用控制芯片和驱动电路,使用的都是我们日常生活中随处可见的一些东西,但是却实现了基本的避障功能。第一步:准备材料首先我们要准备所有可能用到的零件,我几乎
2020-03-10 07:00:00
今天,机器人正被应用于那些先前不曾使用机器人的生产领域。针对不同的情况,必须始终分别考虑各个安全方面并针对每种应用实施合适的安全解决方案。安全的传感器技术举足轻重:为了满足所有安全相关的应用,需要采用满足传感器需要的模块化方法。
2020-05-07 08:16:08
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了
2020-05-14 08:15:00
怎么实现三路超声波避障移动机器人平台的设计?
2021-11-10 07:00:11
定位导航技术使机器人即使在无人操控的情况下,也可实现自主行走、避障及顺利到达目的地,机器人和人类绘制地图一样,在描述环境及认识环境的过程中都需要依靠地图,它主要利用地图类描述其当前环境信息,并随着
2020-08-18 06:47:00
各位大侠怎样在matlab里面绘制机器人的避障地图啊?帮帮忙!
2013-05-15 09:25:16
扫地机器人避障可以用超声波传感器,现在我想用一个传感器来测地面的清洁度,不同的清洁度吸力不同,但是不会选择传感器,不知道什么传感器可以达成这个目的,基于51单片机的,求大神指教啊啊啊啊~拜谢~
2016-04-28 13:08:39
度,并配有扭转传感器;共有 51 个关节,可以完成高度灵活的运动,,能够灵敏地进行操作和交互运动。该机器人的双手可以娴熟地操作物体,例如搬移木箱或者沏茶。后者需要复杂的动作协调性。机器人必须一只手抓住
2015-01-21 17:11:24
的出来,智能机器人对传感器有非常严格的要求,下面就列举一下智能机器人对传感器有什么具体的要求: 首先值得关注的是精度等问题,对于智能机器人来说传感器需要有精度高,可靠性高,稳定性好。智能机器人在感知
2015-01-20 14:56:46
控制和通信 IC 的发展在实现下一代的机器人中起到重要作用。然而,这些复杂的现代机器人的核心是许多新的、小型化和低成本的传感技术的出现与融合。对实现下一代机器人至关重要的几项关键传感器技术包括磁性位置传感器、存在传感器、手势传感器、力矩传感器、环境传感器和电源管理传感器。
2019-07-31 07:46:31
部的三个寻迹传感器)寻找墙边的充电位置,充电位置是一条30公分的黑线来引导机器人于充电器对接,充电器触点是磁助力触点,当机器人接近充电器时,利用磁力防止小位置的偏离,使触点良好接触。 避悬崖也是利用
2015-02-06 11:40:21
群机器人协作和舞蹈套件采用Arduino控制器完成五个两轮教育机器人的协同控制和舞蹈,并能够方便地扩展机器人的数量,完成更加复杂的协作或者舞蹈任务。每个个体机器人都配有循线传感器、红外测距传感器
2016-03-24 11:36:19
随着机器人在工厂、仓库、酒店、商场、餐厅等环境中的使用,人们对机器人的移动能力越为重视,以至于避障成为一个极为关键且必要的功能。人们希望机器人能根据采集的障碍物的状态信息,在行走过程中通过传感器感知
2018-12-12 16:04:42
红外避障传感器具有哪些规格参数?请问STM32如何使用红外避障传感器?
