加州大学伯克利分校的研究人员开发出一种佩戴在耳朵上的3D打印设备。通过使用红外传感器来跟踪鼓膜(也称为耳鼓)的温度,该设备能精确地实时测量用户的核心身体温度,允许用户更紧密地跟踪自己的身体状况。这项研究已经发表在《ACS Sensors》杂志上。
2020-07-29 07:21:46
机器公司日前向市场推出首款3D食物打印机,不久将在中国投入生产。这是一款名为Foodini的机器,它使用3D技术,可以像传统打印机一样,用5个配料槽代替原来的墨盒,通过层层的打印,制作出你选择的食物
2014-04-15 16:10:23
3D图形控件设置并联机器人(如Delta机构)各两件间的对象关系,怎么设置啊有没有人知道啊?目前见到的都是串联型机构。
2020-03-28 21:42:43
描述CM6 安全、合规,而且最重要的是便宜。CM6 是一款使用 QDD(准直接驱动执行器)的 3D 打印 COBOT 机械臂。QDD 赋予 CM6 被动顺从性,使其表现得像人的手臂。 执行器与大多数
2022-07-14 06:05:53
求大神上传一个六足机器人的骨架图纸
2014-07-28 10:32:54
谁会做六足机器人,求资料??大神们
2013-06-06 00:01:39
仿真实验变得十分重要. 对机器人进行图形仿真,可以模拟机器人的动态特性,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到从数据曲线和数据本身难以分析的很多重要信息
2021-09-01 06:45:48
机器人想法创意,不错过精彩内容素材来源:电路城机器人迅速发展,随之涌现出了一大堆创意机器人设计,魔方机器人,寻迹机器人,六足虫虫机器人……电路城给你十个创意机器人陪你玩耍,一起去看看吧...
2021-07-21 07:31:24
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
波士顿动力创始人Marc Raibert 1986年的书,足式(腿式)机器人开山之作,研究集中在平衡和动态控制的核心问题上
2017-12-11 10:22:52
去年 1 月份,瑞士公司 ANYbotics 放出来一款灵活的四足机器人——ANYmal,它可以对抗各种恶劣的现实环境,适用于在危险的工业场景中执行任务。在最近的世界机器人大会上,ANYbotics
2021-12-31 06:28:53
本帖最后由 colorsky 于 2016-4-21 14:05 编辑
大家好,我是ColorSky。这是我的双足机器人的开源项目。先发出视频给大家看看,后面陆续会把技术资料上传。机器人鞠躬动作机器人舞蹈1视频机器人跳机器舞视频
2016-04-21 10:51:28
`在本项目中,我将从头开始打造一个能够使用蓝牙进行控制的四足乌龟机器人。该机器人拥有两个自由度,采用的是爬行的方式进行运动,所以在不平坦的地面可能不能正常工作。第一步:3D打印组件本机器人的部分
2015-12-11 17:26:04
摘要:经过大一那次失败之后,我决定暂时停止该项目的开发,转而先去学习那些有关嵌入式开发的基础知识,等以后有能力的时候再去独立完成这个六足机器人。很幸运的是在我大学本科即将结束的时候,我已掌...
2021-07-20 06:14:40
用于 IMU 模块、蓝牙模块甚至 IR 传感器阵列的专用插槽,以制造机器人自主性。机身由激光切割的 3 毫米亚克力板制成,也可以 3D 打印。它是爱好者探索 机器人逆向运动学的绝佳项目。我在
2022-08-09 06:30:29
基于soildwork绘制的3D机器人模型,要求实际的机器人在运动时,将3D的模型加载在LABVIEW中,与实际机器人同步动作,做运动演示。
2013-02-28 16:51:41
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
求大神指导怎么做多足机器人的行走的动画演示!!!
2017-04-23 11:36:56
描述此参考设计由 QVGA 分辨率 3D 飞行时间 (ToF) 传感器 OPT8241 和 ToF 控制器 OPT9221 组成,展示了 TI 3D ToF 解决方案在扫地机器人的类似配置和环境下
2018-10-11 15:37:51
终于意识到谷歌在机器人研发领域所下的决心。需要指出的是,波士顿动力公司其实是由美国麻省理工学院(MIT)在1992年剥离出来的机构,自分离后便一直从事发军事项目的研发工作,并获得了美国国防部高级研究
2014-12-30 16:31:19
用labview如何编写六足机器人三足步态的程序?主要的依据和原理是什么呢?求指教!