2021-11-25 08:50:44
机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作程序灵活;有一定程度的智能;在工作时可以不依赖人的操纵。机器人传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,机器人
2019-02-27 23:29:58
以用于帮助机器人避开障碍物,或用于其他相关项目的距离测量和避障工程。传感器可谓是用来检测机器人自身的工作状态,以及机器人智能探测外部工作环境和对象状态的核心部件。不仅能感受规定的被测量,还能按照一定的规律
2018-08-09 15:19:59
基于超声波避障技术是建立在获取机器人前方障碍物的距离和位置信息上,故超声波避障技术主要运用超声波传感器,根据超声波测距原理,结合矩阵式结构设计理念的数据融合对机器人前方障碍物的距离和位置进行定位。
2020-05-11 07:23:15
,然后根据DF-1机器人需要实现的功能,设计DF-1机器人的传感器系统,然后实现传感器系统的具体工作电路,利用ARM9实现了传感器系统信息的采集,最后对传感器系统的效果进行了试验验证。
2019-07-29 06:09:58
超声传感器是移动机器人避障常用的传感器,但存在幻影的干扰。该文提出多个超声传感器的模糊避障算法,该算法把多个超声传感器分为左右两组,如果障碍物在右侧,机器人就
2009-06-29 08:19:04 40
40 、测距等功能的实现。电应普针对泳池清洁机器人应用开发多款机器人测距、避障传感器,满足泳池清洁机器人水下和水面作业的巡航避障需求,能辅助还原水下泳池全貌,助力机器人
2024-04-20 11:29:41
电子开发机器人相关教程资料——自主机器人避障方法研究
2016-09-06 16:42:430 实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用避障使用的传感器主要有超声传感器视觉传感器红外传感器激光传感器等
2017-01-07 11:40:181742 服务机器人在家庭住宅、酒店客房、办公空间、会所等室内空间使用时,都要用到避障传感器,通常采用红外、超声波、激光雷达、双目视觉四种传感器中的一种或多种进行避障操作,本文将主要分析红外避障传感器的安装位置。
2017-01-13 09:56:135021 
吸尘机器人系统设计与避障算法研究
2017-09-25 09:25:544 近年来研究移动机器人倍受重视,仿照生物功能发明的各种移动机器人越来越多,小到娱乐机器人玩具、家用服务机器人,大到矿产勘测、工程探险、军事侦察机器人等。避障小车是一种移动机器人,它通过传感器系统感知
2017-11-02 11:00:127 随着经济及科技的快速发展,智能机器人的应用也越来越广泛。智能机器人能够通过传感器来感知外界,并达到避障功能。如何让机器人在行进过程中识别障碍物并精准避障是一个非常重要的课题。本文通过采用红外传感器来
2018-01-30 14:16:302 本项目是在 PVCBOT-A型 基础平台车——BEAM小车的基础上,加装了避障传感器以及控制电路,组成了一台具体有避障功能的小车。而这个所谓避障小车,实际上就是和 PVCBOT-1号 机器人类似的避
2018-09-18 09:35:0019532 如今的机器人无需依赖人为操控,也可实现智能行走,而这一切少不了传感器的功劳,传感器是机器人感知外界的重要帮手。说到传感器就不得不提到激光雷达,通过激光雷达,机器人可以向外界发射红外线光源,通过三角
2019-02-28 09:10:11896 
本文介绍了一种具有智能循线和避障功能的机器人设计方案,机器人系统包括控制系统的硬件和软件设计。硬件部分主要包括控莉器、传感器和电机控制电路,控制器采用16位单片机SPCE061A,循线和避障机器人的驱动采用直流电机驱动,使用红外传感器检测轨迹线和障碍物,实现了机器人的自动控制和语音控制的结合。
2019-06-18 15:49:435 针对矿井中的各种灾害,设计了一种适合矿井救援的简易避障机器人。该设计以A1’89c51单片机作为智能机器人的检测和控制核心,采用红外光电传感器实现机器人避障。在硬件设计的基础上。通过软件编程,实现了
2019-06-19 17:37:3627 ,而目前思岚科技激光测距传感器能帮助机器人实时获取所在环境的高精度轮廓信息,实现机器人的自主定位、建图及避障等功能。当然,仅靠激光雷达传感器是无法达到我们理想中的效果,为此,思岚科技推出了充当机器人
2019-08-13 14:09:411777 本文档的主要内容详细介绍的是matlab机器人避障的程序免费下载。
2019-07-02 08:00:008 ,采用边界不变矩实现障碍物和目标物的区分,改进了经典的人工势场法进行路径的规划,根据模糊控制原理设计了避障控制器和避障规则。实际的运行结果表明了该系统的可行性和有效性,该系统实现了移动机器人利用自身传感器
2019-08-29 17:03:004 移动机器人需要通过传感器实时获取周围的障碍物信息,包括尺寸、形状和位置信息,来实现避障。避障使用的传感器有很多种,目前常见的有视觉传感器、激光传感器、红外传感器、超声波传感器等。
2019-10-24 09:35:453038 实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。下面看看超声波传感器和激光雷达传感器在机器人避障中的相关解决方案。
2019-11-23 09:35:071223 自主导航技术是现代智能移动机器人实现行走的重要标志,而避障又是实现自主导航的基本要求,它是指机器人在行走过程中通过传感器感知到的防碍其运动的静态或动态物体,按照一定的算法进行实时路径更新,绕开障碍物
2019-12-13 13:49:148415 机器人避障的关键问题之一是在运动过程中如何利用传感器对环境的感知。任何类型的传感器都有各自的优点和不足。选用时需要仔细考虑各种因素。
2020-03-11 15:23:012447 近几年来智能移动机器人的在各行各业领域不断迅速发展,生产生活中智能移动机器人的使用日渐广泛。本文简要介绍了基自动循迹避障机智能机器人的设计与实现。其中包括对机器人的执行组件、搭建结构、传感器、Arduino单片机软件编程及试验结果的介绍。
2020-05-14 08:00:001 的重要标志,而避障又是实现自主定位导航的基本,它是指机器人在行走时,通过传感器感知到在其路线规划上存在的静态或动态障碍物,按照相应算法进行路径实时更新,最终绕开障碍物到达目标点。那机器人避障问题又该如何解决
2021-10-14 14:39:392868 越来越多的家庭入手扫地机器人来代替日常打扫,目前扫地机器人的清洁功能已经能够满足大部分家庭的日常需求,清洁效率成为制约用户体验的重要因素,网络上也有扫地机器人 “智障低效”的吐槽,如何突破扫地机器人的清扫效率呢?目前行业的目光都聚焦在扫地机的重要功能——避障,它也是制约扫地机器人效率的重要因素。
2020-07-29 16:17:1115328 电子发烧友网站提供《arduino nano避障机器人.zip》资料免费下载
2022-07-19 09:46:259 电子发烧友网站提供《Arduino机器人避障.zip》资料免费下载
2022-08-18 10:20:353 我们将使用超声波传感器和 Arduino 构建一个避障机器人。这里使用超声波传感器通过计算机器人与障碍物之间的距离来感知路径中的障碍物。如果机器人发现任何障碍物,它会改变方向并继续移动。
2022-09-08 15:14:004467 
电子发烧友网站提供《使用Arduino的宠物狗机器人TOMY避障.zip》资料免费下载
2022-10-28 09:32:364 电子发烧友网站提供《基于Arduino的避障机器人汽车.zip》资料免费下载
2022-10-31 09:54:535 电子发烧友网站提供《智能避障机器人开源分享.zip》资料免费下载
2022-11-08 10:21:276 电子发烧友网站提供《使用移动设备的语音控制避障机器人车.zip》资料免费下载
2022-11-21 10:05:431 电子发烧友网站提供《使用红外传感器的避障机器人.zip》资料免费下载
2022-11-24 15:03:543 电子发烧友网站提供《如何制作避障机器人.zip》资料免费下载
2022-12-01 15:15:490 Arduino UNO 微控制器来处理数据,以及一个超声波传感器来检测其路径上的障碍物。没有它,机器人的运动将非常受限和脆弱。
2022-12-22 14:49:253 电子发烧友网站提供《如何使用Arduino Uno制作智能避障机器人.zip》资料免费下载
2022-12-26 10:41:493 电子发烧友网站提供《伺服电机避障机器人.zip》资料免费下载
2023-02-08 10:02:570 水下超声波避障传感器主要应用于泳池清洁机器人,传感器安装于机器人四周。当传感器检测到有障碍物时,会将数据快速传给机器人。
2023-05-20 10:30:341714 
超声波四路水下避障传感器,是利用超声波测距原理 的展开的一种多波束超声测距的传感器,利用软件实现 多发一收的轮循测试方法,对四个方向的联动测试来达 到水下避障与水下测距的功能。产品响应速度快,精度高; 使用航插接头四芯插接模式,便于安装
2022-09-09 16:48:022840 
电子发烧友网站提供《蓝牙控制的避障机器人.zip》资料免费下载
2023-06-28 16:08:580 电子发烧友网站提供《Arduino伺服电机避障机器人.zip》资料免费下载
2023-06-29 14:38:191 避障是指移动机器人在行走过程中,通过传感器感知到在其规划路线上存在静态或动态障碍物时,按照 一定的算法实时更新路径,绕过障碍物,最后达到目标点。
2023-07-26 14:47:304661 
能够看到,市面上无论是石头、科沃斯、还是云鲸等头部厂商,其高端产品基本都是激光+视觉融合方案,并且基本支持智能避障,表现为机器人可对识别的不同障碍物信息,做出动态调整避障距离,进一步提高安全性和作业覆盖率。
2023-09-27 17:30:031646 
扫地机器人好用与否,避障表现首当其冲,那么评判避障好坏的标准又是什么?
2023-09-28 11:38:531595 
移动机器人需要通过传感器实时获取周围的障碍物信息,包括尺寸、形状和位置信息,来实现避障。避障使用的传感器有很多种,目前常见的有视觉传感器、激光传感器、红外传感器、超声波传感器等。 超声波传感器
2024-06-19 17:06:143870 
机器人红外避障
2024-09-19 12:57:070 一、AGV多传感器融合实时避障系统介绍 1.简介 传感器融合技术是机器人实现全覆盖避障的关键,其原理仿效人脑综合处理信息的方式:通过协调多种传感器(如激光雷达、视觉摄像头等)进行多层次、多维度的信息
2025-05-28 14:21:231172 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论