2016-08-04 19:21:05
)仿生六足机器人开发流程以及细节仿生六足机器人三维模型简图论文、D-H数学模型 、程序、硬件原理图至附件下载
2014-03-27 18:51:05
的芯片,一定会让六足机器人完成更多的创新!项目描述:开发项目:六足机器人。初步方案:六足机器人,模拟蜘蛛步态,六个足,每只足三个舵机,总共十八个舵机,全部用PWM波控制,前期确定整体结构的设计,然后组装舵机,用固定的动作组(开环)模拟蜘蛛步态。后期设计算法(闭环)使六足机器人更加智能化。
2015-11-25 15:35:26
步行机器人,一直想做一个会走路的机器人,目前有3D打印机,15个高精度数字舵机,以及多个传感器模块,机器人外壳及电机支架用solidworks建模软件制作,然后采用matlab与intel Edison
2016-07-13 16:21:18
申请理由:本人是一研究生,研究的是机器人方向,里面需要的很多参数和MiCOKit 开发板有关,很希望能申请到,谢谢.项目描述:这是一款基于F2812DSP的一款和热感应有关的机器人系统,内部含有蓝牙,红外感应、Wi-Fi等模块,是一款多操作的机器设备。
2015-07-24 07:18:22
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-08-09 17:12:20
申请理由:项目描述: 现有一个六足机器人平台,但是没有心仪的开发板来控制,之前有用过STM32F4的单片机。F412ZG的定时器丰富,IO口数量充足,具有各类通信外设,十分适合做六足机器人的控制开发
2016-11-14 18:54:33
申请理由:手头有个毕业设计是采用stm32的。。想试着换换主控。来作为六足机器人的主控板。。32虽然够用。但是毕竟烂大街。。正好试试学着用用其它款单片机。项目描述:使用申请的开发板做主控。用
2015-07-17 16:53:26
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-08-07 22:30:34
申请理由:我是在校大学生,大三,在学校的创新团队搞研发,今年5月份申请了省级项目---基于物联网的六足爬行机器人,并且已经审批通过了。正在设计制作此项目。我们发现,现在的机器人都收到空间的局限性
2015-09-09 17:03:59
项目名称:机器人试用计划:1.熟悉开发板2.将开发板试用过程写成帖子分享出来3.将板子加入到已经做好的3d打印机器人中,实现控制。分享控制方法
2017-05-23 14:26:43
申请理由:我想通过这一款机器人开发出来一套课程,更容易让中小学生接受的。因为我知道乐高的EV3和NXT在中国应用的非常火爆,尤其是在中小学生的学习中,所以我想通过对该套件的研究学习开发出一套属于中国
2015-10-29 11:00:00
个可以在平坦地形快速移动的小型双足轮机器人,它能够通过跳跃来翻越障碍。本文给出了机械设计以及系统整体的结构,同样也给出了应对不同场景的多种控制器的开发。在最终的原型机进行了一系列实验,验证了这些行为在
2021-08-30 07:26:06
传感器。四足机器人重2.2kg,有8个自由度,四条腿上都搭配了足底传感器。其他零件由3D打印和现成的零件构成,可以做出重量轻且低成本的机器人,这也使得其他研究团队可以快速开发和复制此项目。本文系统地描述了
2021-09-13 06:33:53
【毕设】六足机器人的设计序这个项目是我本科毕业设计作品,可实现功能有常规控制(前后左右移动、左右自旋)、保持自平衡、三档变速及自主避障功能,历时三个月在家独立完成。应各位的请求写一篇项目技术总结
2021-08-18 07:05:57
进行简化,采用加藤一郎结构,为双足步行机器人下肢配置了 6个自由度。本作品是基于SC89F5162单片机的六自由度双足机器人,由机械结构、舵机控制模块和主控核心上位机组成。可以完成直立,行走,卧倒,翻滚
2014-01-02 14:31:52
的机器人,用来研究儿童社交发展。第三个机器人是一个3D打印的人形机器人,名叫Marc(多驱动机器人伴侣)。 研究者为三个机器人的程序中编入了“认知偏差”,允许机器人犯错误,做出错误的假设,还可以表达出
2015-12-28 14:42:31
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足机器人的行走步态设计、舵机的梯形速度控制、多路舵机的协调控制
2016-03-24 16:17:53
即可。[color=rgb(***,***, 101)]这款打印设备之所以能够利用智能手机进行打印,其核心原理在于研究人员开发的一种照射可见光即可硬化的光敏树脂,这种树脂不需要激光或紫外线就能进行3D
2015-12-28 15:19:56
` 由日本自电机巨头安川株式会社和日本国立先进工业技术(AIST)研发一款机器人Mahoro。它可以代替人类成为实验室的操作人员。不像以往的机器人,Mahoro拥有7个关节,这样可以让它像人类那样
2015-01-22 14:42:31
本设计主要研究的是小型仿生六足机器人控制系统的开发,其采用自主设计的控制器作为硬件平台。控制器主要有微处理器、驱动模块、电源模块、外围扩展构成。其中驱动模块采用了分时复用的原理,将处理器的 3 路
2020-10-13 09:13:11
`Keecker公司的创始人,前谷歌公司员工Pierre Lebeau研发出了一款能歌善舞的智能机器人,旨在改变家用娱乐和连接设备市场。Keecker 公司推出的这款新型智能机器人 Wibot 是一
2015-01-16 12:01:24
第三章、双足机器人的硬件结构与框图一、双足机器人的硬件框图图1. 双足机器人结构框图
2013-11-25 11:30:18
。除青蛙之外,它的身体还受到蛇和昆虫幼虫的启发。它身上黏糊糊和刚性的部位都是由3D打印出来的。Flipperbot是一个海龟机器人,设计初衷是为了研究海龟、海豹这种用蹼在地面上爬行的动物。乔治亚
2016-08-24 10:33:05
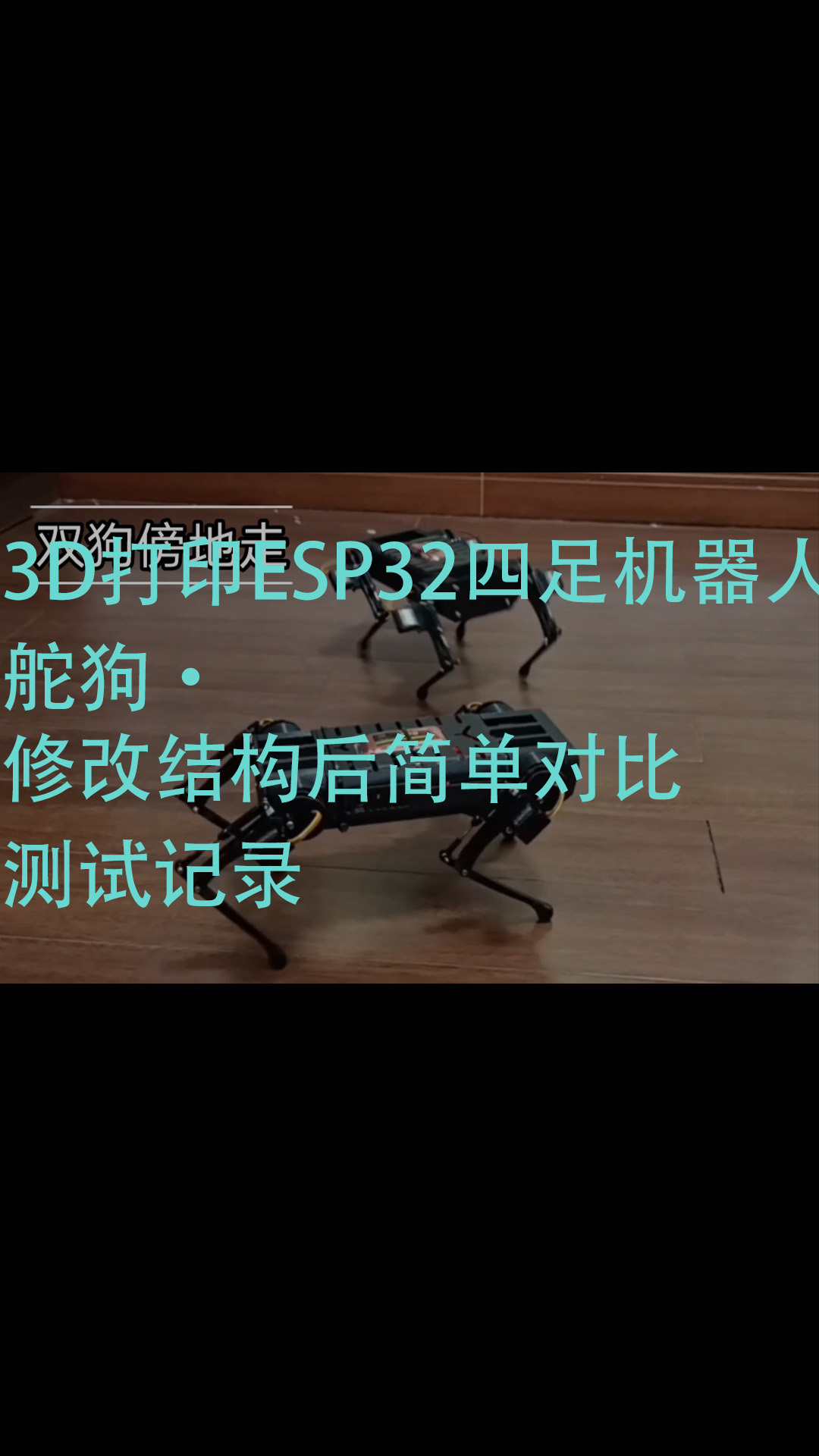
`这是创客集结号的作品四足机器人身体和四足都是通过3D打印技术打印出来的,通过自己安装连接上超声波传感器,制作成功的四足机器人完全就很了。`
2018-09-29 09:55:09
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
2021-09-15 06:54:01
本帖最后由 红尘。破 于 2016-8-19 14:59 编辑
今天整理资料时发现了一年前做的四足仿生机器人,当时买了一个四足仿生机器人的骨架,画了个板子,写了个测试代码,能完成简单的行走,后面加了避障、显示功能啥的,不过视频资料没了,只有简单行走的视频,优酷链接在下面评论
2016-08-19 14:59:33
等不良后果。这种手术机器人的切口十分精确,绝不会伤及前列腺周围神经。心血管手术机器人东京大学研究人员去年开发出一台适合做心血管微创手术的新型机器人(C-PORT-FLEX A)。众所周知,心胸手术
2011-03-01 10:27:46
描述AR.LO - Arduino 3D 打印机器人AR.LO 是一款基于 Arduino 的 3D 打印 2 轮机器人。它具有:OLED 显示屏、超声波传感器、蓝牙模块和 2 个改进的伺服电机
2022-08-12 07:55:16
通过安芯一号控制双足机器人腿部关节六个舵机的角度以及转动角速度,使机器人完成行走,翻滚,原地360等动作。机器人在规定区域内向前走,通过传感器找到动作区,完成一系列动作;并且可以通过串口与PC机时时通信,传回机器人的参数
2013-09-28 18:58:35
如何完整的组装四足机器人?
2021-09-24 07:00:54
手撸六足机器人(三)----------确定控制方式“摇杆模块+LCD屏幕显示+蓝牙通讯”及源码示例[STM32实现]关于这一块,本来是想用0.96寸的OLED实现的(小巧便宜),可惜快递停运。手头
2022-03-02 06:32:31
如何打造一款服务型机器人发布人:郭向梅联系方式:0312-3102650-609发布时间:2017-8-11 最近几年,机器人相关的话题被炒的火热。在小编儿时的记忆中,认为机器人只有两类,一
2017-08-11 15:21:51
如何设计一款球上自平衡机器人?
2022-02-22 07:39:46
如题。在论坛有看到家用机器人的2014年度十大款类型。比较感兴趣,不知道有没有大神了解比较全面的家用机器人知识?
2015-02-11 11:16:00
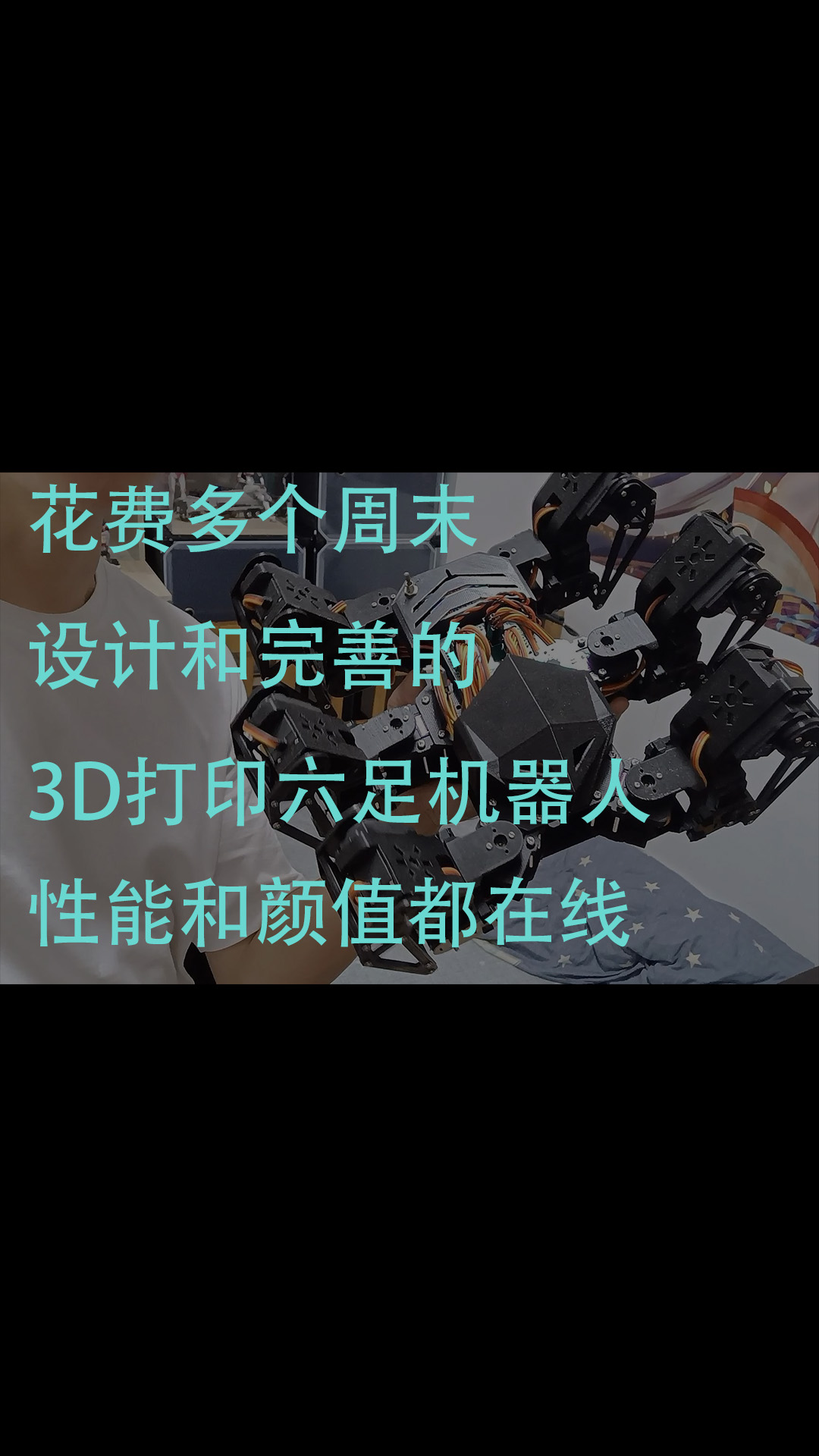
有很多小伙伴喜欢在没事的时候鼓捣一些机器人什么的,现在给大家分享一个仿生机器人开源资料,喜欢的小伙伴可以看看。六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态
2020-10-10 09:57:11
江苏激光联盟导读:据悉,《Nature》报道了美国康奈尔大学的最新研究成果,该校研究人员领导开发出 首个含半导体元件的微型机器人。该机器人的尺寸与草履虫相仿,可用激光控制其腿部行走。▲微型机器人
2021-09-10 07:35:09
怎么实现六足机器人的设计?
2021-11-22 08:02:22
基于STC15/LPC845的四足机器人是由哪些部分组成的?怎样去制作一款基于STC15/LPC845的四足机器人?
2021-09-26 08:46:16
能计算出建造给定结构的最高效方法。在12小时内,由22个机器人组成的团队能建造两座4.5米高(和一辆双层巴士的高度差不多)、像树一样的结构。研究人员在日前出版的《科学—机器人学》杂志上报告了这一
2018-10-11 14:05:27
跟踪等领域。不同种类的机器人由于工作的重点不一样,它的视觉系统在软件或硬件上都有着细微的差别。本文研究基于服务机器人的单目视觉系统。它处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
2020-04-07 07:27:24
视觉系统的发展趋势怎么样?3D视觉系统应用在哪些方面?未来的机器人3D视觉系统将会发生什么样的变化?
2021-05-11 06:40:14
机械昆虫-六足爬行机器人
2014-08-30 15:38:26
`业余,想想做一做六足机器人。但是苦于无大致图纸,卡在建模的问题上。求六足机器人的图纸,有清晰的尺寸就行(主要是腿)。`
2019-03-26 18:43:17
求契贝谢夫四足机器人的各部件尺寸
2013-11-27 15:42:51
导读: 物联网、增强现实(AR)、3D打印和机器人技术,曾经只能在科幻电影里看到的黑科技,正在逐渐走进我们的生活。由口袋妖怪到AR红包,越来越多的新技术在不断走进我们的生活!似乎每过一天,新技术就变
2017-10-19 09:18:04
任务,人类必须要从头搞出来一个机器人来。现在,耶鲁大学的研究人员告诉你:我们研究出了一张机器人皮,披上它,能让你身边随便什么东西秒变机器人,你信不信?据介绍,该机器人皮肤可以根据用户个人的需要
2018-09-26 09:01:55
美国卡内基梅隆大学的研究人员近日发布了一款外形酷似变形金刚的新型机器人,它不仅能够走路上墙,还可以变形成一辆坦克越过崎岖不平的地面。CHIMP是一个能够像人类一样攀爬梯子的四足机器人。CHIMP变身
2013-03-26 21:00:02
` 本帖最后由 dfood 于 2015-2-13 16:41 编辑
自己做的3D打印机器人`
2015-02-13 16:17:33
`苹果公司在周一的发布会上低调曝光了他们研制的第一款机器人—— Liam。这款机器人,主要是用于 iPhone 手机的回收。这是具体怎么做到的的?`
2016-09-02 10:53:45
(A4988 和兼容)。它还支持多达 8 个末端停止器(每个电机 1 个)和一个 pwm 输出来控制机器人工具。它还具有 5V 和 12V 辅助电源轨。Thor是一个具有六个自由度的开源和可打印机械臂。其配置
2022-07-25 07:04:10
本人新手,最近在准备制作一个六足机器人,如果利用舵机控制器+遥控手柄套件的话,可以很容易就实现简单的功能。为了能让六足机器人实现更加复杂的功能,我想利用arduino+树莓派+舵机控制器的方式。这样
2015-11-10 15:33:17
的Arduino来编程。所有这些功能让虫虫的行走更加复杂,互动更加丰富。可以实现前进、后退、避障拐弯、巡光等功能。简单的组装让你了解最基本的机器人原理和智能控制。喜欢DIY的用户,还可以在原有代码的基础上改造出自己的互动模式。所以,其实打造一款机器人并没有那么难啦。六足虫虫机器人实物展示:
2016-08-02 14:43:18
。虽然我相信自己已经开发出了一个成功的步态模式,并且依靠当前所有依靠3D打印的零件能在房间里轻松走很多步。但是,在大约四到五步的时候,它所有的关节都会发生倾斜,弯曲,甚至扭曲,导致它重心不稳,走路也会
2016-01-06 14:48:10
来自波兰Poznan的Omni3D公司以其高品质的DAVID-SLS-2 3D扫描仪而知名,最近该公司新推出了一款非常出色的Factory 2.0 3D打印机,这款3D打印机有几个主要特色使得它显得与市场上的其他大多数机器截然不同。
2020-08-25 07:55:47
龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程控制实现12个电机协调的控制行走,实现对六足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:六条腿协调前进 、后退、转弯的算法,超声波导航和避障
2016-03-23 17:49:48
龙人六足机器人龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程控制实现12个电机协调的控制行走,实现对六足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:六条腿协调前进、后退、转弯的算法,超声波导航和避障
2016-03-24 16:25:46
据报道,剑桥大学的研究人员开发出了一款可以帮助菜农剥掉生菜最外面烂叶子的机器人。
2018-09-28 17:21:59 1009
1009 近日,美国德克萨斯大学奥斯汀分校科克雷尔工程学院的研究人员研发出一款双足机器人“水星(Mercury)”,该机器人能够在被人类意外击中或在没有警告的情况下施加力量时保持平衡。
2018-10-16 15:22:133644 最近,美国伦斯勒理工学院的研究人员们研发出了一种新型的3D打印技术。该技术可制造出带有血管的活性皮肤,这也使3D打印技术得到了提升。
2019-11-04 11:33:542581 据外媒New Atlas报道,昆虫会在不同的步态之间快速转换,以应对外界刺激。科学家们现在创造了一个小型机器人,利用集成的人工神经网络,可以做同样的事情--这项技术最终可能会被用于性能更好的假肢。这款3D打印的六足机器人被称为NeuroPod,由西班牙的研究人员开发。
2020-04-16 10:31:39630 当您3D打印时,现有的技术都是一层一层的打印,速度很慢。现在,来自瑞士EPFL的研究人员表示,他们已经开发出了一种全新的方式来创建3D对象,它具有空前的分辨率和创纪录的打印速度。
2020-04-28 11:50:292756 波兰华沙大学的研究人员利用激光直接书写(DLW)3D打印技术设计出了微米大小的镜片。这种3D打印的透镜可以在各种材料上制作,包括易碎的石墨烯类材料。
2020-05-18 23:36:593803 研究人员使用音圈模组3D打印创建仿生机器人手指。人类天生就可以通过关节的骨骼内结构进行复杂的运动,韧带和肌腱弹性地连接使人类运动成为可能。 不过在科学领域将弹性和非弹性材料结合起来将解决机器人技术
2020-09-07 10:49:47604 理工学院的研究人员开发出了一种超声波抓取器,通过声波悬浮,该抓取器可以在零接触的情况下拾起和操纵小物体。这使得机器人能够处理易碎物品,例如精密手表零件。 这款设备由前ETH博士生马塞尔舒克(Marcel Schuck)制作,作为其ETH先
2020-12-03 11:28:331173 2021年1月7日,天津大学的研究人员3D打印出了一种可定制的模块式软体机器人,它能够在工业设施的管道上爬行,并进行检查和实时监控。
2021-01-12 09:23:47713 美国化学学会(ACS)的研究人员开发出小型的游泳机器人,该机器人可以自我磁疗。如果水下机器人在执行任务时分解为两到三块,则水下机器人会使用研究人员设计的模仿活体组织愈合特性的方法,将自己拼凑
2021-04-07 15:06:531276 随着3D打印技术的进一步发展,3D打印相关的技术也是一直在被研发的。近日,America纽约州立大学布法罗分校(the University at Buffalo)的研究人员开发了一种3D打印石墨烯气凝胶的新方法,克服了两个关键障碍使其能够很好地用于水处理。
2021-04-23 15:18:09625
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论